空间站在轨组装式货物气闸舱的制作方法
本发明属于载人航天器总体设计,涉及空间站在轨组装式货物气闸舱。
背景技术:
1、人造卫星的入轨方式可分为运载火箭发射入轨和载荷舱释放入轨。大多数人造卫星都是由运载火箭将其送入预定轨道,大致可分为直接入轨、滑行入轨、过渡入轨三种。由运载火箭将人造卫星直接送入预定轨道的特点是时序固化,即运载火箭将人造卫星送到太空什么高度、什么方向角、什么速度、什么时候分离都是固定程序,在火箭发射之前就已经确定好,发射后一般不可更改。
2、由载荷舱释放人造卫星是卫星入轨的另一种方式,空间站、载人飞船、货运飞船都能胜任此项任务。载荷舱释放人造卫星也可分为三种方式,一是卫星和卫星释放装置安装在载人飞船/货运飞船舱外,载人飞船/货运飞船在轨飞行期间卫星释放装置将卫星从飞船舱外弹射脱离,完成卫星释放;二是航天员通过出舱活动,将卫星携带出舱,然后徒手释放卫星;三是航天员在密封舱内将卫星和卫星释放装置连接形成组合体,组合体通过气闸舱出舱,机械臂抓取组合体并调整至释放角度,卫星释放装置将卫星弹射脱离,完成卫星释放。由于飞船受运载火箭包络限制,其发射时安装在舱外卫星及卫星释放装置尺寸较小,仅可释放数量稀少的立方星或微卫星,无法释放小型、中型或大型卫星,且卫星经历上升段力学环境后无法在释放前进行全方位功能性能测试,卫星释放效率不高,任务风险相对较大。航天员出舱徒手释放卫星,由于释放角度、释放初速度不易控制,该方式无法成为主流的卫星在轨释放途径。第三种方式中,卫星装载在软质货包中通过货运飞船上行,上升段力学环境较好,不易导致卫星损坏,且卫星出舱前,在航天员和专用检测设备支持下,可对卫星进行全面检查,确认卫星状态正常后才可出舱,提高卫星在轨部署的成功率,同时由机械臂辅助进行卫星释放,释放角度多样且精确,因此该方式已成为主流的卫星在轨释放途径。
3、目前一般采用的方法为,航天员与地面配合完成待释放的立方星/微卫星出舱前测试,航天员将待释放的立方星/微卫星装载至立方星释放机构/微卫星释放机构,航天员将立方星释放机构/微卫星释放机构安装在货物气闸舱的载荷转移机构上,航天员关闭货物气闸舱内舱门,货物气闸舱泄压并打开外舱门,载荷转移机构将立方星释放机构/微卫星释放机构送出舱外,机械臂抓取立方星释放机构/微卫星释放机构并将其从载荷转移机构上取下,机械臂调整至待释放构型,在机械臂控制下立方星释放机构/微卫星释放机构将立方星/微卫星弹射分离,完成立方星/微卫星在轨释放,机械臂立方星释放机构/微卫星释放机构安装在载荷转移机构上,载荷转移机构缩回并关闭外舱门,货物气闸舱复压,航天员打开内舱门并将立方星释放机构/微卫星释放机构从载荷转移机构上取下,准备下次卫星释放任务。受货物气闸舱内、外舱门通过性限制,上述方法仅可支持释放立方星和微卫星,无法释放中大型卫星。随着卫星技术的发展,功能、性能要求提高导致其尺寸包络同步增加,在轨释放中大型卫星已成为现阶段的迫切需求,急需一种用于释放中大型卫星的气闸舱。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出空间站在轨组装式货物气闸舱,可实现中大型卫星在空间站密封舱内组装、测试,并通过气闸舱出舱和在轨释放,有效提升卫星部署成功率,降低卫星研制成本。
2、本发明解决技术的方案是:
3、空间站在轨组装式货物气闸舱,包括用于卫星在轨释放的在轨组装式货物气闸舱和用于暴露载荷进出密封舱的在轨组装式货物气闸舱;
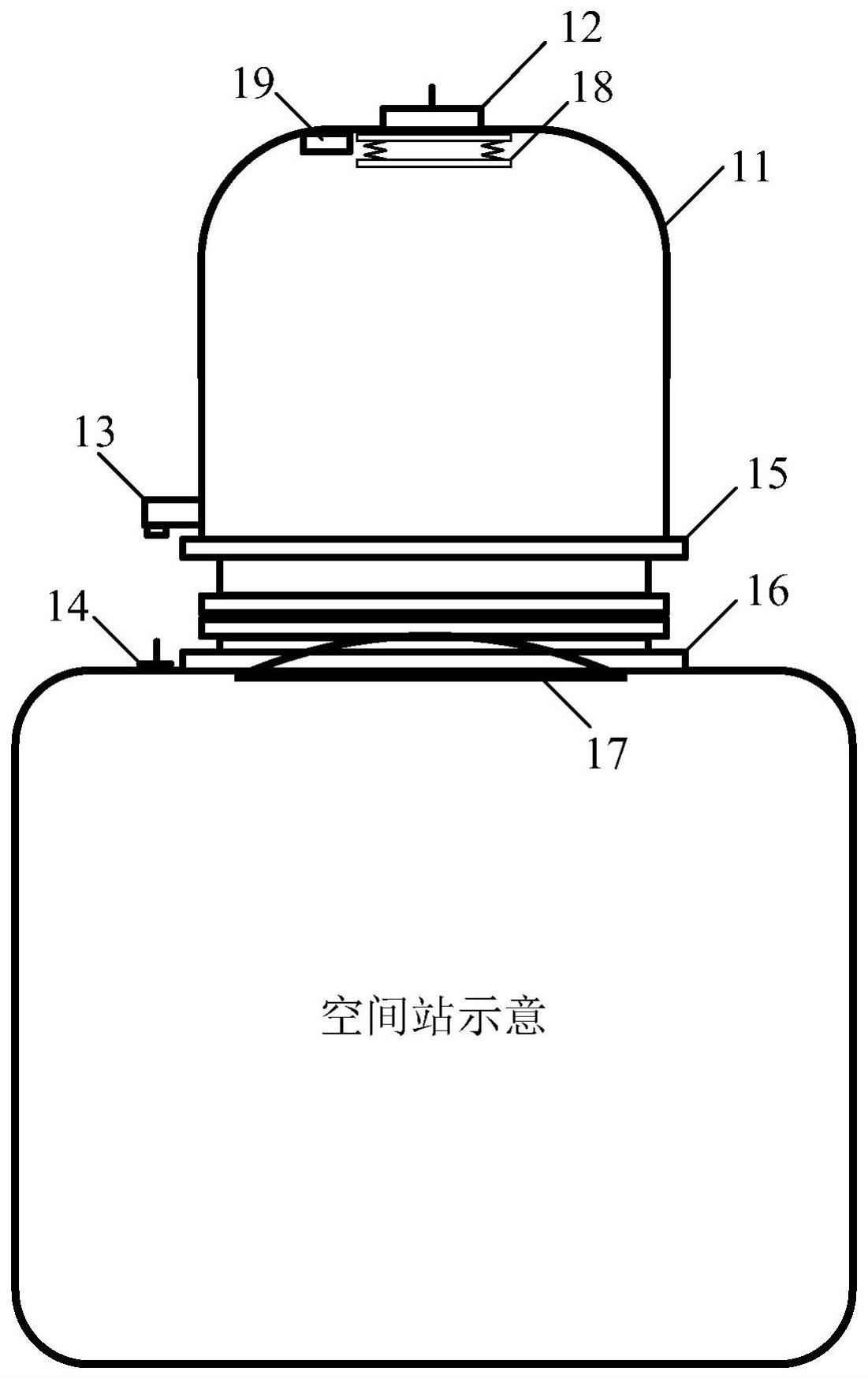
4、其中,用于卫星在轨释放的在轨组装式货物气闸舱包括钟罩式主结构、机械臂适配器、对接相机、对接相机靶标、通用停靠装置被动端、通用停靠装置主动端、内舱门、卫星释放装置、释放装置管理器和功能子系统;其中,功能子系统包括热管理子系统、泄复压子系统;
5、其中,钟罩式主结构由壳体结构和内部结构组成;壳体结构由钟罩式壁板、顶部法兰、底部端框焊接成型;钟罩式壁板为整体壁板结构,沿环向由4块接近90°壁板焊接组成;顶部法兰用于安装机械臂适配器;底部端框用于与通用停靠装置被动端的机械连接;内部结构是蜂窝板和金属支架次级结构,用于安装卫星释放装置和释放装置管理器;机械臂适配器安装于钟罩式主结构顶部,是气闸舱与空间站机械臂的接口设备;外部空间站机械臂通过抓取机械臂适配器实现对气闸舱的操作;对接相机安装于在钟罩式主结构柱段外侧壁,靠近通用停靠装置被动端;对接相机靶标安装于空间站外舱壁通用停靠装置主动端处;对接相机光轴与对接相机靶标中心轴同轴;对接相机用于拍摄机械臂安装或拆卸气闸舱过程中通用停靠装置主动端和通用停靠装置被动端之间相对位姿图像,并将图像通过lvds接口传输至机械臂,由机械臂解算出主动端和被动端之间相对位姿数据,用于机械臂运动闭环控制;内舱门安装在空间站密封舱舱壁上,位于通用停靠装置通道中心位置,由航天员手动操作进行打开或关闭;卫星释放装置实现与待释放卫星的手动连接和自动分离功能,并为待释放卫星提供释放初速度速度,使待释放卫星穿过通用停靠装置被动端并远离气闸舱;释放装置管理器接收外部机械臂100v供电,并通过1553b总线与机械臂通信;在接收到外部机械臂释放卫星指令后,释放装置管理器控制卫星释放装置的驱动机构解锁弹射机构,完成待释放卫星的释放;热管理子系统指在气闸舱舱壁外侧包覆多层隔热材料,并在多层隔热材料上表面包覆一层防原子氧布,在气闸舱舱壁内侧包覆隔热泡沫,并在隔热泡沫上表面粘贴一层阻燃布;泄复压子系统包括泄压模块和复压模块两个功能模块;泄压模块由气体复用组件和泄压组件组成,泄压开始后利用气体复用组件将大部分气闸舱内空气复用至空间站密封舱;气体复用结束后,通过泄压组件将气闸舱残余空气排向外太空。
6、用于暴露载荷进出密封舱的在轨组装式货物气闸舱包括双向直通式柱状主结构、机械臂适配器、对接相机、对接相机靶标、通用停靠装置被动端、通用停靠装置主动端、内舱门、双向货物转移滑台、外舱门和功能子系统;其中,功能子系统包括配电子系统、信息子系统、热管理子系统、照明与摄像子系统和泄复压子系统;
7、其中,双向直通式柱状主结构由壳体结构和内部结构组成;壳体结构由柱段壁板和前端、后端两个端框焊接成型;其中,柱段壁板为整体壁板结构,沿环向由4块接近90°壁板焊接组成;靠近通用停靠装置被动端的一侧为前端框,实现与通用停靠装置被动端的机械连接;与前端框对应的柱段一侧为后端框,作为外舱门门框用于安装外舱门门轴、门轴驱动机构、门锁、门锁驱动机构,并提供与外舱门门体密封圈配对的密封法兰面;在气闸舱壁板结构内侧壁设置加强筋,均布安装孔,为双向货物转移滑台提供连接安装接口;气闸舱内部结构是铝蜂窝板和金属支架次级结构,用于安装气闸舱核心管理单元、交换机、供配电单元、摄像机、照明灯、外舱门控制驱动器;机械臂适配器安装于双向直通式柱状主结构柱段外侧壁,是气闸舱与空间站机械臂的接口设备;外部机械臂通过抓取机械臂适配器实现对气闸舱的操作;对接相机安装于气闸舱柱段外侧壁,靠近通用停靠装置被动端;对接相机靶标安装于空间站外舱壁通用停靠装置主动端旁边;对接相机光轴与对接相机靶标中心轴同轴;对接相机用于拍摄机械臂安装或拆卸气闸舱过程中通用停靠装置主动端和通用停靠装置被动端之间相对位姿图像,并将图像通过lvds接口传输至机械臂,由机械臂解算出主动端和被动端之间相对位姿数据,用于机械臂运动闭环控制;内舱门安装在空间站密封舱舱壁上,位于通用停靠装置通道中心位置,由航天员手动操作进行打开或关闭;双向货物转移滑台由机械模块、控制模块组成;机械模块用于实现暴露载荷进出舱的动作及功能;控制模块用于实现对机械模块的状态监测、温度测量、供配电、指令控制、故障处置功能;外舱门安装在双向直通式柱状主结构后端框上;外舱门为圆形舱门,开启方向朝向气闸舱外侧,满足双向货物转移滑台的伸缩机构伸出气闸舱外且携带暴露载荷转移的通径要求;配电子系统用于气闸舱各个飞行阶段能源分配、负载管理与控制、电气设备间的低频电缆网连接,由供配电单元和电缆网组成;气闸舱与空间站密封舱组装完成后,通过安装在通用停靠装置上的电路浮动断接器插合,气闸舱供配电单元连接至空间站母线控制单元,实现100v供电母线接通;气闸舱供配电单元与本舱各用电负载通过电缆网连接,提供受控的100v供电;信息子系统包括1553b总线网、以太网2个功能模块;1553b总线网以气闸舱核心管理单元作为数据管理中心,设置两组总线作为本地平台总线;其中一组与空间站对接并网,另一组实现气闸舱内部指令控制、遥测参数采集、功能子网间数据传输;以太网以气闸舱交换机为数据交换中心,一方面气闸舱的摄像机的网络终端接入到交换机,另一方面气闸舱交换机通过对接并网接入到空间站顶层交换机,实现高速网络的连接,服务于图像数据传输与控制;热管理子系统包括被动热控系统和主动热控系统;被动热控系统指在气闸舱舱壁外侧包覆多层隔热材料,并在多层隔热材料上表面包覆一层防原子氧布,在气闸舱舱壁内侧包覆隔热泡沫,并在隔热泡沫上表面粘贴一层阻燃布;主动热控系统指气闸舱流体回路,收集气闸舱设备热耗,同时对气闸舱壁上低温区进行加热,通过舱间断接器接入空间站中温内回路,再通过中温内回路上的换热器传递到空间站外回路,最终将热量通过空间站辐射器排向外太空;气闸舱流体回路不设置驱动泵、调节阀,仅设置补偿器和传感器,在接入到空间站中温内回路后,在中温内回路泵的驱动下使工质循环流动;照明与摄像子系统由舱内摄像机、舱外摄像机、舱内照明灯和舱外照明灯组成;舱内摄像机布局在气闸舱内部,拍摄双向货物转移滑台运动、内舱门开关、外舱门开关;舱外摄像机布局在双向直通式柱状主结构柱段外舱壁,拍摄双向货物转移滑台运动、外舱门开关、机械臂操作双向货物转移滑台上的暴露载荷;舱内照明灯布局在气闸舱内部,为航天员在舱内活动以及摄像机拍摄气闸舱内部状态时提供照明支持;舱外照明灯布局在双向直通式柱状主结构柱段外舱壁,为舱外摄像机拍摄双向货物转移滑台运动以及机械臂操作双向货物转移滑台上的暴露载荷提供照明支持;泄复压子系统包络泄压模块和复压模块两个功能模块;泄压模块由气体复用组件和泄压组件组成,泄压开始后利用气体复用组件将大部分气闸舱内空气复用至空间站密封舱;气体复用结束后,通过泄压组件将气闸舱残余空气排向外太空;复压模块由复压组件组成,复压开始后利用复压组件将空间站密封舱内空气排向气闸舱,实现气闸舱复压。
8、在上述的空间站在轨组装式货物气闸舱,所述通用停靠装置主动端为有源装置,安装在空间站外舱壁上;通用停靠装置主动端由结构环、导向板、捕获锁、电动螺栓和控制器组成;通用停靠装置被动端为无源装置,安装在钟罩式主结构前端框;由结构环、导向板、捕获锁适配器、螺母、密封圈组成;
9、结构环用于维持气闸舱与空间站密封舱间的密封加压通道,并提供停靠装置其他部件安装接口;
10、导向板用于主动端和被动端接近和捕获过程中以适当的方向配对,消除主动端与被动端相对位置和姿态偏差;
11、捕获锁与捕获锁适配器相配合,用于补偿由于机械臂控制精度和视觉误差导致的主动端和被动端对接法兰面的相对位置和姿态偏差;捕获和引导对接法兰靠近最终实现配对并保持配对位置;
12、电动螺栓与螺母相配合,为主动端和被动端建立结构刚性连接,并为密封圈提供必要的压紧力以保障其密封性;
13、控制器是电动螺栓控制器、捕获锁控制器以及电源模块的集合组件,实现电动螺栓和捕获锁驱动功能以及信号采集功能;
14、被动端上密封圈与主动端对接法兰密封面在电动螺栓作用下相互压紧,实现对接通道密封功能。
15、在上述的空间站在轨组装式货物气闸舱,所述内舱门为圆形舱门,开启方向朝向空间站密封舱内,满足待释放卫星进入气闸舱的通径要求。
16、在上述的空间站在轨组装式货物气闸舱,所述卫星释放装置包括导向机构、弹射机构、驱动机构和压紧机构;导向机构用于释放待释放卫星沿分离方向直线运动导向;驱动机构用于驱动解锁弹射机构;弹射机构用于弹射待释放卫星,使其达到分离初速度;压紧机构用于使弹射机构固定在压紧状态。
17、在上述的空间站在轨组装式货物气闸舱,用于卫星在轨释放的在轨组装式货物气闸舱在轨使用过程为:待释放卫星各零部件随货运飞船运抵空间站,航天员将待释放卫星各零部件转运至空间站密封舱,航天员在空间站密封舱完成待释放卫星组装,在地面人员与航天员协同配合下利用专用检测设备对待释放卫星完成出舱前检测,航天员打开气闸舱内舱门,航天员将待释放卫星安装在卫星释放装置上,航天员关闭内舱门,气闸舱泄压,机械臂抓取气闸舱上机械臂适配器,空间站通用停靠装置主动端与气闸舱上的通用停靠装置被动端解锁,机械臂转运气闸舱至卫星释放位置,机械臂对释放装置管理器供电、测控接口接通,在释放装置管理器控制下卫星释放装置实现待释放卫星弹射分离,机械臂将气闸舱转运至空间站舱外通用停靠装置主动端处,通用停靠装置主动端与气闸舱上的通用停靠装置被动端捕获并锁紧,机械臂释放气闸舱,空间站对气闸舱复压,航天员打开气闸舱内舱门并进入气闸舱。
18、在上述的空间站在轨组装式货物气闸舱,所述通用停靠装置主动端为有源装置,安装在空间站外舱壁上;通用停靠装置主动端由结构环、导向板、捕获锁、电动螺栓和控制器组成;通用停靠装置被动端为无源装置,安装在双向直通式柱状主结构前端框,由结构环、导向板、捕获锁适配器、螺母、密封圈组成;
19、结构环用于维持气闸舱与空间站密封舱间的密封加压通道,并提供停靠装置其他部件安装接口;导向板用于主动端和被动端接近和捕获过程中以适当的方向配对,消除主动端与被动端相对位置和姿态偏差;捕获锁与捕获锁适配器相配合,用于补偿由于机械臂控制精度和视觉误差导致的主动端和被动端对接法兰面的相对位置和姿态偏差;捕获和引导对接法兰靠近最终实现配对并保持配对位置;电动螺栓与螺母相配合,为主动端和被动端建立结构刚性连接,并为密封圈提供必要的压紧力以保障其密封性;控制器是电动螺栓控制器、捕获锁控制器以及电源模块的集合组件,实现电动螺栓和捕获锁驱动功能以及信号采集功能;被动端上密封圈与主动端对接法兰密封面在电动螺栓作用下相互压紧,实现对接通道密封功能。
20、在上述的空间站在轨组装式货物气闸舱,所述门舱门为圆形舱门,开启方向朝向空间站密封舱内,满足双向货物转移滑台的伸缩机构伸入空间站密封舱且携带暴露载荷转移的通径要求。
21、在上述的空间站在轨组装式货物气闸舱,所述双向货物转移滑台的机械模块由滑台底座、双向伸缩机构、双向位置调整机构共3部分组成;滑台底座用于支撑双向伸缩机构,一侧与气闸舱壁板连接,另一侧与双向伸缩机构连接;双向伸缩机构分上、下两层板,上层板与下层板之间利用滚珠丝杠实现精确的相对滑动,进而实现伸缩运动;位置调整机构集成在上层板上,位置调整机构与上层板之间利用滚珠丝杠实现精确相对滑动,带动安装在位置调整机构上的暴露载荷移动,进而实现暴露载荷出舱位置的调节。
22、在上述的空间站在轨组装式货物气闸舱,所述用于暴露载荷进出密封舱的在轨组装式货物气闸舱在轨组装建造过程为:
23、气闸舱安装在开放式货运飞船货舱内发射上行,货运飞船对气闸舱供电、测控接口接通并控制其保温,货运飞船与空间站对接形成组合体,空间站机械臂抓取气闸舱上的机械臂适配器;货运飞船断开与气闸舱供电、测控接口,货运飞船解锁与气闸舱之间的上行固定支架,空间站机械臂对气闸舱供电、测控接口接通并控制其保温;空间站机械臂将气闸舱从货运飞船货舱内取出并转运至空间站舱外通用停靠装置主动端处,通用停靠装置主动端与气闸舱上的通用停靠装置被动端捕获并锁紧;空间站机械臂对气闸舱供电、测控接口断开,空间站机械臂释放气闸舱,空间站对气闸舱供电、信息、热控流体回路接通,气闸舱进行主动热控控制,空间站对气闸舱复压,航天员打开气闸舱内舱门并进入气闸舱;
24、用于暴露载荷进出密封舱的在轨组装式货物气闸舱在轨撤收过程为组装建造过程的逆过程。
25、在上述的空间站在轨组装式货物气闸舱,所述暴露载荷通过气闸舱出舱过程为:
26、航天员打开气闸舱内舱门,双向货物转移滑台伸入空间站密封舱内;航天员将暴露载荷安装在双向货物转移滑台上;双向货物转移滑台缩回至气闸舱内,航天员关闭内舱门,气闸舱泄压且外舱门自动打开,双向货物转移滑台伸向外太空并将暴露载荷送出舱外,机械臂抓取暴露载荷,机械臂对暴露载荷供电、测控接口接通,暴露载荷与双向货物转移滑台解锁,机械臂将暴露载荷从双向货物转移滑台上取下,机械臂将暴露载荷转运并安装至空间站舱外暴露实验平台,机械臂返回停泊构型,双向货物转移滑台缩回至气闸舱内,气闸舱外舱门自动关闭,气闸舱复压,航天员打开气闸舱内舱门并进入气闸舱;暴露载荷通过气闸舱回舱过程为出舱过程的逆过程。
27、本发明与现有技术相比的有益效果是:
28、(1)本发明的用于卫星在轨释放的在轨组装式货物气闸舱,可实现中大型卫星在空间站密封舱内组装、测试,并通过气闸舱出舱和在轨释放,有效提升卫星部署成功率,降低卫星研制成本;;
29、(2)本发明的用于暴露载荷进出密封舱的在轨组装式货物气闸舱,可实现货物气闸舱与空间站在轨组装,并可实现货物自动进出空间站密封舱,特别在货物气闸舱故障情况下可整体更换;
30、(3)本发明在轨组装式货物气闸舱,可实现货物气闸舱与空间站在轨组装,并可实现货物自动进出空间站密封舱,特别在货物气闸舱故障情况下可整体更换,大幅提升了空间站货物进出密封舱的效率,并有效提高了空间站货物自动进出密封舱任务的可靠性。
- 还没有人留言评论。精彩留言会获得点赞!