一种翼扑动平面可控的微型扑翼飞行器及其飞行控制方法
本发明提供一种翼扑动平面可控的微型扑翼飞行器及其飞行控制方法,属于微型飞行器领域。
背景技术:
1、微型扑翼飞行器是一类模仿自然界中的昆虫和鸟类的飞行过程的飞行器,与传统的微型固定翼和微型旋翼飞行器相比,微型扑翼飞行器具有更加高效的气动性能和更强的机动能力,目前已经成为微型飞行器的研制热点。微型扑翼飞行器通过往复扑动柔性翼产生克服自身重力的升力,此外部分微型扑翼飞行器通过调整柔性翼的扑动过程产生对应的控制力矩,进而实现微型扑翼飞行器的飞行控制。
2、现有的大多数无尾式微型扑翼飞行器通过改变柔性翼的翼根位置改变柔性翼的翼膜的张紧程度,进而改变柔性翼在一个扑动周期内迎角的变化规律,最终改变柔性翼产生气动力合力的大小和方向,产生微型扑翼飞行器所需的控制力矩;这种控制方式具有机械结构简单、容易实现的优点。专利“一种基于双翼差动及舵机重心变化实现高控制力矩产生的仿生扑翼微型飞行器”(申请公布号:cn 112009682 a)公开了一种微型扑翼飞行器,该飞行器通过上述改变柔性翼的翼根位置的方式产生气动力矩并实现飞行控制。在具体使用过程中,由于从改变柔性翼的翼根位置开始到柔性翼稳定地产生对应的控制力矩需要一定的时间,存在显著的气动延迟问题,极大地限制了微型扑翼飞行器的控制能力;同时,通过改变柔性翼的翼根位置产生控制力矩的方法产生控制力矩的能力较弱,容易存在控制力矩不足的问题。此外,通过改变柔性翼的根部位置产生控制力矩的方法存在耦合效应,即控制柔性翼同时产生俯仰、滚转和偏航力矩中的两个控制力矩的同时,柔性翼总会产生第三个不期望产生的控制力矩,例如柔性翼在产生期望的俯仰和偏航力矩时,也会产生不期望出现的俯仰力矩,这一现象增大了微型扑翼飞行器的控制系统的设计难度。
3、考虑到现有的微型扑翼飞行器存在的问题,有必要设计一种新的微型扑翼飞行器,该微型扑翼飞行器采用新的控制方式快速有效地产生预期的控制力矩,同时该微型扑翼飞行器产生的控制力矩满足飞行控制需要,使微型扑翼飞行器控制系统的设计更加简单。
技术实现思路
1、现有的微型扑翼飞行器在飞行控制过程存在气动延迟、控制力矩不足、产生的控制力矩具有耦合效应、控制系统设计难度高的问题。为解决上述问题,本发明提出了一种翼扑动平面可控的微型扑翼飞行器及其飞行控制方法,一种翼扑动平面可控的微型扑翼飞行器通过转动柔性翼的扑动平面和电机转速的方式直接改变柔性翼产生气动合力的方向和大小,能够快速地产生飞行器所需的控制力矩,避免了控制力矩耦合产生的情况,使控制系统的设计更加简单。
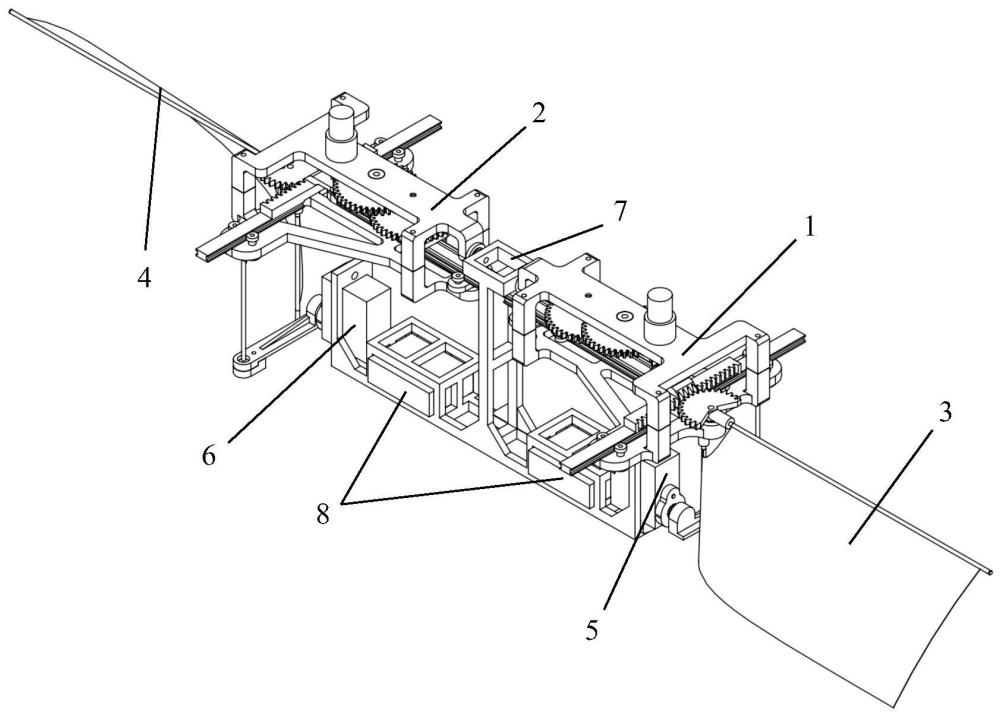
2、所述一种翼扑动平面可控的微型扑翼飞行器,包括两套传动机构、两个柔性翼、两套控制机构、连接支架和电池。由于一种翼扑动平面可控的微型扑翼飞行器左右两侧的传动机构、柔性翼、控制机构与连接支架的安装关系完全一致,因此只介绍一侧的结构组成。
3、所述传动机构包括上底座、下底座、减速齿轮组、运动滚轮座、固定滚轮座、摆杆、滑槽齿条、滚子轴承、输出齿轮、电机、球形铰链固定座、轴承、含油轴承和翼根固定杆。
4、所述上底座为空间立体结构,从功能上分为电机安装区、齿轮安装区,支架连接区和上底座支撑结构。电机安装区包含圆柱套筒和安装挡板,圆柱套筒的内侧直径略大于电机外径,用于电机安装;安装挡板在圆形套筒中,用于限制电机的安装位置,同时安装挡板上具有圆形通孔,用于避开电机和电机齿轮。齿轮安装区包含双层齿轮安装孔和单层齿轮安装孔,分别用于安装减速齿轮组的双层齿轮和单层齿轮,两个齿轮安装孔上同时具有安装轴承的圆柱凹槽,用于安装轴承。支架连接区为一个空间“l”形结构,其上具有转轴安装孔和用于安装轴承的圆柱凹槽,支架连接区用于将上底座安装到连接支架上,使传动机构能绕着连接支架转动。上底座支撑结构是从上底座延伸出的四个方形凸台,其中两个方形凸台上有具有圆柱凹槽,两个方形凸台上具有圆柱凸台,上底座支撑结构的作用是与下底座固定连接,同时为传动机构的其他零部件提供安装空间。
5、所述下底座为空间立体结构,从功能上分为滚子轴承安装区、固定滚轮座安装区、输出齿轮安装区、翼根固定杆安装区、控制机构安装区和下底座支撑结构。滚子轴承安装区具有四个带有转轴安装孔的圆柱凸台,用于安装滚子轴承,滚子轴承用于限制滑槽齿条在直线上往复运动。固定滚轮座安装区具有用于安装固定滚轮座的转轴安装孔和安装轴承的圆柱凹槽。输出齿轮安装区具有用于安装输出齿轮的转轴安装孔和用于安装轴承的圆柱凹槽。翼根固定杆安装区具有空心圆柱,翼根固定杆插入空心圆柱中,翼根固定杆插入双稳态柔性的翼根套筒中。控制机构安装区位于下底座的左右两侧,每侧各具有两个转轴安装孔和半球形凹槽,其中两个转轴安装孔用于安装球形铰链固定座,半球形凹槽用于配合安装控制机构中的球形铰链杆,在实际装配时只在左侧安装球形铰链固定座。下底座支撑结构是从下底座延伸出的四个方形凸台,其中两个方形凸台上有具有圆柱凸台,与上底座具有圆柱凹槽的方形凸台配合,另外两个方形凸台上具有圆柱凹槽,与上底座具有圆柱凸台的方形凸台配合,同时为传动机构的其他零部件提供安装空间。
6、所述减速齿轮组包括电机齿轮、双层齿轮和单层齿轮。所述电机齿轮安装在电机的转轴上,所述双层齿轮通过上底座的双层齿轮安装孔安装在上底座上,所述单层齿轮通过上底座的单层齿轮安装孔安装在上底座上,所述单层齿轮上具有安装运动滚轮座的转轴安装孔和安装含油轴承的圆柱凹槽。所述电机齿轮与双层齿轮的大齿数齿轮啮合,双层齿轮的小齿数齿轮和单层齿轮啮合。
7、所述运动滚轮座安装在单层齿轮上,随着单层齿轮的转动而运动,因此将其称为运动滚轮座,与安装在下底座上的固定滚轮座区分。所述运动滚轮座包括转动底座和两个滚子轴承。所述转动底座上具有直径较大的转轴安装孔和两个具有转轴安装孔的圆柱凸台,以及用于安装含油轴承的圆柱凹槽,其中直径较大的圆形安装孔用于将运动滚轮座安装至单层齿轮上,两个具有转轴安装孔的圆柱凸台用于安装滚子轴承。
8、所述固定滚轮座安装在下底座上,包括转动底座和两个滚子轴承。所述转动底座上具有直径较大的转轴安装孔和两个具有转轴安装孔的圆柱凸台,其中直径较大的转轴安装孔用于将运动滚轮座安装至下底座上,两个具有转轴安装孔的圆柱凸台用于安装滚子轴承。所述摆杆从功能上分为滑槽区和齿条连接区。滑槽区左右两侧具有与运动滚轮座和固定滚轮座的滚子轴承配合的凹槽。单层齿轮转动时会带动运动滚轮座转动,运动滚轮座驱动摆杆摆动。齿条连接区具有转轴安装孔和用于安装轴承的圆柱凹槽,用于将摆杆与滑槽齿条连接,使得摆杆的一端能够绕滑槽齿条转动。
9、所述滑槽齿条从功能上分为摆杆连接区、滑槽区和齿条区。摆杆连接区具有转轴安装孔,用于将滑槽齿条安装在摆杆上。滑槽区具有四处凹槽,与安装在下底座上的四个滚子轴承配合。齿条区具有与输出齿轮配合的齿条,用于驱动输出齿轮往复转动。
10、所述输出齿轮包括往复齿轮和驱动杆。往复齿轮上包括转轴安装孔、部分齿轮和空心圆柱杆。输出齿轮通过转轴安装孔安装在下底座上。部分齿轮与滑槽齿条的齿条啮合,将滑槽齿条的直线往复运动转化为输出齿轮往复转动。驱动杆插入进空心圆柱中,当输出齿轮往复转动时驱动杆随之往复摆动。
11、所述电机为圆柱形空心杯电机,安装在上底座的电机安装区的圆柱套筒中。电机驱动传动机构运动,完整的驱动过程为:电机的转轴转动时,安装在电机上的电机齿轮驱动减速齿轮组的其它齿轮转动,减速齿轮组中的单层齿轮驱动其上安装的运动滚轮座转动;运动滚轮座驱动摆杆摆动,摆杆带动与之连接的滑槽齿条在一条直线上往复运动,往复运动的滑槽齿条驱动输出齿轮往复转动,带动其上的驱动杆往复摆动。
12、所述球形铰链固定座上具有两个转轴安装孔、一个半球形凹槽和一个圆形通孔。其中两个转轴安装孔分别与下底座左侧的控制机构安装区的两个转轴安装孔的配合,用于将球形铰链固定座固定安装在下底座上;半球形凹槽与下底座左侧的半球形凹槽共同配合形成一个球形凹槽,并与圆形通孔配合,用于将控制机构中的球形铰链杆的一端安装在下底座上。
13、所述柔性翼包括翼膜、翼脉、前缘套筒和翼根套筒,其中翼膜采用聚合物薄膜材料;翼脉为碳纤维复合材料薄片制作,前缘套筒和翼脉套筒分别由翼膜的前缘和根部卷曲粘贴得到。将柔性翼安装到传动机构上时,需要将输出齿轮上的驱动杆插入前缘套筒,将下底座上的翼根固定杆插入翼根套筒。当传动机构中的电机转轴转动时驱动传动机构中的输出齿轮往复转动,输出齿轮上的驱动杆带动柔性翼往复扑动以产生气动力。
14、所述控制机构包括舵机、舵机臂和球形铰链杆。舵机安装在连接支架上,用于驱动舵机臂转动。舵机臂包括主舵机臂和球形铰链安装座,主舵机臂通过安装凹槽安装在舵机上,球形铰链安装座通过主舵机臂和球形铰链固定座上的铆钉安装孔安装在主舵机臂上。通过主舵机臂上的半球形凹槽、圆形通孔,球形铰链安装上的半球形凹槽,可以将球形铰链杆的一端安装在舵机臂外侧。球形铰链杆的两侧为球形,中间为细长直杆,球形铰链杆的两端分别安装在舵机臂和下底座上。当舵机带动舵机臂转动时,舵机臂牵引球形铰链杆带动传动机构绕连接支架转动,进而改变柔性翼的扑动平面。
15、所述连接支架为空间立体结构,从功能上分为传动机构安装区、舵机安装区和电池安装区。传动机构安装区域位于连接支架上方,在传动机构安装区域的左右两侧分别有两个圆形安装孔,分别用于在连接支架的左右两侧安装和传动机构。舵机安装区位于连接支架下方左右两侧,两侧的舵机安装区均具有一个方形安装孔和两个圆形安装孔,用于在连接支架左右两侧分别安装舵机。电池安装区位于连接支架下方的左右两侧,用于安装电池。安装电池后整个飞行器的重心下移,有利于飞行器实施俯仰控制。
16、所述电池安装在连接支架上,用于向传动机构中的电机输出电能。
17、所述一种翼扑动平面可控的微型扑翼飞行器俯仰控制的实施过程为:
18、(1)当飞行器需要产生抬头俯仰力矩时,安装在连接支架左侧和右侧的舵机分别驱动各自的舵机臂向下和向上转动,舵机臂牵引球形铰链杆转动传动机构,使左右两侧的柔性翼的扑动平面均向飞行器后方倾斜,两个柔性翼扑动产生的气动合力产生水平向后的分量。由于飞行器的重心位于飞行器的下侧,且柔性翼产生气动力的位置高于飞行器重心位置,因此产生抬头俯仰力矩。
19、(2)当飞行器需要产生低头俯仰力矩时,安装在连接支架左侧和右侧的舵机分别驱动各自的舵机臂向上和向下转动,舵机臂牵引球形铰链杆转动传动机构,使左右两侧的柔性翼的扑动平面均向飞行器前方倾斜,两个柔性翼扑动产生的气动合力产生水平向前的分量。由于飞行器的重心位于飞行器的下侧,且柔性翼产生气动力的位置高于飞行器重心位置,因此产生低头俯仰力矩。
20、所述一种翼扑动平面可控的微型扑翼飞行器滚转控制的实施过程为:
21、(1)当飞行器需要产生左滚转力矩时,左侧传动机构的电机转速降低,左侧柔性翼扑动产生的升力减小,右侧传动机构的电机转速提高,右侧柔性翼扑动产生的升力增大,由于左右两侧传动机构提供的升力不一致,因此产生向左的滚转力矩。
22、(2)当飞行器需要产生右滚转力矩时,左侧传动机构的电机转速提高,左侧柔性翼扑动产生的升力增大,右侧传动机构的电机转速降低,右侧柔性翼扑动产生的升力减小,由于左右两侧传动机构提供的升力不一致,因此产生向右的滚转力矩。
23、所述一种翼扑动平面可控的微型扑翼飞行器偏航控制的实施过程为:
24、(1)当飞行器需要产生左偏航力矩时,安装在连接支架左侧和右侧的舵机均驱动各自的舵机臂向下转动,舵机臂牵引球形铰链杆转动传动机构,使左侧的柔性翼的扑动平面均向飞行器后方倾斜,左侧的柔性翼产生水平向后的气动力分量,使右侧的柔性翼的扑动平面均向飞行器前方倾斜,右侧的柔性翼产生水平向前的气动力分量,两侧的水平分量共同产生左偏航力矩。
25、(2)当飞行器需要产生右偏航力矩时,安装在连接支架左侧和右侧的舵机均驱动各自的舵机臂向上转动,舵机臂牵引球形铰链杆转动传动机构,使左侧的柔性翼的扑动平面均向飞行器前方倾斜,左侧的柔性翼产生水平向前的气动力分量,使右侧的柔性翼的扑动平面均向飞行器后方倾斜,右侧的柔性翼产生水平向后的气动力分量,两侧的水平分量共同产生右偏航力矩。
26、本发明的优点在于:一种翼扑动平面可控的微型扑翼飞行器,通过改变柔性翼的扑动平面和电机转速的方式产生控制力矩,简化了产生控制力矩的过程,提高了微型扑翼飞行器产生控制力矩的速度和能力,降低了微型扑翼飞行器控制系统的设计难度。
- 还没有人留言评论。精彩留言会获得点赞!