无人飞机的搬运系统的制作方法
本发明涉及无人飞机的搬运系统。
背景技术:
1、已知无人飞机的搬运系统。日本特开2021-20529号公报(专利文献1)中公开了搬运物品的无人飞机的搬运系统。
2、专利文献1中公开的搬运系统的无人飞机沿商用电力的电线路飞行,利用在电线路流动的商用电力充电。因此,在充电的期间无人飞机的移动中断。特别地,在搬运作为重量物的物品的情况下无人飞机的充电次数增加。此外,在屋内、屋外存在禁飞区域的情况下,无人飞机需要绕过该区域。由于这些原因,有物品、无人飞机的搬运效率变低的问题。
技术实现思路
1、因此,希望实现搬运效率高的搬运系统。
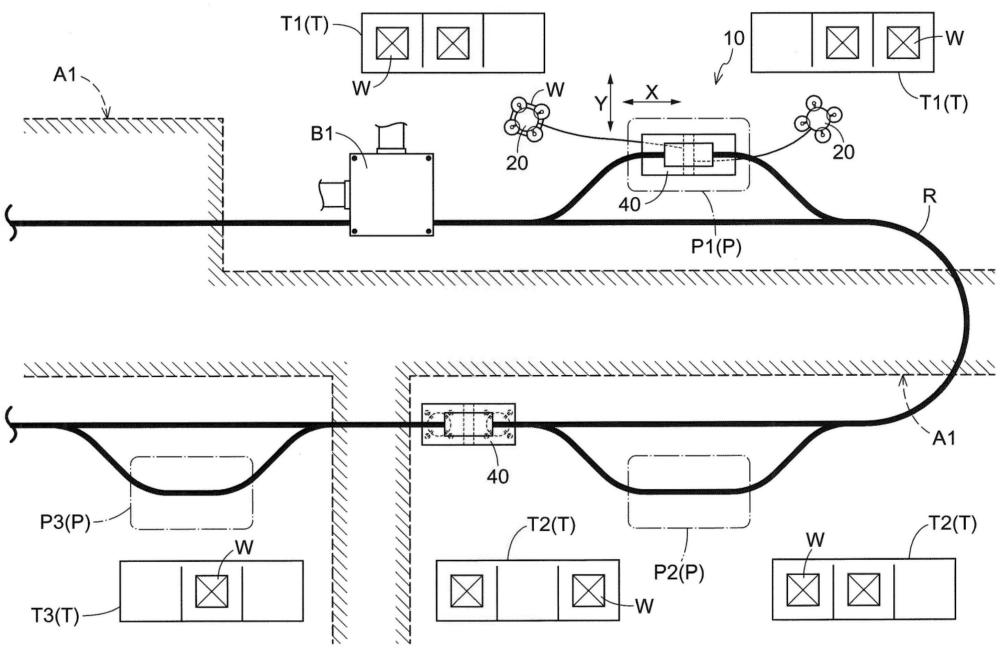
2、本申请的搬运系统具备无人飞机、搬运车、控制装置,前述搬运车具备保持前述无人飞机的飞机保持部,沿规定的行进路径行进,前述控制装置控制前述无人飞机及前述搬运车,前述控制装置对前述搬运车及保持于该搬运车的前述无人飞机的双方输出指定前述无人飞机的目的地的移动指令,接收到了前述移动指令的前述搬运车行进至前述行进路径上的与前述目的地对应地设定的停止位置即对应停止位置,停止于前述对应停止位置,前述无人飞机在前述搬运车停止于前述对应停止位置的状态下,从前述飞机保持部起飞,向前述目的地移动。
3、根据本结构,能够借助搬运车将无人飞机搬运至与目的地对应的对应停止位置,无人飞机能够从该对应停止位置飞行至目的地。因此,例如,借助无人飞机和搬运车搬运重量物的情况下能够削减无人飞机的飞行距离、飞行时间。此外,例如也能够借助搬运车将多个无人飞机汇总搬运,在无人飞机不能飞行的区间也能够利用搬运车使无人飞机移动。因此,能够使物品、无人飞机的搬运效率变高。此外,即使在未设定行进路径的场所成为目的地的情况下也能够借助无人飞机到达至目的地,所以无需将搬运车的行进路径设置成接近设想的所有目的地,由此能够减少行进路径的设置费用。此外,在搬运车停止在对应停止位置的状态下无人飞机起飞,所以容易高精度地进行自动飞行的无人飞机的起飞。
技术特征:
1.一种无人飞机的搬运系统,其特征在于,
2.如权利要求1所述的无人飞机的搬运系统,其特征在于,
3.如权利要求1所述的无人飞机的搬运系统,其特征在于,
4.如权利要求1所述的无人飞机的搬运系统,其特征在于,
5.如权利要求1至4中任一项所述的无人飞机的搬运系统,其特征在于,
6.如权利要求1至4中任一项所述的无人飞机的搬运系统,其特征在于,
技术总结
本发明具备控制无人飞机(20)及搬运车(40)的控制装置,控制装置相对于搬运车(40)及保持于该搬运车(40)的无人飞机(20)的双方输出指定无人飞机(20)的目的地(T1)的移动指令,接收到移动指令的搬运车(40)行进至行进路径(R)上的与目的地(T1)对应地设定的停止位置即对应停止位置(P1)并停止于对应停止位置(P1),无人飞机(20)在搬运车(40)停止于对应停止位置(P1)的状态下从飞机保持部起飞,向目的地(T1)移动。
技术研发人员:高桥丰树,武野敬辅,新田聪,福岛秀基
受保护的技术使用者:株式会社大福
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!