一种氢能驱动的长航时无人飞行器的制作方法
本发明涉及飞行器,更具体地讲,涉及一种氢能驱动的长航时无人飞行器。
背景技术:
1、临近空间飞行器由于具有强的机动性、隐蔽性,搭配适宜的动力组合,可实现超长时间续航和大载荷,因而在通讯、信息对抗、空间攻防、天气环境监测等领域中占据重要地位。因此,能够长航时飞行的无人飞行器平台,可以用于搭载远程通讯、天气环境监测等多种应用临近空间应用设备,有广阔的市场前景。
2、长航时飞行器的开发面临的主要问题包括,作为临近空间飞行器的“心脏”,在太阳能电池单一动力源条件下,全天候稳定飞行需要超过400wh/kg的,这远远超出了当前太阳能电池材料的储能密度极限。氢能系统能量密度高,能够解决无人飞行器能源系统比能量低的问题,将氢能与太阳能组合可进一步延长无人飞行器航时。进一步地,通过优化飞行器舱体结构和储氢系统的优化设计,能够增加机载氢燃料量,进一步延长无人飞行器航时。
3、临近空间为高度10km-100km的空域,空气稀薄、气温低,环境条件差,这是链接空间飞行器面临的另一个问题;满足长航时飞行的关键是将足够量的氢、氧随无人飞行器带上临近空间。
4、目前有多种大容量储氢方式,例如固态氢化物储存、液氢罐储存、气态高压储存等多种方式。但现有技术储存的氢量也有限,维持不了氢能无人飞行器的长航时飞行。
技术实现思路
1、本发明所要解决的技术问题是,提供一种氢能驱动的长航时无人飞行器;
2、本发明解决技术问题所采用的解决方案是:
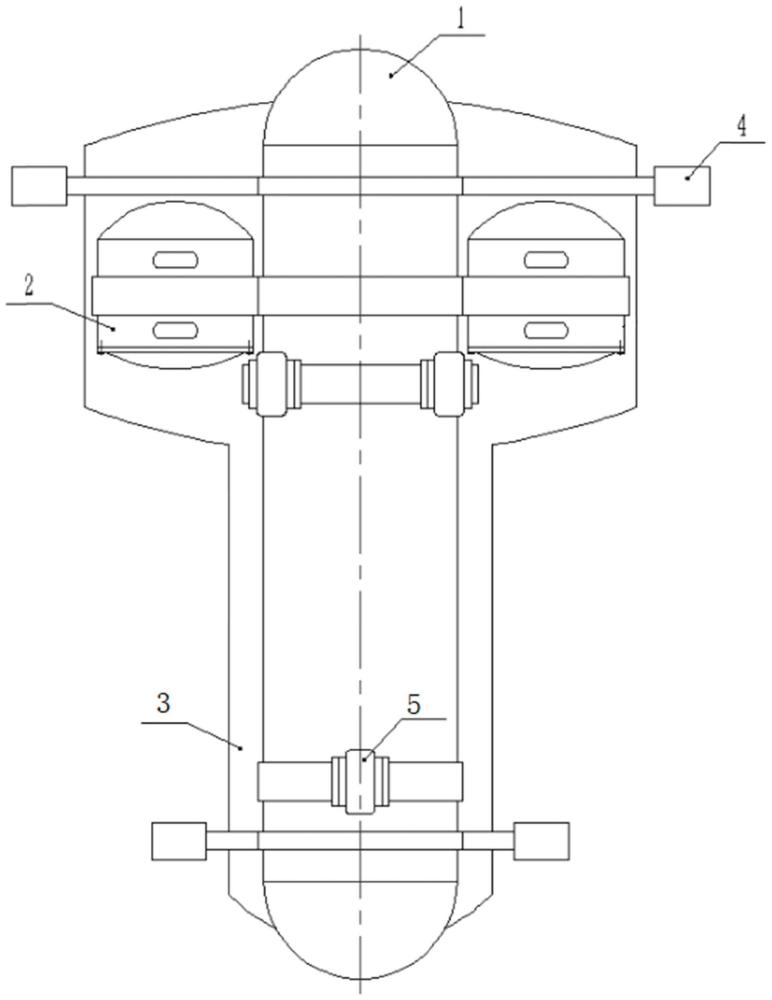
3、一种氢能驱动的长航时无人飞行器,包括机翼、设置在机翼底部且沿航向对称设置的两组设备舱、位于两组设备舱之间且作为储氢压力容器的飞行舱、设置在其中一组设备舱内且与飞行舱连接的氢能供能系统和与氢能供能系统连接的制氧系统、以及设置在另外一组设备舱内的飞行机载系统和设备舱压力调控系统。
4、在一些可能的实施方式中,
5、所述氢能供能系统包括氢燃料电池系统、与氢燃料电池系统连接且为氢燃料电池系统提供氢气的供氢系统,所述供氢系统与飞行舱连接。
6、在一些可能的实施方式中,
7、所述供氢系统包括与飞行舱连接的自动控阀、与自动控阀连接的转移泵、与转移泵和氢燃料电池系统分别连接的自控阀、设置在自动控阀与转移泵的连接管道上的氢气压力传感器、与转移泵并联的减压阀、以及分别与氢气压力传感器、转移泵、减压阀、自控阀连接的氢气控制模块。
8、在一些可能的实施方式中,
9、所述转移泵的最低入口压力小于10kpa,出口压力大于0.5mpa,气体泄漏率<1×10-7pa.m3.s-1。
10、在一些可能的实施方式中,
11、所述设备舱压力调控系统包括充氢罐、设置在该设备舱外侧的第一压力传感器、设置在设备舱内的第二压力传感器、分别与充氢罐连通的第三放氢电磁阀和第四充氢电磁阀、以及分别与第一压力传感器、第二压力传感器、第三放氢电磁阀和第四充氢电磁阀连接的控制模块;
12、所述第三放氢电磁阀的放气口与设备舱外侧连通;所述第四充氢电磁阀位于设备舱内且与设备舱内部连通。
13、在一些可能的实施方式中,
14、所述设备舱、飞行舱均采用碳纤维材料制成;
15、所述设备舱包括薄壁壳体、安装在薄壁壳体外侧且与机翼连接的设备舱连接板、设置在薄壁壳体内且与薄壁壳体连接形成安装腔的安装支架、与薄壁壳体远离安装腔一侧连接且与壳体配合形成密封腔室的盖板;
16、所述安装支架位于密封腔室内且与壳体之间密封连接。
17、在一些可能的实施方式中,
18、所述飞行舱的容积为5m3-30m3,其工作压力5mpa-30mpa,气体泄漏率<1×10-7pa.m3.s-1;
19、所述飞行舱的外压承受能力为δp,δp=p外压-p内压>0.15mpa;
20、其中,p外压为飞行舱的外侧的压力,p内压为飞行舱的内侧的压力。
21、在一些可能的实施方式中,
22、在所述飞行舱的外侧设置有用于连接机翼的机翼连接板、滑行轮组件连接板、旋翼推进器连接板、以及与供氢系统连接的气体导管。
23、在一些可能的实施方式中,
24、所述制氧系统包括与氢燃料电池系统连接且用于对氢燃料电池系统进行氧气供给的氧气分离组件、与氧气分离组件连接的加热组件、与加热组件连接的气体泵、设置在氧气分离组件与氢燃料电池系统之间的氧气浓度检测传感器、以及与氧气分离组件、氧气浓度检测传感器连接的制氧控制模块。
25、在一些可能的实施方式中,
26、所述氧气分离组件为分子筛氧分离装置;
27、所述分子筛氧分离装置包括至少两组并联且分别与气体泵连接的分子筛氧分离件;所述分子筛氧分离件的另外一端与氢燃料电池系统的氧气入口连通。
28、与现有技术相比,本发明的有益效果:
29、本发明将无人飞行器的飞行舱作为一个储氢压力容器,将飞行器的其他系统全都围绕储氢压力容器布设;与现有技术中的70mpa高压储氢罐方式比较,储存氢量更大,能够满足无人飞行器长航时飞行对氢燃料的需求;同时,当飞行舱内的高压氢消耗后返回地面过程中,储氢容器在空气中会提供额外的浮力,有助于无人飞行器的平稳降落;
30、本发明使得能够在临近空间低温、低气压下环境条件进行制氧,解决了临近空间温度低、大气压力低,可能导致氢燃料电池能量输出不稳定问题;
31、本发明中飞行舱、设备舱采用高强度碳纤维制造;由于碳纤维强度、弹性模高、重量轻,用该材料制造的飞行舱或设备舱强度高、壳体刚性好,重量轻;通过轻量化设计,提高了飞行器的有限载荷;
32、本发明通过在装载有飞行机载系统的设备舱内,安装设备舱压力自动调控系统,实现了对该设备舱气体压力的调控,确保了设备舱气体压力高于外部环境大气压力,且压力差在允许的设计范围之内,以维持设备舱的刚性;采用上述设置通过密封结构减小了设备舱内、外气体的热量交换,有利于飞行机载系统的保温作用,提升了飞行机载系统在临近空间的低温环境适应性;
33、本发明与无人飞行器投送系统组合使用,能够快速、机动地将本无人飞行器投送到临近空间,再自主飞行。
技术特征:
1.一种氢能驱动的长航时无人飞行器,其特征在于,包括机翼、设置在机翼底部且沿航向对称设置的两组设备舱、位于两组设备舱之间且作为储氢压力容器的飞行舱、设置在其中一组设备舱内且与飞行舱连接的氢能供能系统和与氢能供能系统连接的制氧系统、以及设置在另外一组设备舱内的飞行机载系统和设备舱压力调控系统。
2.根据权利要求1所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述氢能供能系统包括氢燃料电池系统、与氢燃料电池系统连接且为氢燃料电池系统提供氢气的供氢系统,所述供氢系统与飞行舱连接。
3.根据权利要求2所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述供氢系统包括与飞行舱连接的自动控阀、与自动控阀连接的转移泵、与气体转移泵和氢燃料电池系统分别连接的自控阀、设置在自动控阀与气体转移泵的连接管道上的氢气压力传感器、与气体转移泵并联的减压阀、以及分别与氢气压力传感器、气体转移泵、减压阀、自控阀连接的氢气控制模块。
4.根据权利要求3所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述转移泵的最低入口压力小于10kpa,出口压力大于0.5mpa,气体泄漏率<1×10-7pa.m3.s-1。
5.根据权利要求1所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述设备舱压力调控系统包括充氢罐、设置在该设备舱外侧的第一压力传感器、设置在设备舱内的第二压力传感器、分别与充氢罐连通的第三放氢电磁阀和第四充氢电磁阀、以及分别与第一压力传感器、第二压力传感器、第三放氢电磁阀和第四充氢电磁阀连接的控制模块;
6.根据权利要求1所述的一种氢能驱动的长航时无人飞行器,其特征在于,两组所述设备舱结构相同;
7.根据权利要求1所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述飞行舱的容积为5m3-30m3,其工作压力5mpa-30mpa,气体泄漏率<1×10-7pa.m3.s-1;
8.根据权利要求1所述的一种氢能驱动的长航时无人飞行器,其特征在于,在所述飞行舱的外侧设置有用于连接机翼的机翼连接板、滑行轮组件连接板、旋翼推进器连接板、以及与供氢系统连接的气体导管。
9.根据权利要求2所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述制氧系统包括与氢燃料电池系统连接且用于对氢燃料电池系统进行氧气供给的氧气分离组件、与氧气分离组件连接的加热组件、与加热组件连接的气体泵、设置在氧气分离组件与氢燃料电池系统之间的氧气浓度检测传感器、以及与氧气分离组件、氧气浓度检测传感器连接的制氧控制模块。
10.根据权利要求9所述的一种氢能驱动的长航时无人飞行器,其特征在于,所述氧气分离组件为分子筛氧分离装置;
技术总结
本发明涉及飞行器技术领域,具体公开了一种氢能驱动的长航时无人飞行器,包括机翼、设置在机翼底部且沿航向对称设置的两组设备舱、位于两组设备舱之间且作为储氢压力容器的飞行舱、设置在其中一组设备舱内且与储氢压力容器连接的氢能供能系统和与氢能供能系统连接的制氧系统、以及设置在另外一组设备舱内的飞行机载系统和设备舱压力调控系统。本发明储存氢量更大,储氢比容量更大,可满足长航时无人飞行器对氢燃料加载量的要求;储氢压力容器在空气中会提供额外的浮力,有助于无人飞行器的平稳降落;通过设备舱压力调控系统,实现设备舱内部压力调节,以维持设备舱的刚性,提升了飞行机载系统在临近空间的低温环境适应性。
技术研发人员:罗德礼,刘彤
受保护的技术使用者:中物院成都科学技术发展中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!