一种电动无人自转旋翼机的制作方法
本发明涉及旋翼机,更具体地说,涉及一种电动无人自转旋翼机。
背景技术:
1、自转旋翼机是一种利用前飞时的相对气流吹动旋翼自转以产生升力的旋翼类航空器。起飞时,预旋机构可以使旋翼先达到一定的转速,提供部分升力以缩短起飞距离。飞行时,位于机身后部的推进螺旋桨提供前进动力;尾翼的舵面提供偏航力矩;机身顶部的自转旋翼提供飞行升力和俯仰、滚转姿态操纵力矩。得益于其独特的飞行原理和结构特点,自转旋翼机与固定翼和直升机相比结构更加简单,安全性也更高,同时也可短距起降。
2、当下主流的自转旋翼机的基本构造包括机身、起落装置、旋翼系统、预旋系统、操纵系统、尾翼、动力装置和座舱仪表。其动力装置多采用航空发动机,而航空发动机作为内燃机不可避免的具有效率低的缺点,此外,发动机在运行过程中会产生很大的振动和噪声,其排放的尾气也会对空气造成污染。
3、此外,自转旋翼机的预旋系统动力来源均依靠后置的动力装置——航空发动机。这就需要通过皮带轮、差速器、传动轴等一系列零部件来将动力传输至旋翼,大大增加了结构的复杂程度和整体重量。
4、再者,目前自转旋翼机的驾驶方式多为有人驾驶,相较于无人驾驶,有人驾驶存在着一些缺点。比如在夜间或低能见度条件下无法开展飞行活动,长时间飞行时飞行员会疲劳,安全性低,运行成本高等。
技术实现思路
1、本发明的目的在于提供一种新型电动无人自转旋翼机,用以解决上述背景技术中存在的技术问题。
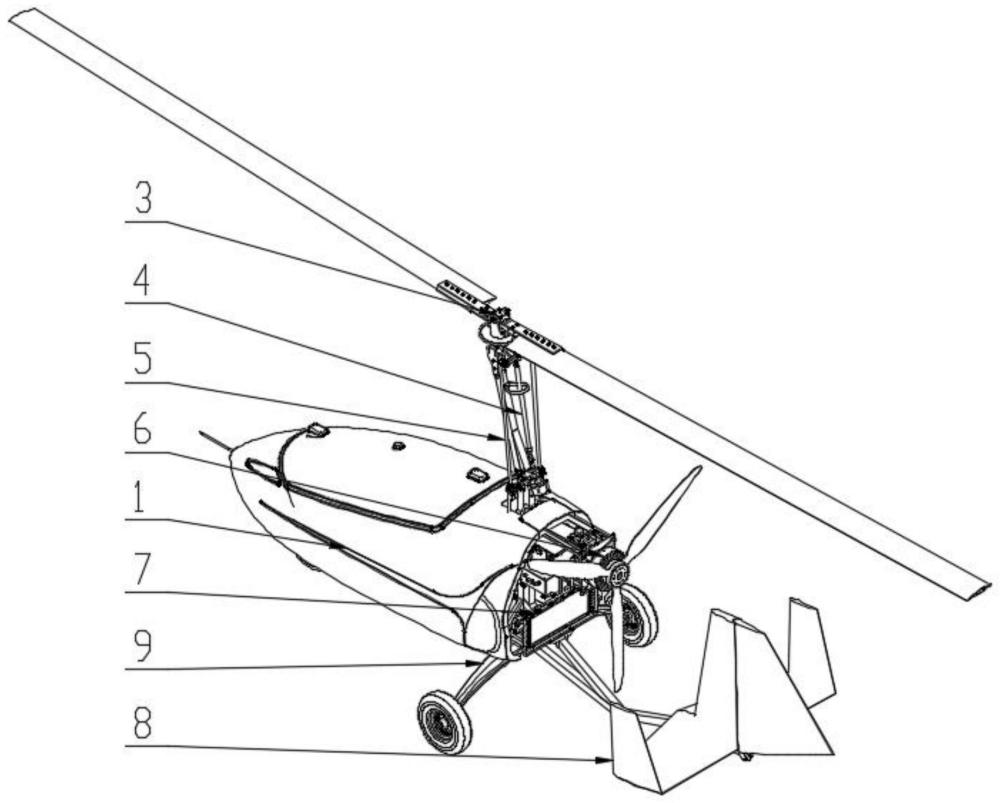
2、本发明技术方案提供一种新型电动无人自转旋翼机,包括包括有机身,安装在机身内部的航电系统,安装于机身上部的旋翼系统,与旋翼系统相连的预旋系统和操纵系统,安装于机身尾部支架上的动力系统和散热系统,安装在机身最后侧的尾翼以及安装在机身下部的起落架系统;
3、所述预旋系统采用电动预旋方式,所述预旋系统包括依次连接设置的预旋电机、联轴器、减速器、万向、传动杆、桨盘,所述浆盘通过所述操作熊控制俯仰与横滚;
4、所述动力系统为纯电驱动,所述动力系统包括电机、电调和桨叶,且所述电机和电调为液冷形式,所述桨叶为推力三叶桨。
5、在一个优选地实施例中,所述机身主体骨架为不锈钢材焊接机身,机身壳体为流线型气动外形。
6、在一个优选地实施例中,所述航电系统包括测控系统、电气系统和导航飞控系统;所述测控系统用于实现对旋翼机的遥控、遥测、跟踪定位和信息传输;所述电气系统用于为动力系统以及机上各用电设备供电;所述导航飞控系统主要用于自主起降和航线飞行,以及接受地面人工遥控指令。
7、在一个优选地实施例中,所述旋翼系统为跷跷板式旋翼,所述旋翼系统包括2片桨叶,
8、在一个优选地实施例中,所述旋翼系统的翼型选用naca 8h12。
9、在一个优选地实施例中,所述操纵系统包括前轮转向操纵机构、主轮刹车操纵机构、旋翼操纵机构、方向舵操纵机构;所述前轮转向控制舵机位于前纵梁下方、前轮后方,操纵摇臂机械限位为±30°;所述旋翼操纵机构包含两个舵机,两个舵机对称布置于桅杆两侧。
10、在一个优选地实施例中,所以散热系统为水冷形式,所以散热系统包括蓄水箱、水泵、管路、冷排,所述散热系统通过水循环为动力系统散热。
11、在一个优选地实施例中,所述尾翼采用山字形尾翼,大垂直尾翼分为垂直安定面和方向舵两部分,安装在旋翼机尾梁的后部;两片小垂尾布置在左右两端;水平尾翼位于机体后部下。
12、在一个优选地实施例中,所述起落架系统采用前三点式布局,前起具备地面转向能力,主起采用复合材料制作。
13、本发明技术方案的有益效果是:
14、1本发明提供了一种新型电动无人自转旋翼机,具备自主短距起降和航线飞行能力,具有环境适应性强、成本低等优点。
15、2本发明动力系统采用纯电驱动,具有节能环保、效率高且低噪声和低振动等优点。
16、3本发明的预旋系统采用电动预旋技术,与传统旋翼预旋方式不同,电动预旋系统省去了复杂的机械传动机构,旋翼预旋的效率和平稳性、操控性都有很大的提高。
17、4本发明采用无人驾驶可远程无线控制,避免了有人驾驶时飞行员会疲劳的问题以及在恶劣环境下无法开展飞行活动的问题,提高了安全性和环境适应性。
技术特征:
1.一种新型电动无人自转旋翼机,其特征在于:包括包括有机身,安装在机身内部的航电系统,安装于机身上部的旋翼系统,与旋翼系统相连的预旋系统和操纵系统,安装于机身尾部支架上的动力系统和散热系统,安装在机身最后侧的尾翼以及安装在机身下部的起落架系统;
2.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述机身主体骨架为不锈钢材焊接机身,机身壳体为流线型气动外形。
3.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述航电系统包括测控系统、电气系统和导航飞控系统;所述测控系统用于实现对旋翼机的遥控、遥测、跟踪定位和信息传输;所述电气系统用于为动力系统以及机上各用电设备供电;所述导航飞控系统主要用于自主起降和航线飞行,以及接受地面人工遥控指令。
4.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述旋翼系统为跷跷板式旋翼,所述旋翼系统包括2片桨叶。
5.根据权利要求4所述的一种新型电动无人自转旋翼机,其特征在于:所述旋翼系统的翼型选用naca 8h12。
6.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述操纵系统包括前轮转向操纵机构、主轮刹车操纵机构、旋翼操纵机构、方向舵操纵机构;所述前轮转向控制舵机位于前纵梁下方、前轮后方,操纵摇臂机械限位为±30°;所述旋翼操纵机构包含两个舵机,两个舵机对称布置于桅杆两侧。
7.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所以散热系统为水冷形式,所以散热系统包括蓄水箱、水泵、管路、冷排,所述散热系统通过水循环为动力系统散热。
8.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述尾翼采用山字形尾翼,大垂直尾翼分为垂直安定面和方向舵两部分,安装在旋翼机尾梁的后部;两片小垂尾布置在左右两端;水平尾翼位于机体后部下。
9.根据权利要求1所述的一种新型电动无人自转旋翼机,其特征在于:所述起落架系统采用前三点式布局,前起具备地面转向能力,主起采用复合材料制作。
技术总结
本发明公开了一种新型电动无人自转旋翼机,包括包括有机身,安装在机身内部的航电系统,安装于机身上部的旋翼系统,与旋翼系统相连的预旋系统和操纵系统,安装于机身尾部支架上的动力系统和散热系统,安装在机身最后侧的尾翼以及安装在机身下部的起落架系统。本发明提供了一种新型电动无人自转旋翼机,具备自主短距起降和航线飞行能力,具有环境适应性强、成本低等优点。本发明动力系统采用纯电驱动,具有节能环保、效率高且低噪声和低振动等优点。本发明的预旋系统采用电动预旋技术,与传统旋翼预旋方式不同,电动预旋系统省去了复杂的机械传动机构,旋翼预旋的效率和平稳性、操控性都有很大的提高。
技术研发人员:毕越洋,宁虎,王江浩
受保护的技术使用者:安徽云翼航空技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!