一种车载无人机固定方法、系统、终端设备及存储介质与流程
本技术涉及无人机起降,尤其涉及一种车载无人机固定方法、系统、终端设备及存储介质。
背景技术:
1、无人机起降平台是一种用于起降无人机的设备,通常是平坦的、加固的平台,用于提供无人机起飞和降落的安全支持。这些平台可以是地面上的平台,也可以是水上、船上或高空中的平台。无人机起降平台通常具有防滑和防起飞的特性,以确保无人机在起飞和降落时不会移动或受到任何干扰。这种设备适用于各种应用场景,包括军事、民用等领域。
2、在实际应用中,车载无人机起降平台是一种安装在车辆上,用于快速部署和回收无人机的设备,它通常包括一个朝着天空的起降区域、控制系统、电源和通信设备等组件。
3、目前,车载无人机起降平台一般通过磁力吸附的方式将降落后的无人机固定在起降平台上,通过磁力吸附方式固定无人机时,可能会受到磁性不稳定的影响,即吸附力受到机身和外部环境的影响会发生变化,如果吸附过程不能及时调整,可能导致无人机摆动和脱附,出现相关安全问题,从而影响无人机在起降平台上的稳定性和安全性。
技术实现思路
1、为了提升无人机在车载无人机起降平台上的稳定性和安全性,本技术提供一种车载无人机固定方法、系统、终端设备及存储介质。
2、第一方面,本技术提供一种车载无人机固定方法,包括以下步骤:
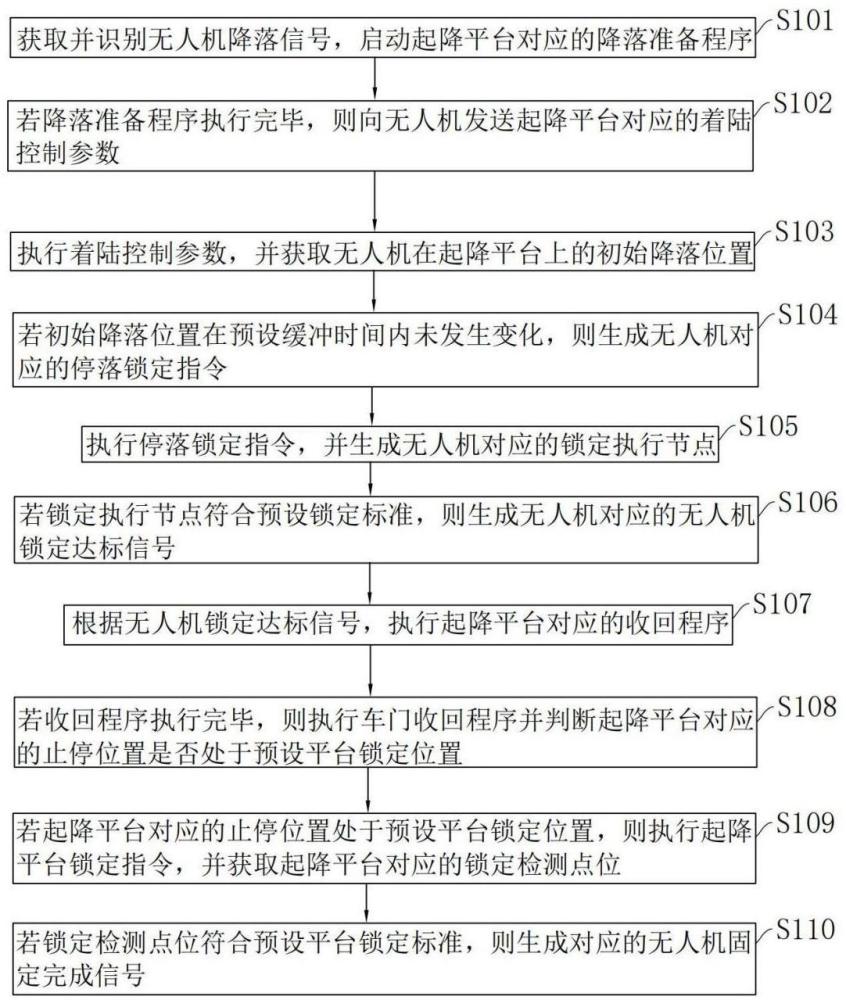
3、获取并识别所述无人机降落信号,启动起降平台对应的降落准备程序;
4、若所述降落准备程序执行完毕,则向无人机发送所述起降平台对应的着陆控制参数;
5、执行所述着陆控制参数,并获取所述无人机在所述起降平台上的初始降落位置;
6、若所述初始降落位置在预设缓冲时间内未发生变化,则生成所述无人机对应的停落锁定指令;
7、执行所述停落锁定指令,并生成所述无人机对应的锁定执行节点;
8、若所述锁定执行节点符合预设锁定标准,则生成所述无人机对应的无人机锁定达标信号;
9、根据所述无人机锁定达标信号,执行所述起降平台对应的收回程序;
10、若所述收回程序执行完毕,则执行车门收回程序并判断所述起降平台对应的止停位置是否处于预设起降平台锁定位置;
11、若所述起降平台对应的所述止停位置处于所述预设起降平台锁定位置,则执行起降平台锁定指令,并获取所述起降平台对应的锁定检测点位;
12、若所述锁定检测点位符合预设起降平台锁定标准,则生成对应的无人机固定完成信号。
13、通过采用上述技术方案,在车载无人机的起降平台执行完降落准备程序后,向无人机发送起降平台具体位置的着陆控制参数,进而提升了对无人机在起降平台上着陆位置的自动控制和锁定效果,进一步当检测到无人机的初始降落位置在预设缓冲时间内未发生变化时,生成无人机的停落锁定指令,可减少因车辆驶入颠簸路段致使无人机停落姿态频繁变动而造成锁定异常情况的发生,然后根据上述停落锁定指令执行无人机的锁定程序,该锁定程序包括了无人机各个安全部位在起落平台上的锁定执行节点,若锁定执行节点符合相应的预设锁定标准,则表明此时无人机在起降平台上已经安全锁定,随即执行起降平台对应的收回程序即将起降平台收回至车门上的指定位置,以及车门收回程序即控制车门转动收至车内,若此时起降平台对应的止停位置处于预设平台锁定位置,则说明当前起降平台已经运行至车内的锁定预备位置,进一步对起降平台的各个锁定部位进行锁定,同时生成各个锁定部位的锁定检测点位,若上述锁定检测点位符合相应预设平台锁定标准,则生成表明无人机固定完成的信号,由于在无人机的降落、定位、锁定以及平台锁定过程中设置了一系列安全监管机制,使得车载无人机起降平台能够更好地对无人机进行安全固定,从而提升了无人机在车载无人机起降平台上的稳定性和安全性。
14、第二方面,本技术提供一种车载无人机固定系统,包括:
15、信号获取模块,用于获取并识别所述无人机降落信号,启动起降平台对应的降落准备程序;
16、参数发送模块,若所述降落准备程序执行完毕,则所述着陆控制模块向无人机发送所述起降平台对应的着陆控制参数;
17、参数执行分析模块,用于执行所述着陆控制参数,并获取所述无人机在所述起降平台上的初始降落位置;
18、停落锁定控制模块,若所述初始降落位置在预设缓冲时间内未发生变化,则所述停落锁定控制模块用于生成所述无人机对应的停落锁定指令;
19、停落锁定执行模块,用于执行所述停落锁定指令,并生成所述无人机对应的锁定执行节点;
20、机锁定检测模块,若所述锁定执行节点符合预设锁定标准,则所述机锁定检测模块用于生成所述无人机对应的无人机锁定达标信号;
21、平台收回控制模块,用于根据所述无人机锁定达标信号,执行所述起降平台对应的收回程序;
22、平台位置分析模块,若所述收回程序执行完毕,则所述平台位置分析模块用于执行车门收回程序并判断所述起降平台对应的止停位置是否处于预设起降平台锁定位置;
23、平台锁定控制模块,若所述起降平台对应的所述止停位置处于所述预设平台锁定位置,则所述平台锁定控制模块用于执行起降平台锁定指令,并获取所述起降平台对应的锁定检测点位;
24、无人机固定检测模块,若所述锁定检测点位符合预设平台锁定标准,则所述无人机固定检测模块用于生成对应的无人机固定完成信号。
25、通过采用上述技术方案,在车载无人机的起降平台执行完降落准备程序后,通过参数发送模块向无人机发送起降平台具体位置的着陆控制参数,进而提升了对无人机在起降平台上着陆位置的自动控制和锁定效果,进一步当检测到无人机的初始降落位置在预设缓冲时间内未发生变化时,通过停落锁定控制模块生成无人机的停落锁定指令,可减少因车辆驶入颠簸路段致使无人机停落姿态频繁变动而造成锁定异常情况的发生,然后根据上述停落锁定指令并通过停落锁定执行模块执行无人机的锁定程序,该锁定程序包括了无人机各个安全部位在起落平台上的锁定执行节点,若锁定执行节点符合相应的预设锁定标准,则表明此时无人机在起降平台上已经安全锁定,随即通过平台收回控制模块启动执行起降平台对应的收回程序即将起降平台收回至车门上的指定位置,以及车门收回程序即控制车门转动收至车内,若此时通过平台位置分析模块判定起降平台对应的止停位置处于预设平台锁定位置,则说明当前起降平台已经运行至车内的锁定预备位置,进一步通过平台锁定控制模块对起降平台的各个锁定部位进行锁定,同时生成各个锁定部位的锁定检测点位,若上述锁定检测点位符合相应预设平台锁定标准,则通过无人机固定检测模块生成表明无人机固定完成的信号,由于在无人机的降落、定位、锁定以及平台锁定过程中设置了一系列安全监管机制,使得车载无人机起降平台能够更好地对无人机进行安全固定,从而提升了无人机在车载无人机起降平台上的稳定性和安全性。
26、综上所述,本技术包括以下至少一种有益技术效果:在车载无人机的起降平台执行完降落准备程序后,向无人机发送起降平台具体位置的着陆控制参数,进而提升了对无人机在起降平台上着陆位置的自动控制和锁定效果,进一步当检测到无人机的初始降落位置在预设缓冲时间内未发生变化时,生成无人机的停落锁定指令,可减少因车辆驶入颠簸路段致使无人机停落姿态频繁变动而造成锁定异常情况的发生,然后根据上述停落锁定指令执行无人机的锁定程序,该锁定程序包括了无人机各个安全部位的锁定执行节点,若锁定执行节点符合相应的预设锁定标准,则表明此时无人机在起降平台上已经安全锁定,随即执行起降平台对应的收回程序,即控制起降平台转动收至车内,若此时起降平台对应的止停位置处于预设平台锁定位置,则说明当前起降平台已经运行至锁定预备位置,进一步对起降平台的各个锁定部位进行锁定,同时生成各个锁定部位的锁定检测点位,若上述锁定检测点位符合相应预设平台锁定标准,则生成表明无人机固定完成的信号,由于在无人机的降落、定位、锁定以及平台锁定过程中设置了一系列安全监管机制,使得车载无人机起降平台能够更好地对无人机进行安全固定,从而提升了无人机在车载无人机起降平台上的稳定性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!