无人机自动换电方法和设备与流程
本技术涉及无人机配套设备的,尤其是涉及一种无人机自动换电方法和设备。
背景技术:
1、近年来,无人机技术发展迅速,无人机平台可搭载光电吊舱、高清图传链路、高清航测相机、倾斜摄影相机等载荷设备,广泛应用于军警侦察、油气管线巡检、电力巡检、森林消防、测绘等行业领域。
2、无人机平台在每次执行任务时需要用车辆进行载运,车辆上设置有储运仓;由于无人机搭载的设备和无人机自身在执行任务的过程中会损耗大量的电,因此无人机每次在执行完飞行任务返还于储运舱后都需要换电池或对电池进行充电。目前,通常采用工作人员手动操作的方式对为无人机的电池进行更换;工作人员在无人机每次起落后均需要前往储运舱对无人机的电池进行手动拆除并更换,比较浪费人力,且无人机更换电池的效率不高。
技术实现思路
1、为了提高无人机的换电效率,本技术提供一种无人机自动换电方法和设备。
2、第一方面,本技术提供的无人机自动换电方法,采用如下的技术方案:
3、无人机自动换电方法包括:
4、接收无人机电池更换指令;
5、获取无人机信息,所述无人机信息包括无人机尺寸信息;
6、基于所述无人机信息控制电动夹爪取出待更换电池;
7、选取相应的备用电池,控制电动夹爪将所述备用电池装入无人机电池架。
8、通过采用上述技术方案,接收无人机电池更换指令后,先基于获取到的待换电的无人机尺寸信息,确定与待换电无人机型号相适配的备用电池;再控制电动夹爪移动到无人机电池架的位置将相应的备用电池取出;对备用电池进行选取后,电动夹爪将备用电池运送到无人机电池架处,并将备用电池插入电池架;电动夹爪能够由程序控制,自动执行将待更换电池从无人机电池架取出并将备用电池装入无人机电池架的操作,提高了无人机换电的效率。
9、可选的,所述基于所述无人机信息控制电动夹爪取出待更换电池的步骤包括:
10、获取所述待更换电池的位置坐标信息和电动夹爪的位置坐标信息;
11、基于所述待更换电池的位置坐标信息和所述电动夹爪的位置坐标信息输出第一路径信息;
12、基于所述第一路径信息生成第一移动指令,并将所述第一移动指令发送给用于控制电动夹爪移动的驱动组件,以控制所述驱动组件执行第一移动指令,并控制电动夹爪将待更换电池取出。
13、通过采用上述技术方案,预存于计算机设备的预设算法能够根据待更换电池的位置坐标和电动夹爪的位置坐标,计算出电动夹爪在前往待更换电池的位置时需要的移动轨迹,形成第一路径信息,并基于第一路径信息生成第一移动指令并发送给驱动组件;驱动组件在接收到第一移动指令后能够控制电动夹爪向靠近待更换电池的方向移动,并控制电动夹爪对待更换电池进行夹持,实现对待更换电池的取出动作。
14、可选的,所述基于所述无人机信息控制电动夹爪将待更换电池取出之前,还包括:
15、获取电动夹爪的状态信息,所述电动夹爪的状态信息包括电动夹爪的姿态信息;
16、判断所述电动夹爪是否处于张开状态,若是,则发送夹持指令;
17、若否,则对电动夹爪的状态进行调节。
18、通过采用上述技术方案,在控制电动夹爪将待更换的电池从无人机电池架上取出时,预先对电动夹爪的状态进行检查,从而减小因电动夹爪的夹持状态异常导致电动夹爪对待更换电池夹取失败的可能性。
19、可选的,待更换电池的型号有多个,根据所述无人机信息确定待更换电池的型号信息;
20、所述基于所述无人机信息控制电动夹爪取出待更换电池之后,还包括:
21、获取可供所述待更换电池充电的充电组件的位置坐标信息,
22、基于所述可供所述待更换电池充电的充电器的位置坐标信息与所述电动夹爪的位置坐标信息,输出第二路径信息;
23、基于所述第二路径信息生成第二移动指令,并将所述第二移动指令发送给用于控制电动夹爪移动的驱动组件,以控制所述驱动组件执行第二移动指令,并控制电动夹爪将待充电池插入充电器充电。
24、通过采用上述技术方案,根据无人机信息能够得到待换电的无人机的尺寸和型号,能够确定待更换电池的型号;根据待更换电池的型号确定与待更换电池相适配的充电器的位置;待更换的电池从无人机上取出后随即被运送到充电器的位置自动进行充电操作,供无人机在后续换电时使用,使得电池的充电和使用发过程能够成为一个循环,工作人员无需手动对无人机换下的电池进行充电操作,提高了无人机换电的自动化程度。
25、可选的,所述选取备用电池,控制电动夹爪将所述备用电池装入无人机电池架的步骤包括:
26、选择一个电量充足的备用电池,并获取所述备用电池的位置坐标信息和无人机电池架的位置坐标信息;
27、基于所述备用电池的位置坐标信息和所述无人机电池架的位置坐标信息输出第三路径信息;
28、基于所述第三路径信息生成第三移动指令,并将所述第三移动指令发送给用于控制电动夹爪移动的驱动组件,以控制所述驱动组件执行第三移动指令,并控制电动夹爪将备用电池插入无人机电池架。
29、通过采用上述技术方案,选取好电量合适的备用电池后,预设于计算机内的程序能够自动根据备用电池的位置坐标和无人机电池架的位置坐标形成电动夹爪待移动的轨迹形成第三路径信息;基于第三路径信息生成第三移动指令并发送;驱动组件在接收到第三移动指令后能够控制电动夹爪和备用电池向靠近待更换电池的方向移动,并控制电动夹爪将备用电池装入无人机电池架,备用电池插入无人机电池架后,电动夹爪松开实现备用电池的装入动作。
30、可选的,所述将备用电池装入无人机之后还包括:整合全部备用电池的换电信息,所述备用电池的换电信息包括备用电池的位置坐标信息和备用电池的可用电量信息。
31、通过采用上述技术方案,对备用电池的充电信息和位置信息进行整合后,主控单元能够基于备用电池的换电信息筛选出电量充足且距离电动夹爪的位置最近的备用电池,从而减小电动夹爪将备用电池运送到无人机电池架所需的时长,提高无人机的换电效率。
32、第二方面,本技术提供的无人机自动换电设备,采用如下的技术方案:
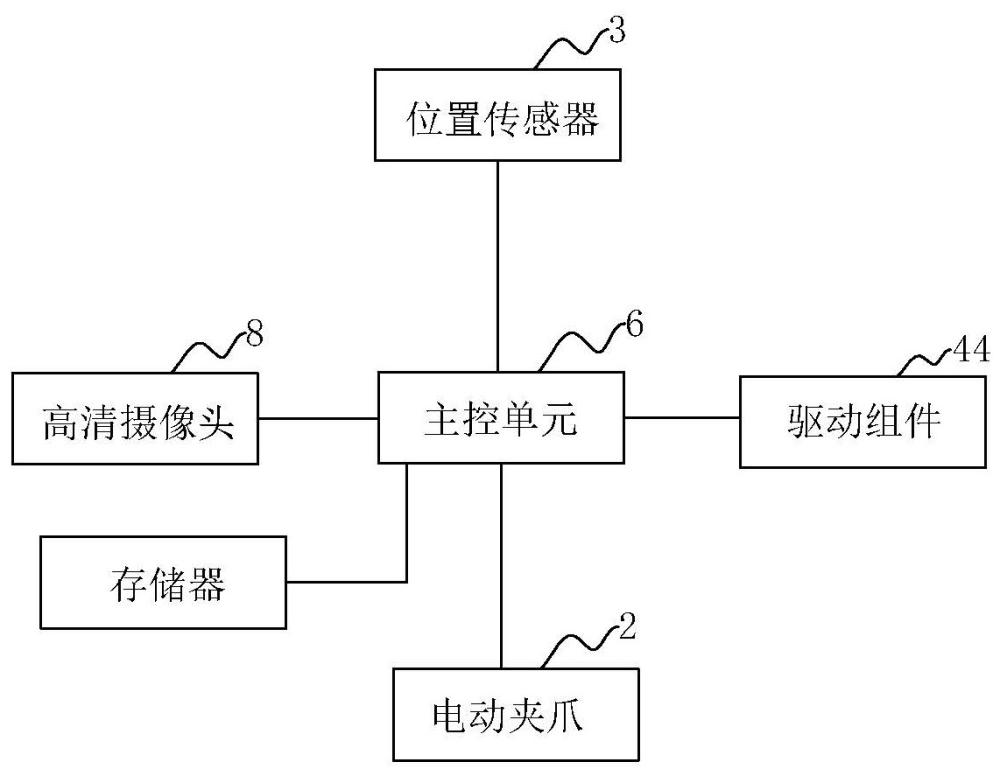
33、无人机自动换电设备,包括:
34、电动夹爪,用于取放电池;所述电动夹爪使用时具有张开状态和夹持状态;
35、若干位置传感器,若干所述位置传感器分别设置于无人机电池架、所述电动夹爪和若干电池上,若干所述位置传感器用于获取无人机电池架、所述电动夹爪与电池的位置坐标信息;
36、充电组件,用于为电池充电;
37、驱动组件,用于牵引所述电动夹爪在无人机电池架与所述充电组件之间往复移动;
38、主控单元,用于接收无人机电池更换指令;若干所述位置传感器、所述电动夹爪和所述驱动组件均与所述主控单元通讯连接。
39、通过采用上述技术方案,主控单元用于接收无人机电池更换指令,位置传感器能够将无人机电池架、电动夹爪与电池的位置坐标发送给主控单元,使得处理器能够对无人机电池架、电动夹爪与电池的位置坐标信息进行获取,从而便于工作人员对电动夹爪的行动轨迹进行规划;充电组件能够对无人机更换的电池进行充电,驱动组件能够牵引电动夹爪在无人机电池架与充电组件之间往复移动,电动夹爪能够对电池进行夹持和放开,实现对电池的取放;电动夹爪能够将待更换电池从无人机取出并转移到充电组件进行充电,再将备用电池运送到无人机电池架处,从而实现无人机的自动换电。
40、可选的,所述充电组件包括若干充电器,若干所述充电器固定设置于所述储运舱的内壁,且若干所述充电器均位于所述电动夹爪的活动路径上,所述充电器上开设有适配于电池的插槽。
41、通过采用上述技术方案,插槽可供电池扣入,使用时电动夹爪将从无人机取出的电池插入插槽内,实现充电器对电池的充电操作;充在无人机需要再次换电时,电动夹爪能够将充满电的电池从插槽内取出运送到无人机电池架处,提高无人机换电的自动化程度。
42、可选的,所述驱动组件包括安装于所述储运舱内壁的丝杆,所述丝杆能够绕自身轴线方向转动,且所述丝杆的长度方向与所述储运舱的长度方向一致;所述丝杆上螺纹连接有滑块,所述电动夹爪设置于所述滑块远离所述储运舱内壁的一侧;所述驱动组件还包括驱动电机,所述驱动电机的底座与所述储运舱的内壁固定连接,所述驱动电机的输出端与所述丝杆同轴固定,所述驱动电机的信号输入端与所述主控单元的信号输出端通讯连接。
43、通过采用上述技术方案,驱动电机在接收到第一移动指令(或第二移动指令或第三移动指令)后,能够带动丝杆绕自身轴线方向周向转动,从而带动滑块沿丝杆的长度方向往复运动,实现对电动夹爪沿储运舱长度方向位置的调节。
44、可选的,所述驱动组件还包括伸缩杆,所述伸缩杆包括依次连接的固定座和伸缩端,所述固定座与所述伸缩端同轴设置;所述伸缩端远离所述固定座的一端与所述电动夹爪连接,所述固定座远离所述伸缩端的一端与所述滑块固定连接,所述伸缩端与所述丝杆的长度方向垂直,且所述伸缩端朝向所述充电器。
45、通过采用上述技术方案,当电动夹爪移动到指定位置后,伸缩杆能够使得电动夹爪能够实现向靠近或远离充电器(或无人机电池架)的方向往复移动,实现电动夹爪对电池的取放动作。
46、综上所述,本技术包括以下至少一种有益技术效果:
47、接收无人机电池更换指令后,电动夹爪先将待更换的电池取出;再选择型号与无人机尺寸相适配的备用电池,并将备用电池装入无人机电池架内;电动夹爪能够通过程序控制自动执行将电池从无人机电池架取出并将备用电池装入无人机电池架的操作,提高了无人机换电的效率。
48、位置传感器获取无人机电池架、电动夹爪与电池的位置坐标并发送给主控单元,从而便于工作人员基于无人机电池架、电动夹爪与电池的位置对电动夹爪的行动轨迹进行规划;充电组件能够对无人机待更换的电池进行充电,驱动组件能够牵引电动夹爪在无人机电池架与充电组件之间往复移动,电动夹爪能够对电池进行夹持和放开的操作;电动夹爪能够自动将电池从无人机取出并转移到充电组件处进行充电,再将备用电池运送到无人机电池架处,从而实现无人机的自动换电。
- 还没有人留言评论。精彩留言会获得点赞!