一种小型无人机结构及伺服舵机控制系统的制作方法
本发明涉及无人机相关,尤其涉及一种小型无人机结构及伺服舵机控制系统。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等,总线伺服舵机即串行总线智能舵机,实际上可以理解为数字舵机的衍生品,数字舵机与模拟舵机相比而言是控制系统设计上的颠覆,而总线伺服舵机对于舵机而言则是在功能和运用上的颠覆,舵机的运用方式实际上只能发挥出总线伺服舵机非常小的一部分功能,实际中我们使用舵机和数字舵机时遇见的问题,每根舵机都要接到控制板上,根据舵机的身体布局位置,有的线还需要延长,端口很多,像团海草一样,其次无人机在实际中价格都很贵,很多时候我们操作无人机在降落或是在天空上发生故障的时候,无人机不会直接下落,而是稳定的缓慢下降,而现有的无人机大多数不具备支撑的减震结构,容易造成损坏,故此就需要一种小型无人机结构及伺服舵机控制系统。
2、现有常见的固定翼机电源供应均采用蓄电池走供电线路,固定翼无人机在其每个机翼上安装一个动力电机,所有供电线从机身延伸至机翼,导致线路多且复杂,机身内部构建多,不具备降落时的支撑减震结构,在天空发生故障或降落时,容易发生震动,有时下落速度过快还会导致无人机弹起后螺旋桨触碰地面,造成损坏。
3、本
技术实现要素:
4、本发明的目的在于提供一种小型无人机结构及伺服舵机控制系统,以解决上述背景技术中提出的现有常见的固定翼机电源供应均采用蓄电池走供电线路,固定翼无人机在其每个机翼上安装一个动力电机,所有供电线从机身延伸至机翼,导致线路多且复杂,机身内部构建多,不具备降落时的支撑减震结构,在天空发生故障或降落时,容易发生震动,有时下落速度过快还会导致无人机弹起后螺旋桨触碰地面,造成损坏的问题。
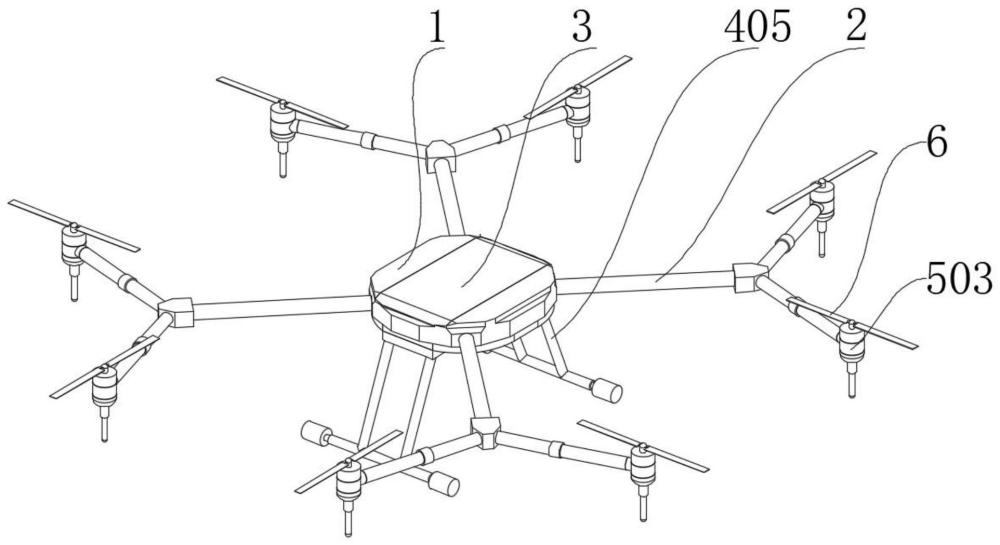
5、为实现上述目的,本发明提供一种小型无人机结构及伺服舵机控制系统:该一种小型无人机结构及伺服舵机控制系统,包括无人机外壳,所述无人机外壳的内侧表面固定连接有无人机机架,所述无人机机架的内侧表面安装有高倍率电池,所述无人机机架的一侧表面设置有减震机构,所述无人机机架的一侧表面设置有传动机构,所述传动机构的上方表面安装有螺旋桨;
6、优选的,所述减震机构包括固定架、限位槽、弹簧、固定板和支架,所述无人机机架的下方表面固定连接有固定架,所述固定架的一侧表面开设有限位槽,所述限位槽的一侧表面固定连接有弹簧,所述弹簧的一端表面固定连接有固定板,所述固定板的一侧表面固定连接有支架。
7、优选的,所述弹簧在固定板的一侧表面等间距分布,所述限位槽以固定架的中轴线对称设置。
8、优选的,所述传动机构包括螺纹杆、螺纹槽、输出控制电机、防撞杆、固定块、安装槽、轴承和安装杆,所述无人机机架的一侧表面固定连接有螺纹杆,所述螺纹杆的外侧表面螺纹连接有螺纹槽,所述螺纹杆的外侧表面螺纹连接有输出控制电机,所述输出控制电机的下方表面安装有防撞杆,所述输出控制电机上方表面固定连接有固定块,所述固定块的内侧表面开设有安装槽,所述安装槽的内侧表面固定连接有轴承,所述轴承的内侧表面固定连接有安装杆。
9、优选的,所述轴承的外壁尺寸和安装槽的内壁尺寸相吻合,所述轴承的内壁尺寸和安装杆的外壁尺寸相吻合。
10、优选的,所述伺服舵机控制系统包括无人机部分、传输部分、地面部分和通电;
11、优选的,所述无人机部分包括无人机机架、高倍率电机、无人机外壳、电调、apm飞控、电机和螺旋桨,所述传输部分包括图传、数传、相机控制模块和osd模块,所述地面部分包括接收器、pc端和一体化遥控器,所述pc端包括有照片采集、惯性控制、定位巡航和航线记忆,所述一体化遥控器包括有人为干预、实时监控和相机控制。
12、优选的,所述舵机掌握流程如下所述:
13、一、打开开关通电,先进行复位操作,无脉冲条件下输入时默认1.5脉宽;
14、二、检测电路和输出是否全都正常;
15、三、通过输出电机,电位器减速后带动电位器柄旋。
16、其中,电机经过变速或减速后连接到电位器,输出脉冲宽度为0.5-2.5ms,周期为3ms-20ms,电机转速为14000/分钟,减速比为250:1,要求电机为0.10-0.2s/60度
17、优选的,所述舵机堵转保护流程如下所述:
18、一、电机供电检测,过载电压小于0.1vdd是常规供电计时a清零;
19、二、过载电压不小于0.1vdd,计时a大于3秒钟。
20、优选的,无刷舵机流程如下所述:
21、一、通电,电平检测,切换模式,假设360度模式下,
22、定义1.5ms脉宽为d,差值e=a-d,
23、e>0反转,转速pwm占空比=e/d*100%
24、e<0正转,转速pwm占空比=e/d*100%。
25、二、电位器柄,脉宽检测,要求转向角度和电位器柄实际角度,比照要求角度与实际角度,假设180度模式下,角度全值为b,设差为c=a-b,
26、c>0||c<10,反转,转速pwm20%
27、c>10||c<180,反转,转速pwm100%。
28、三、过载检测,过载计时t>3s,pwm=20%。
29、本发明的有益效果是:该一种小型无人机结构及伺服舵机控制系统;
30、1、通过固定架、限位槽、弹簧、固定板和支架的设置,在使用过程中,首先将固定架和无人机机架进行固定,接着将弹簧安装在限位槽中,将弹簧的另一端安装在固定板上,这样当无人机降落时,无人机机架受到下降的力,向下运动挤压弹簧整体,使弹簧整体收缩,其中固定板在限位槽中,受弹力作用伸缩,从而实现对无人机机架整体的减震作用;
31、2、通过螺纹杆、螺纹槽、输出控制电机、防撞杆、固定块、安装槽、轴承和安装杆的设置,在使用过程中,首先将输出控制电机通过螺纹槽和螺纹杆螺纹拧紧,接着把防撞杆安装在输出控制电机的底部,这样在下降过程中,无人机重心不稳定时,防撞杆可以放置无人机整体大角度倾斜,导致无人机螺旋桨触碰地面,导致螺旋桨损坏,同时防止螺旋桨磕碰影响输出控制电机传动效果,然后将螺旋桨安装在安装杆中,将安装杆插入安装槽中,并和固定块中轴承进行固定安装,这样在输出控制电机传动过程中,更加省力,节省电量,在低电压情况下依然可以进行惯性续航,这样就完成了无人机的传动效果
32、3、伺服舵机控制系统在堵转保护下,首先打开开关通电,先进行复位操作,无脉冲条件下输入时默认1.5脉宽,接着检测电路和输出是否全都正常,通过输出电机,电位器减速后带动电位器柄旋,待电机经过变速或减速后连接到电位器,输出脉冲宽度为0.5-2.5ms,周期为3ms-20ms,电机转速为14000/分钟,减速比为250:1,要求电机为0.10-0.2s/60度,在使用过程中应准时扫描电位器角度而给电机转变不同的供电方式,扫描不准时容易消灭舵臂回抖现象,在脉冲不变的情况下,能锁住电机,堵转4秒后电机进入pwm少占比工作模式,堵转去除电机供电进入正常模式,人为堵转电机时,约三秒后电机进入低电流,低压供电方式,用以降低电机损耗而保护舵机,堵转去除后,电机立马进入正常供电方式,在堵转保护状态下,电机供电检测,过载电压小于0.1vdd是常规供电计时a清零,过载电压不小于0.1vdd,计时a大于3秒钟,在出现无保护功能或堵转去除后电机不能立马进入正常状态,等不良现象时放出警报,稍微外力作用舵机臂时,因电位器角度由此而变化,马达转动以校正角度差,在出现马达校正时力度过大是消灭抖动现象,如角度差与电机供电时间或pwm没有建立关系等不良现象。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!