一种地面五自由度运动模拟装置
本发明属于航天控制,具体涉及一种地面五自由度运动模拟装置,用以模拟航天器运动或者其他类型五自由度运动。
背景技术:
1、近年来随着可重复使用火箭的应用,大量小卫星得以低成本进入太空,这些小卫星或者卫星模块基本都具有智能性、敏捷性及多功能性等特点。此类小卫星搭载各种传感器、制导与导航控制装置、电子设备、电力和推进系统,这些系统都必须可靠的工作并紧密联系才能让小卫星发现、跟踪、锁定并与目标物会合。由于这些新型小卫星等航天器空间任务的复杂性,所以在进入太空前,对这些控制设备和相应的轨道及姿态控制算法进行严格的地面测试是非常必要的。一般要求地面测试环境尽可能地模仿卫星等航天器在太空飞行时自由运动的环境。在地面1g的重力环境中,模拟出太空中微重力、微力矩的动力学环境是非常困难的。
2、在地面模拟卫星运动一般采用两种方法:一种重要方法就是气浮仿真试验台,这是研制卫星等航天器过程特有的一种方法。气浮仿真试验台上的气浮轴承喷射出高压气体,形成反作用力与试验台重力抵消并产生气体润滑,使得气浮台可以近似模拟太空环境下航天器的运动。在气浮台仿真中,试验台作为航天器运动模拟器直接接入控制回路,其上可以配置航天器上的实际零部件,避免了某些零部件难以建模的困难,这些部件对控制系统的性能及影响也将直观而有效地反应在仿真实验中,这对于验证卫星控制系统方案设计的正确性、检验实际控制系统的功能和性能十分重要。另一种重要方法就是stewart平台。stewart平台也可以搭载各种卫星载荷进行六自由度运动,模拟卫星六自由度运动,尤其在模拟卫星激光通信和光学器件扫描领域。
3、以上两种方法,存在以下缺点:气浮实验台系统存在干扰力和干扰力矩,需要通过调平等手段予以消除,使得气浮台设计和使用较为复杂,另一方面,气浮台悬浮高速喷出大量气体,产生很大的噪声,导致气浮试验台难以模拟高精度位移和姿态控制,另外实验也无法在真空模拟环境中运行。stewart平台虽然可以模拟卫星平台六自由度运动,但无法搭载推力器推动卫星平台运动,在模拟卫星平台动力学方面存在局限性。
技术实现思路
1、本发明为解决现有技术存在的问题,本发明提出一种地面五自由度运动模拟装置,第一目的在于解决气浮实验台系统存在干扰力和干扰力矩、且设计和使用较为复杂、难以模拟高精度位移和姿态控制、实验也无法在真空模拟环境中运行的问题;第二目的在于解决stewart平台无法搭载推力器推动卫星平台运动的问题。
2、本发明为解决现有技术存在的问题提出以下技术部方案:
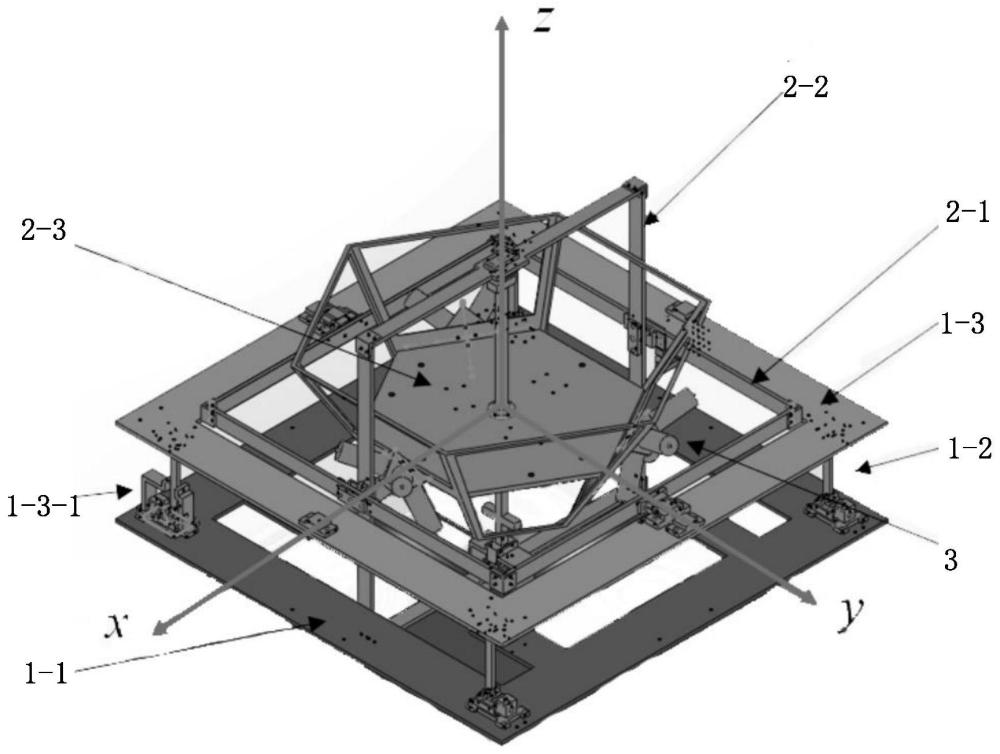
3、一种地面五自由度运动模拟装置,其特点是:该装置在真空环境中运行、能够模拟空间物体五个自由度运动,包括两自由度平动运动平台1、三轴转动平台2、以及推力器系统3;该两自由度平动运动平台1用于模拟在轨卫星两个自由度平动,该三轴转动平台2用于模拟在轨卫星三个姿态角运动,该推力器系统3用于模拟在轨卫星上搭载的推力器3推动五自由度运动平台运动。
4、进一步地,该两自由度平动运动平台包括下部固定基座1-1、二轴转动机构1-2、上部平动台1-3、配重1-4;其中,上部平动台1-3可以绕二轴转动机构1-2沿两个正交方向平动;上部平动台1-3的重力负刚度和二轴转动机构1-2正刚度通过调节配重1-4抵消,两个平动方向近似零刚度。
5、进一步地,该三轴转动平台模拟在轨卫星三个姿态角运动,包括外框2-1、中框2-2和内部卫星模拟平台2-3;外框2-1通过外框弹性枢轴2-6和上部平动台1-3连接,中框2-2通过中框弹性枢轴2-4和外框2-2连接,内部卫星模拟平台2-3通过中框和卫星模拟平台连接机构2-5和中框连接。
6、进一步地,该运动模拟装置各运动自由度准零刚度,能够搭载驱动力机构进行精确控制。
7、进一步地,该运动模拟装置能够根据实际搭载设备的尺寸、重量情况进行设计运动台的参数,达到各个运动自由度准零刚度。
8、进一步地,所述内部卫星模拟平台2-3为六边体,六边体的上表面和下表面分别为等边长的六边形,上六边形的每条边长大于对应的下六边形的每条边长,形成六边体的六个上宽下窄的梯形侧面。
9、进一步地,所述推力器系统3设有三个推力器,三个推力器对称布设在内部卫星模拟平台2-3的六个梯形面上。
10、本发明的优点效果
11、1、本发明以在地面模拟在轨卫星运动为目的,提出一种地面五自由度运动模拟方法。该方案包括一个两自由度平动台和一个三自由度转动模拟台,二者组合成为一个五自由度运动台。运动台可以搭载微推力器,微推力器推动卫星平台多自由度运动,模拟在轨卫星运动。运动台可以在真空环境下运行,进行卫星控制高精度模拟。
12、2、本发明具有以下效果:(1)无需气体悬浮,可以在真空环境中运行,可以模拟空间物体五个自由度运动,可以满足高精度跟踪控制要求;(2)运动台各运动自由度准零刚度,可以搭载驱动力机构进行精确控制;(3)可以根据实际搭载设备的尺寸、重量情况进行设计运动台的参数,达到各个运动自由度准零刚度。
技术特征:
1.一种地面五自由度运动模拟装置,其特征在于:该装置在真空环境中运行、能够模拟空间物体五个自由度运动,包括两自由度平动运动平台(1)、三轴转动平台(2)、以及推力器系统(3);该两自由度平动运动平台(1)用于模拟在轨卫星两个自由度平动,该三轴转动平台(2)用于模拟在轨卫星三个姿态角运动,该推力器系统(3)用于模拟在轨卫星上搭载的推力器(3)推动五自由度运动平台运动。
2.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:该两自由度平动运动平台包括下部固定基座(1-1)、二轴转动机构(1-2)、上部平动台(1-3)、配重(1-4);其中,上部平动台(1-3)可以绕二轴转动机构(1-2)沿两个正交方向平动;上部平动台(1-3)的重力负刚度和二轴转动机构(1-2)正刚度通过调节配重(1-4)抵消,两个平动方向近似零刚度。
3.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:该三轴转动平台模拟在轨卫星三个姿态角运动,包括外框(2-1)、中框(2-2)和内部卫星模拟平台(2-3);外框(2-1)通过外框弹性枢轴(2-6)和上部平动台(1-3)连接,中框(2-2)通过中框弹性枢轴(2-4)和外框(2-2)连接,内部卫星模拟平台(2-3)通过中框和卫星模拟平台连接机构(2-5)和中框连接。
4.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:该运动模拟装置各运动自由度准零刚度,能够搭载驱动力机构进行精确控制。
5.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:该运动模拟装置能够根据实际搭载设备的尺寸、重量情况进行设计运动台的参数,达到各个运动自由度准零刚度。
6.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:所述内部卫星模拟平台(2-3)为六边体,六边体的上表面和下表面分别为等边长的六边形,上六边形的每条边长大于对应的下六边形的每条边长,形成六边体的六个上宽下窄的梯形侧面。
7.根据权利要求1所述一种地面五自由度运动模拟装置,其特征在于:所述推力器系统(3)设有三组推力器,三组推力器对称布设在内部卫星模拟平台(2-3)的三个梯形面上。
技术总结
本发明公开了一种地面五自由度运动模拟装置,其特点是:该装置在真空环境中运行、能够模拟空间物体五个自由度运动,包括两自由度平动运动平台、三轴转动平台、以及推力器系统;该两自由度平动运动平台用于模拟在轨卫星两个自由度平动,该三轴转动平台用于模拟在轨卫星三个姿态角运动,该推力器系统用于模拟在轨卫星上搭载的推力器推动五自由度运动平台运动。本发明具有以下效果:无需气体悬浮,可以在真空环境中运行,可以模拟空间物体五个自由度运动,可以满足高精度跟踪控制要求;运动台各运动自由度准零刚度,可以搭载驱动力机构进行精确控制;可以根据实际搭载设备的尺寸、重量情况进行设计运动台的参数,达到各个运动自由度准零刚度。
技术研发人员:章楚,贺建武,段俐,康琦
受保护的技术使用者:中国科学院力学研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!