可变型机臂与上下错位桨叶的四旋翼飞行器及其控制方法
本发明属于小型飞行器、旋翼空气动力学,尤其涉及一种可变型机臂与上下错位桨叶的四旋翼飞行器及其控制方法。
背景技术:
1、无人飞行器可以进行垂直起降并悬停。由于这些特性,它被用于监视、搜索和救援以及侦察等任务。在存在化学污染和密闭环境中减少人类暴露风险。可以在下水道、洞穴和倒塌的房屋等地方执行所需的任务并在诸多领域有着极大的应用。但是传统的无人飞行器在狭窄地形常常难以发挥出应有效果,故设计出一种能够改变机臂夹角的四旋翼无人飞行器。同时,针对机臂夹角发生改变后造成的的动力学方程改变,提出了一种适应于该飞行器的飞行控制方法。
技术实现思路
1、本发明的目的在于克服现有技术中控制性能不足,提供可变型机臂与上下错位桨叶的四旋翼飞行器及其控制方法,实现了高效的控制机臂之间的夹角以适应狭窄环境,且通过特殊的桨叶设置可以保证悬臂旋转后桨叶间不会互相干扰,灵活性高。
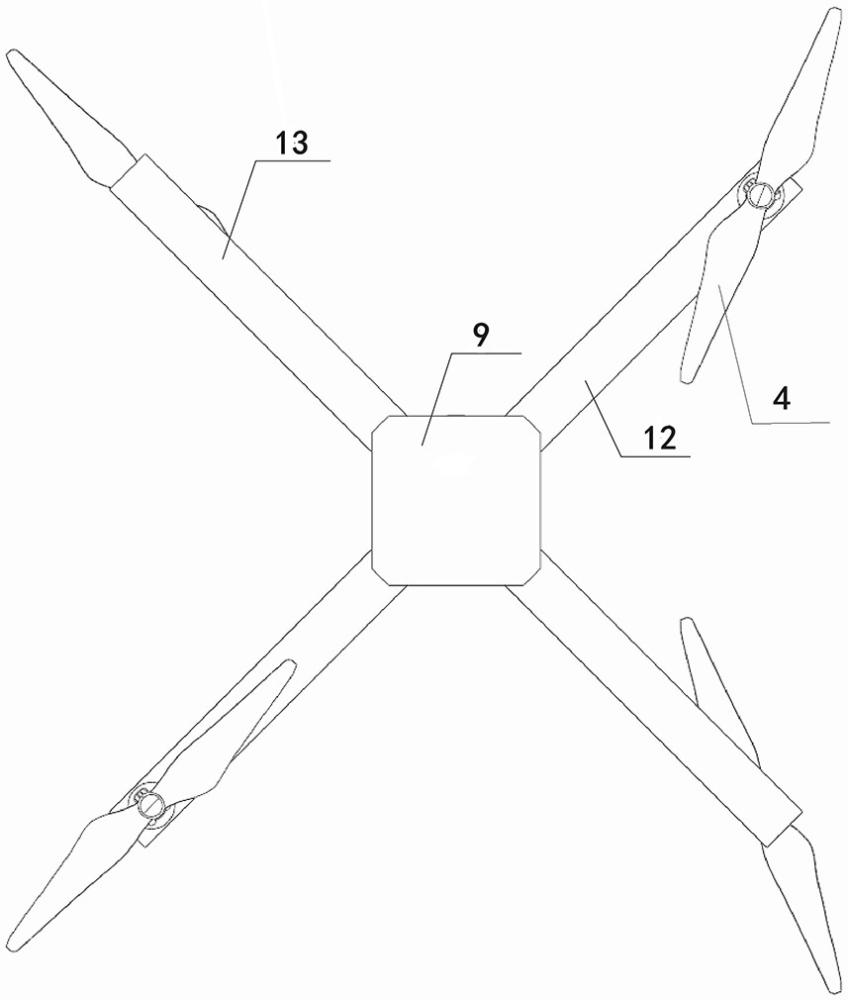
2、为实现上述目的,本发明的技术方案是:可变型机臂与上下错位桨叶的四旋翼飞行器,包括两交叉设置且交叉中心均与一线性电机转动连接的机臂,位于上侧的机臂两端上部均固设有上转动电机,位于下侧的机臂两端下部均固连有下转动电机,所述上转动电机与下转动电机驱动端均连接有旋翼;所述线性电机的初级位于上下侧的两机臂之间且其端部延伸有供线性电机的次级线性运动的导轨,线性电机的次级两侧分别延伸出反向的l型杆与两机臂铰接,两机臂随线性电机的次级在导轨上线性运动而绕铰接点相向靠拢或相背远离,位于上侧的机臂中部上方转动连接有机体,所述机体上设置有用于供电的电源。
3、进一步的,位于上方的机臂为上臂,位于下方的机臂为下臂,上臂与竖直段朝上延伸的l型杆铰接,下臂竖直段朝下延伸的l型杆铰接。
4、进一步的,所述上转动电机与下转动电机旋向相反,即四旋翼飞行器的四个旋翼中,相邻的两个旋翼旋转方向是相反的,避免旋转时产对电机产生的反作用力使电机向反方向旋转,使得飞行器自旋。
5、进一步的,所述电源由多个电池组组成。
6、可变型机臂与上下错位桨叶的四旋翼飞行器的控制方法,按以下步骤进行:
7、首先建立一个地球坐标系oexeyeze,用于研究飞行器对于地面的状态,忽略地球曲率,以无人机起飞位置作为坐标原点,oeze轴垂直于地面向下,在水平面内指定一个oexe轴,再依靠右手定则确定oeye轴;
8、无人机的三维位置可表示如下:
9、
10、并依照欧拉角定义,其中θ为俯仰角,φ为滚转角,ψ为偏航角:
11、
12、设置机体坐标系obxbybzb,其中原点ob取在机体的重心位置,obxb轴与oexe轴方向相同,其余轴同理;
13、其中u是机体沿x轴的速度,v是机体沿y轴的速度,w是机体沿z轴的速度:
14、
15、其中p为滚转角角速度,q为俯仰角角速度,r为偏航角角速度:
16、
17、单个旋翼产生的推力可由以下公式计算:
18、
19、
20、ωi表示第i个旋翼的转速,单位为rad/s;
21、其中rpm是旋翼每分钟旋转次数,pitch是旋翼桨距,单位为英寸,v0为空气速度,k为升力系数;
22、由于飞行器机臂间的夹角会发生变化,故需要规定机臂与obxb轴正方向的夹角为a;
23、创建出拉力与力矩的模型:
24、
25、其中u1为旋翼产生的总拉力,u2为旋翼在obxb方向产生的力矩,u3为旋翼在obyb方向产生的力矩,u4为旋翼在obzb方向产生的力矩;l为旋翼中心至obzb轴的距离,d为阻力系数;
26、由于飞行器的机臂夹角会发生变化,飞行器总体的转动惯量也会随之变化;由于两个机臂的连接点为中心点,将机臂视为均匀的悬臂,设每个悬臂的质量为m1,悬臂长度为l,每组上转动电机/下转动电机与旋翼的重量为m2,机体及电池组对obxb轴的转动惯量为ix1,机体及电池组等对obyb的转动惯量为iy1
27、由此可得整机的转动惯量为:
28、
29、
30、机臂夹角的变化并不会影响整机对obzb的转动惯量iz
31、设飞行器整机的质量为m;
32、结合经典的机体坐标系与地球坐标系的转换矩阵:
33、
34、可得
35、
36、
37、
38、
39、
40、
41、
42、
43、
44、
45、
46、
47、为了方便计算,提升处理器的响应速度,对四旋翼飞行器的动力学模型进行线性化:
48、
49、
50、
51、
52、
53、
54、
55、
56、
57、
58、
59、
60、因此,可以推出机体纵向状态空间模型:
61、
62、
63、以及机体横向状态空间模型:
64、
65、
66、相较于现有技术,本发明具有以下有益效果:该可变型机臂与上下错位桨叶的四旋翼飞行器可以控制机臂旋转以适应狭窄环境,特殊的桨叶设置可以保证悬臂旋转后桨叶间不会互相干扰,具有灵活性高,环境适应能力强,易于商业化的特点。
技术特征:
1.可变型机臂与上下错位桨叶的四旋翼飞行器,其特征在于:包括两交叉设置且交叉中心均与一线性电机转动连接的机臂,位于上侧的机臂两端上部均固设有上转动电机,位于下侧的机臂两端下部均固连有下转动电机,所述上转动电机与下转动电机驱动端均连接有旋翼;所述线性电机的初级位于上下侧的两机臂之间且其端部延伸有供线性电机的次级线性运动的导轨,线性电机的次级两侧分别延伸出反向的l型杆与两机臂铰接,两机臂随线性电机的次级在导轨上线性运动而绕铰接点相向靠拢或相背远离,位于上侧的机臂中部上方转动连接有机体,所述机体上设置有用于供电的电源。
2.根据权利要求1所述的可变型机臂与上下错位桨叶的四旋翼飞行器,其特征在于:位于上方的机臂为上臂,位于下方的机臂为下臂,上臂与竖直段朝上延伸的l型杆铰接,下臂竖直段朝下延伸的l型杆铰接。
3.根据权利要求1所述的可变型机臂与上下错位桨叶的四旋翼飞行器,其特征在于:所述上转动电机与下转动电机旋向相反。
4.根据权利要求1所述的可变型机臂与上下错位桨叶的四旋翼飞行器,其特征在于:所述电源由多个电池组组成。
5.可变型机臂与上下错位桨叶的四旋翼飞行器的控制方法,其特征在于,采用如权利要求1-4任一所述的可变型机臂与上下错位桨叶的四旋翼飞行器,并按以下步骤进行:
技术总结
本发明涉及可变型机臂与上下错位桨叶的四旋翼飞行器及其控制方法,包括两交叉设置且交叉中心均与一线性电机转动连接的机臂,位于上侧的机臂两端上部均固设有上转动电机,位于下侧的机臂两端下部均固连有下转动电机,所述上转动电机与下转动电机驱动端均连接有旋翼;线性电机的初级位于上下侧的两机臂之间且其端部延伸有供线性电机的次级线性运动的导轨,线性电机的次级两侧分别延伸出反向的L型杆与两机臂铰接,两机臂随线性电机的次级在导轨上线性运动而绕铰接点相向靠拢或相背远离,位于上侧的机臂中部上方转动连接有机体,机体上设置有用于供电的电源,该飞行器通过控制机臂之间的夹角以适应狭窄环境,具有灵活性高,环境适应能力强的特点。
技术研发人员:雷瑶,余航宇,栾春峰,袁硕
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!