一种基于燃油消耗速率的襟翼自动控制方法及装置与流程
本申请属于飞行控制领域,特别涉及一种基于燃油消耗速率的襟翼自动控制方法及装置。
背景技术:
1、襟翼作为飞机机翼的重要组成部分,其构型角度将直接改变机翼外形,从而带来飞机气动特性的改变,影响飞机性能,改变飞机燃油消耗速率。当飞机处于巡航阶段初期时,襟翼为巡航0°构型,此时为飞机最佳性能外形,然而随着燃油消耗,机翼重量减轻,机翼外形将会随之改变,此时襟翼0°构型将不是飞机最佳性能状态对应的角度,燃油消耗速率将增加,带来经济损失。
技术实现思路
1、为了解决上述问题,本申请提供了一种基于燃油消耗速率的襟翼自动控制方法及装置,以燃油消耗速率变化量作为驱动襟翼自动偏转的指令,控制襟翼自动偏转以保持机翼外形始终为飞机最佳性能状态。
2、本申请第一方面提供了一种基于燃油消耗速率的襟翼自动控制方法,主要包括:
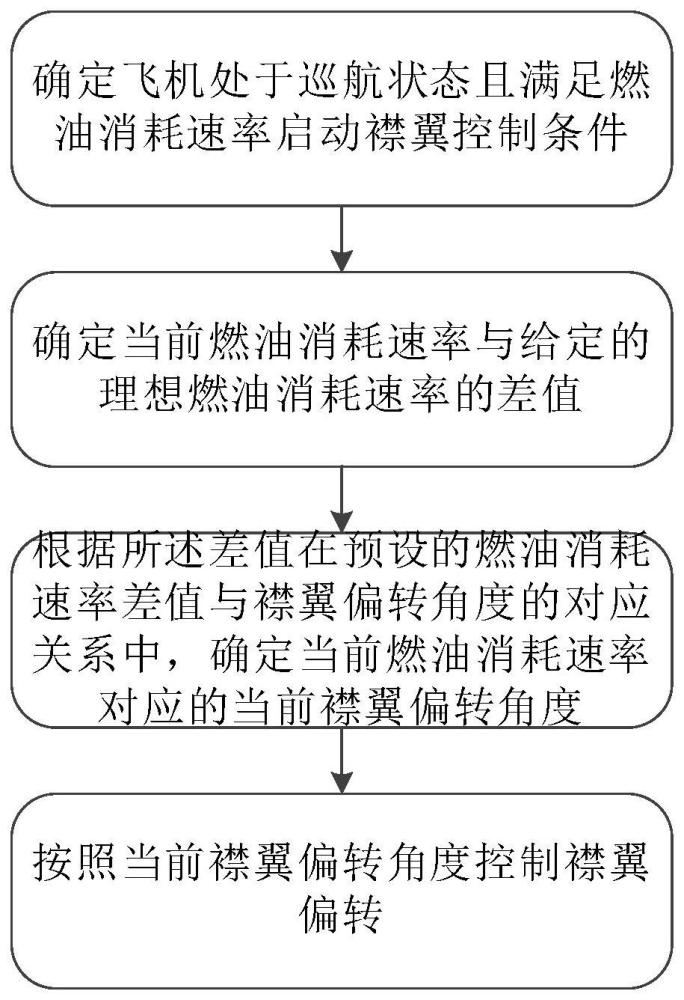
3、步骤s1、确定飞机处于巡航状态且满足燃油消耗速率启动襟翼控制条件;
4、步骤s2、确定当前燃油消耗速率与给定的理想燃油消耗速率的差值;
5、步骤s3、根据所述差值在预设的燃油消耗速率差值与襟翼偏转角度的对应关系中,确定当前燃油消耗速率对应的当前襟翼偏转角度;
6、步骤s4、按照当前襟翼偏转角度控制襟翼偏转。
7、优选的是,步骤s1进一步包括:
8、步骤s11、基于轮载信号为空的持续时间超过第一设定时间,确定飞机位于空中,基于襟翼角度为0°的持续时间超过第二设定时间,确定飞机襟翼处于巡航构型,基于燃油消耗速率超过给定的功能启动临界燃油消耗速率,确定燃油消耗速率满足启动信号;
9、步骤s12、当飞机位于空中、飞机襟翼处于巡航构型、燃油消耗速率满足启动信号以及襟翼控制系统无异常时,确定飞机处于巡航状态且满足燃油消耗速率启动襟翼控制条件。
10、优选的是,在步骤s3中,在所述对应关系中,对所述当前燃油消耗速率进行插值获得当前襟翼偏转角度。
11、优选的是,在步骤s3中,确定所述对应关系中,最靠近且小于所述当前燃油消耗速率的燃油消耗速率,以该燃油消耗速率对应的襟翼偏转角度,作为所述当前燃油消耗速率对应的当前襟翼偏转角度。
12、优选的是,步骤s3进一步包括:
13、步骤s31、确定燃油消耗速率差值与襟翼偏转角度的对应关系中,最大燃油消耗速率差值对应的最大襟翼偏转角度;
14、步骤s32、当所述当前燃油消耗速率超过最大燃油消耗速率差值时,确定当前襟翼偏转角度为所述对应关系中的最大襟翼偏转角度。
15、本申请第二方面提供了一种基于燃油消耗速率的襟翼自动控制装置,主要包括:
16、启动调节判断模块,用于确定飞机处于巡航状态且满足燃油消耗速率启动襟翼控制条件;
17、差值计算模块,用于确定当前燃油消耗速率与给定的理想燃油消耗速率的差值;
18、当前襟翼偏转角度确定模块,用于根据所述差值在预设的燃油消耗速率差值与襟翼偏转角度的对应关系中,确定当前燃油消耗速率对应的当前襟翼偏转角度;
19、襟翼控制模块,用于按照当前襟翼偏转角度控制襟翼偏转。
20、优选的是,所述启动调节判断模块包括:
21、多信号识别单元,用于基于轮载信号为空的持续时间超过第一设定时间,确定飞机位于空中,基于襟翼角度为0°的持续时间超过第二设定时间,确定飞机襟翼处于巡航构型,基于燃油消耗速率超过给定的功能启动临界燃油消耗速率,确定燃油消耗速率满足启动信号;
22、多信号运算单元,用于当飞机位于空中、飞机襟翼处于巡航构型、燃油消耗速率满足启动信号以及襟翼控制系统无异常时,确定飞机处于巡航状态且满足燃油消耗速率启动襟翼控制条件。
23、优选的是,在所述当前襟翼偏转角度确定模块中,在所述对应关系中,对所述当前燃油消耗速率进行插值获得当前襟翼偏转角度。
24、优选的是,在所述当前襟翼偏转角度确定模块中,确定所述对应关系中,最靠近且小于所述当前燃油消耗速率的燃油消耗速率,以该燃油消耗速率对应的襟翼偏转角度,作为所述当前燃油消耗速率对应的当前襟翼偏转角度。
25、优选的是,所述当前襟翼偏转角度确定模块进一步包括:
26、最大值确定单元,用于确定燃油消耗速率差值与襟翼偏转角度的对应关系中,最大燃油消耗速率差值对应的最大襟翼偏转角度;
27、超范围处理单元,用于当所述当前燃油消耗速率超过最大燃油消耗速率差值时,确定当前襟翼偏转角度为所述对应关系中的最大襟翼偏转角度。
28、本申请使得机翼形态持续保持最佳性能构型,降低了燃油消耗速率。
技术特征:
1.一种基于燃油消耗速率的襟翼自动控制方法,其特征在于,包括:
2.如权利要求1所述的基于燃油消耗速率的襟翼自动控制方法,其特征在于,步骤s1进一步包括:
3.如权利要求1所述的基于燃油消耗速率的襟翼自动控制方法,其特征在于,在步骤s3中,在所述对应关系中,对所述当前燃油消耗速率进行插值获得当前襟翼偏转角度。
4.如权利要求1所述的基于燃油消耗速率的襟翼自动控制方法,其特征在于,在步骤s3中,确定所述对应关系中,最靠近且小于所述当前燃油消耗速率的燃油消耗速率,以该燃油消耗速率对应的襟翼偏转角度,作为所述当前燃油消耗速率对应的当前襟翼偏转角度。
5.如权利要求1所述的基于燃油消耗速率的襟翼自动控制方法,其特征在于,步骤s3进一步包括:
6.一种基于燃油消耗速率的襟翼自动控制装置,其特征在于,包括:
7.如权利要求6所述的基于燃油消耗速率的襟翼自动控制装置,其特征在于,所述启动调节判断模块包括:
8.如权利要求6所述的基于燃油消耗速率的襟翼自动控制装置,其特征在于,在所述当前襟翼偏转角度确定模块中,在所述对应关系中,对所述当前燃油消耗速率进行插值获得当前襟翼偏转角度。
9.如权利要求6所述的基于燃油消耗速率的襟翼自动控制装置,其特征在于,在所述当前襟翼偏转角度确定模块中,确定所述对应关系中,最靠近且小于所述当前燃油消耗速率的燃油消耗速率,以该燃油消耗速率对应的襟翼偏转角度,作为所述当前燃油消耗速率对应的当前襟翼偏转角度。
10.如权利要求6所述的基于燃油消耗速率的襟翼自动控制装置,其特征在于,所述当前襟翼偏转角度确定模块进一步包括:
技术总结
本申请属于飞行控制领域,特别涉及一种基于燃油消耗速率的襟翼自动控制方法及装置。该方法包括:步骤S1、确定飞机处于巡航状态且满足燃油消耗速率启动襟翼控制条件;步骤S2、确定当前燃油消耗速率与给定的理想燃油消耗速率的差值;步骤S3、根据所述差值在预设的燃油消耗速率差值与襟翼偏转角度的对应关系中,确定当前燃油消耗速率对应的当前襟翼偏转角度;步骤S4、按照当前襟翼偏转角度控制襟翼偏转。本申请使得机翼形态持续保持最佳性能构型,降低了燃油消耗速率。
技术研发人员:张琪,翦巍,张飞,丁植
受保护的技术使用者:中国航空工业集团公司西安飞机设计研究所
技术研发日:
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!