一种陆空协同一体的机器人装置的制作方法
【】本技术涉及机器人,特别涉及一种陆空协同一体的机器人装置。
背景技术
0、
背景技术:
1、随着高新技术的突飞猛进,引发了军事领域的一系列重大变革;尤其引人注目的是武器装备系统不断翻新,呈现出向无人化与智能化迅速发展的趋势。
2、小型地面无人车能够搭载武器、侦察装备,因其机动、灵活、具有一定自主能力,在战场侦察、监控、电子干扰、防化探测、火力压制等方面都有着广泛的用途,因此备受青睐。空中无人机具有体积小、重量轻,航时长,便于携带,可垂直起降、悬停,具备环境感知能力与图像采集功能,可对目标进行图像识别、锁定与跟踪等优点,目前也得到了广泛的使用。
3、目前,小型地面无人车和空中无人机在执行作战任务时,采用的作战构型都为同构,即要么由多台小型地面无人车组成地面作战编队进行作战,要么就由多台空中无人机组成空中作战编队进行作战,缺少作战力量的多样性,作战适应能力差。当然,现有技术中也存在有陆空协同作战的相关方案,如申请号为cn202210314166.5公开了一种陆空协同侦查探测系统,包括:用于侦察的无人机和无人车,所述无人机包括主机体,所述主机体的四周设置有螺旋翼,所述螺旋翼的底部设置有起落架,所述主机体的上方设置有机载通信天线,所述主机体连接有机载探测单元,所述机载探测单元的底部设置有充电头,所述无人车包括主车体,所述主车体的顶部设置有无人机平台,所述无人机平台上设置有与充电头匹配的充电接口,无人机平台上设置有车辆感知单元;所述无人机平台的中部设置有车辆通信天线;该系统包括无人车及无人机两部分,二者相互配合,以在保证无人机的续航能力的同时,满足其军用侦察的隐蔽性和灵活性,便于无人侦察。然而,以上现有探测系统是通过无人车将无人机搭载至目标区域,存在速度慢,难以满足更多场景的使用需求。鉴于上述存在的问题,本案发明人对该问题进行深入研究,遂有本案产生。
技术实现思路
0、
技术实现要素:
1、本实用新型要解决的技术问题,在于提供一种陆空协同一体的机器人装置,解决现有技术因通过无人车将无人机搭载至目标区域,存在速度慢,难以满足更多场景的使用需求的问题。
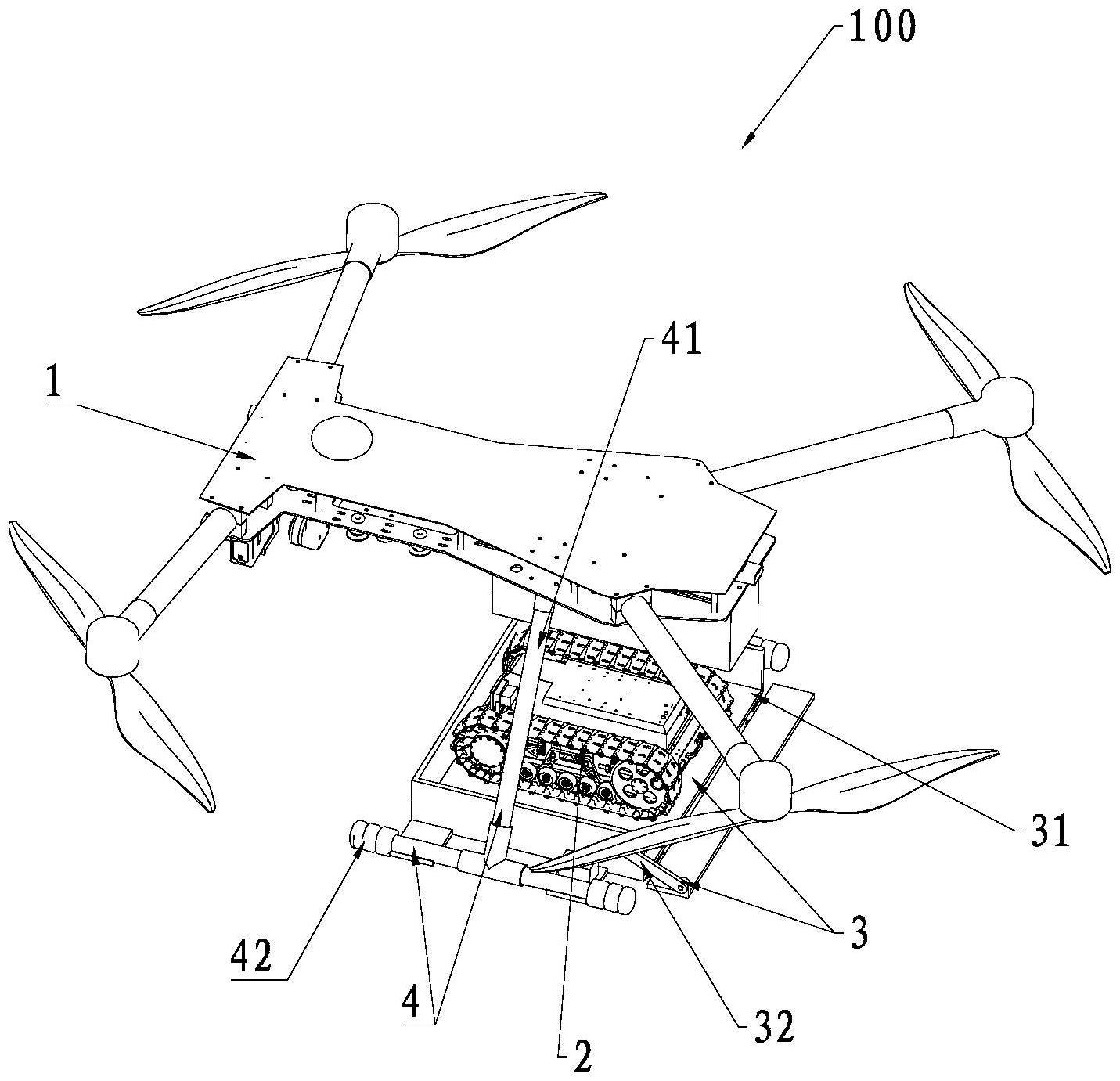
2、本实用新型是这样实现的:一种陆空协同一体的机器人装置,包括无人机本体、无人车本体以及投放机构;所述无人机本体的底部固设有支撑架;
3、所述投放机构包括无人车搭载主体和驱动组件,所述无人车搭载主体与支撑架固定连接;所述无人车搭载主体上设置有旋转投放门;所述驱动组件设置在无人车搭载主体上,所述驱动组件与旋转投放门相连接,并通过所述驱动组件驱使旋转投放门进行开闭操作。
4、进一步的,所述无人车搭载主体包括基座以及围设在所述基座的四周的挡板;所述基座的两端向外延伸设置有连接板,所述连接板与支撑架固定连接。
5、进一步的,所述基座的任意一侧的所述挡板通过铰接件与基座相铰接形成所述旋转投放门。
6、进一步的,所述驱动组件包括舵机、曲柄以及连杆;所述舵机固定在无人车搭载主体上;所述曲柄的一端与舵机的输出端固定连接,所述曲柄的另一端与连杆的一端转动连接,所述连杆的另一端与旋转投放门转动连接。
7、进一步的,所述铰接件为合页。
8、进一步的,所述基座的两端在两侧均向外延伸设置有连接板,且每个所述连接板均与支撑架固定连接。
9、进一步的,所述支撑架包括倾斜设置在无人机本体的底部两侧的支撑柱以及固定在所述支撑柱底部的支撑横梁;所述无人车搭载主体与支撑横梁固定连接。
10、进一步的,所述无人车本体为履带式无人车。
11、进一步的,所述无人机本体为多旋翼无人机。
12、通过采用本实用新型的技术方案,至少具有如下有益效果:通过采用在无人机本体上设置投放机构,并将无人车本体搭载在投放机构上,使得在具体使用时,可利用无人机本体搭载无人车本体直接飞抵作战任务区域,并将无人车本体投放至作战任务区域,且由无人机本体和无人车本体进行陆空协同共同执行作战任务,一方面能够使作战力量更加多样化,提升作战适应能力;另一方面利用无人机本体搭载无人车本体飞抵作战任务区域,能够有效提升抵达作战任务区域的速度,避免延误最佳时机;同时能够更好地适用各种复杂的环境,满足更多场景的使用需求,特别是针对荒野、森林等场合,利用无人机本体将无人车本体直接搭载至作战任务区域,能够为实际的使用带来极大的方便。
技术特征:
1.一种陆空协同一体的机器人装置,包括无人机本体和无人车本体;其特征在于:还包括投放机构;所述无人机本体的底部固设有支撑架;
2.如权利要求1所述的一种陆空协同一体的机器人装置,其特征在于:所述无人车搭载主体包括基座以及围设在所述基座的四周的挡板;所述基座的两端向外延伸设置有连接板,所述连接板与支撑架固定连接。
3.如权利要求2所述的一种陆空协同一体的机器人装置,其特征在于:所述基座的任意一侧的所述挡板通过铰接件与基座相铰接形成所述旋转投放门。
4.如权利要求1所述的一种陆空协同一体的机器人装置,其特征在于:所述驱动组件包括舵机、曲柄以及连杆;所述舵机固定在无人车搭载主体上;所述曲柄的一端与舵机的输出端固定连接,所述曲柄的另一端与连杆的一端转动连接,所述连杆的另一端与旋转投放门转动连接。
5.如权利要求3所述的一种陆空协同一体的机器人装置,其特征在于:所述铰接件为合页。
6.如权利要求2所述的一种陆空协同一体的机器人装置,其特征在于:所述基座的两端在两侧均向外延伸设置有连接板,且每个所述连接板均与支撑架固定连接。
7.如权利要求1所述的一种陆空协同一体的机器人装置,其特征在于:所述支撑架包括倾斜设置在无人机本体的底部两侧的支撑柱以及固定在所述支撑柱底部的支撑横梁;所述无人车搭载主体与支撑横梁固定连接。
8.如权利要求1-7任意一项所述的一种陆空协同一体的机器人装置,其特征在于:所述无人车本体为履带式无人车。
9.如权利要求1-7任意一项所述的一种陆空协同一体的机器人装置,其特征在于:所述无人机本体为多旋翼无人机。
技术总结
本技术提供了一种陆空协同一体的机器人装置,包括无人机本体、无人车本体以及投放机构;所述无人机本体的底部固设有支撑架;所述投放机构包括无人车搭载主体和驱动组件,所述无人车搭载主体与支撑架固定连接;所述无人车搭载主体上设置有旋转投放门;所述驱动组件设置在无人车搭载主体上,所述驱动组件与旋转投放门相连接,并通过所述驱动组件驱使旋转投放门进行开闭操作。本技术的优点在于:一方面能够使作战力量更加多样化,提升作战适应能力;另一方面利用无人机本体搭载无人车本体飞抵作战任务区域,能够有效提升抵达作战任务区域的速度,避免延误最佳时机;同时能够更好地适用各种复杂的环境,满足更多场景的使用需求。
技术研发人员:何小林,王志宏
受保护的技术使用者:泉州中国兵器装备集团特种机器人研发中心
技术研发日:20230110
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!