可切换式投放定位救灾无人机架构的制作方法
本技术涉及无人机设备,具体而言,涉及一种可切换式投放定位救灾无人机架构。
背景技术:
1、目前,无人机通常是指利用无线电遥控终端与自备程序进行操纵控制的不载人飞机。随着无人机技术的快速发展,已越来越广泛应用于各类救灾作业中。
2、当前在一些突发灾害例如地震、洪水等,通常利用无人机携带运输统一的救援箱进行投放,难以根据不同困境灵活切换不同的投放救援物资,而且在进行物资定点投放时,过早撑开降落伞还容易导致物资随风偏离既定区域范围。
技术实现思路
1、为此,本实用新型提供了一种可切换式投放定位救灾无人机架构,以解决现有技术中无人机难以根据不同困境灵活切换不同的投放物资,且在进行物资定点投放时,过早撑开降落伞易导致物资随风偏离既定区域范围的技术问题。
2、为了实现上述目的,本实用新型提供如下技术方案:
3、一种可切换式投放定位救灾无人机架构,包括:
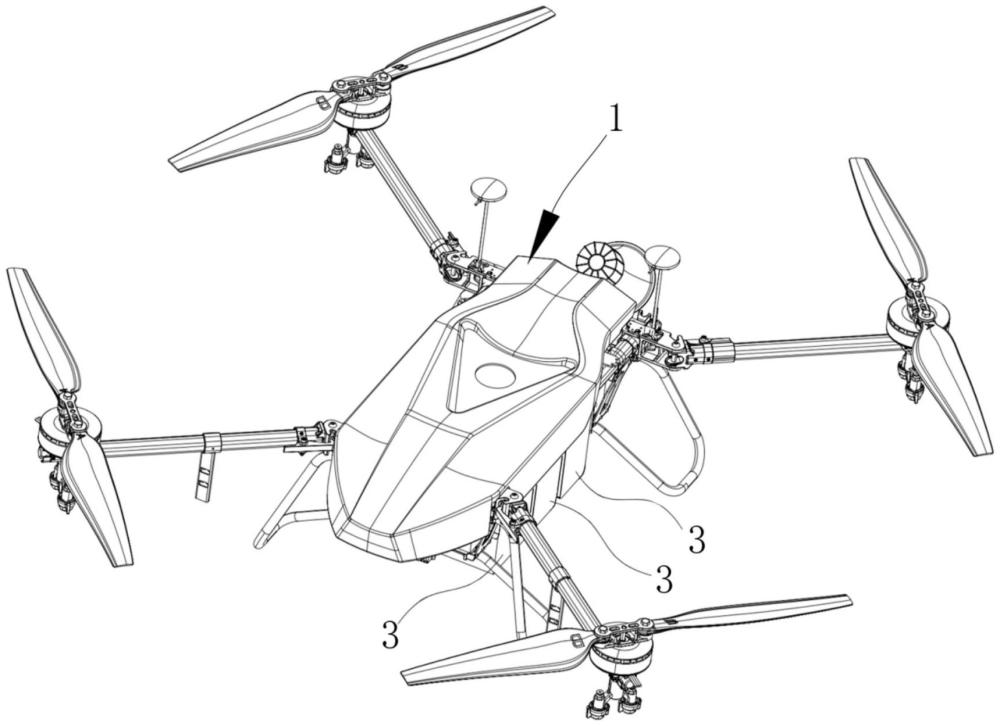
4、无人机结构;
5、无人机控制组件,固接装配于所述无人机结构;
6、投放夹具组件,设有若干组,若干组所述投放夹具组件分别固接装配于所述无人机结构,且若干组所述投放夹具组件一一对应可分离式夹持固接有若干组救援箱组件;所述无人机控制组件与若干组所述投放夹具组件之间电连接;
7、救援箱控制组件,包括分别固接设于所述救援箱组件的救援箱电控模块和气压高度传感器;所述气压高度传感器与所述救援箱电控模块的控制输入端之间通过电路相连;
8、电控降落伞,固接装配于所述救援箱组件;所述救援箱电控模块的控制输出端与所述电控降落伞的控制输入端之间通过电路相连。
9、在上述技术方案的基础上,对本实用新型做如下进一步说明:
10、作为本实用新型的进一步方案,所述无人机控制组件包括分别固接设于所述无人机结构的无人机电控模块、摄像模块以及无人机通信模块。
11、所述无人机电控模块包括通过电路相连的无人机移动电源和无人机控制模块;所述摄像模块与所述无人机控制模块的控制输入端之间通过电路相连;所述无人机控制模块与所述无人机通信模块之间通过电路相连,且所述无人机通信模块与外部人为终端之间设置为远程数据传输连接;所述无人机控制模块的控制输出端通过电路连接有无人机继电器的输入端,所述无人机继电器的输出端分别与若干组所述投放夹具组件的控制输入端之间通过电路相连。
12、作为本实用新型的进一步方案,所述投放夹具组件设置为丝杠驱动夹持组件。
13、作为本实用新型的进一步方案,每组所述投放夹具组件均包括导向滑轨座、固定块、活动块、驱动电机和丝杠杆。
14、若干组所述导向滑轨座和若干组所述固定块分别固接装配于所述无人机结构的底部,且若干组所述导向滑轨座的轨道延伸方向一一对应朝向若干组所述固定块;若干组所述活动块一一对应滑动装配于若干组所述导向滑轨座,且所述活动块与所述固定块之间相对应设置。
15、若干组所述驱动电机分别固接装配于所述无人机结构的底部,且若干组所述驱动电机的输出端分别一一对应与若干组所述丝杠杆之间传动固接相连,所述无人机控制组件的控制输出端分别与若干组所述驱动电机的控制输入端之间通过电路相连。
16、若干组所述丝杠杆的延伸方向分别一一对应与若干组所述导向滑轨座的轨道延伸方向相同。
17、若干组所述活动块分别一一对应螺合装配于若干组所述丝杠杆。
18、作为本实用新型的进一步方案,所述投放夹具组件还包括夹持卡位板。
19、所述活动块和所述固定块分别固接装配有所述夹持卡位板,所述救援箱组件的外围侧开设有卡槽,所述夹持卡位板与所述卡槽之间可分离式卡位装配。
20、作为本实用新型的进一步方案,所述救援箱控制组件固接装配于所述救援箱组件的一侧部。
21、所述电控降落伞固接装配于所述救援箱组件的顶部。
22、作为本实用新型的进一步方案,所述救援箱电控模块包括通过电路相连的救援箱移动电源和救援箱控制模块;所述救援箱控制模块的控制输出端通过电路连接有救援箱继电器,所述救援箱继电器的输出端与所述电控降落伞的控制输入端之间通过电路相连。
23、所述救援箱控制模块与所述救援箱通信模块之间通过电路相连。
24、作为本实用新型的进一步方案,所述救援箱控制组件还包括gps模块。
25、所述gps模块与所述救援箱控制模块的控制输入端之间通过电路相连。
26、本实用新型具有如下有益效果:
27、该架构能够通过无人机结构携带内存有不同种类救援物资的救援箱组件,并利用无人机控制组件有效识别不同的灾害场景或被困人员所处场景,灵活切换选择相应的投放夹具组件投放适配的救援箱组件;同时,利用救援箱控制组件灵活设置开伞气压高度,在达到特定低空位置时借助电控降落伞自动开伞,以此有助于降低救援箱组件随风偏离定点目标区域的可能性,使得投放更为精准;此外,还可通过救援箱控制组件实时追踪救援箱组件的所处位置,进而有助于对救援箱组件进行定位回收,有效提升了整体架构的功能实用性。
技术特征:
1.一种可切换式投放定位救灾无人机架构,其特征在于,包括:
2.根据权利要求1所述的可切换式投放定位救灾无人机架构,其特征在于,
3.根据权利要求1所述的可切换式投放定位救灾无人机架构,其特征在于,
4.根据权利要求3所述的可切换式投放定位救灾无人机架构,其特征在于,
5.根据权利要求4所述的可切换式投放定位救灾无人机架构,其特征在于,
6.根据权利要求1所述的可切换式投放定位救灾无人机架构,其特征在于,
7.根据权利要求1或6所述的可切换式投放定位救灾无人机架构,其特征在于,
8.根据权利要求7所述的可切换式投放定位救灾无人机架构,其特征在于,
技术总结
本技术公开了一种可切换式投放定位救灾无人机架构,包括无人机结构;无人机控制组件,固接装配于无人机结构;投放夹具组件,投放夹具组件固接装配于无人机结构,且投放夹具组件可分离式夹持固接有救援箱组件;无人机控制组件与投放夹具组件之间电连接;救援箱控制组件,包括救援箱电控模块和气压高度传感器;气压高度传感器与救援箱电控模块的控制输入端之间通过电路相连;电控降落伞,固接装配于救援箱组件;救援箱电控模块的控制输出端与电控降落伞的控制输入端之间通过电路相连。解决了现有技术中无人机难以根据不同困境灵活切换不同的投放物资,且在进行物资定点投放时,过早撑开降落伞易导致物资随风偏离既定区域范围的技术问题。
技术研发人员:朱秋阳,黎家豪,侯程远
受保护的技术使用者:深圳市翔农创新科技有限公司
技术研发日:20230504
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!