一种2N+1轴飞行器的制作方法
本发明涉及航空航天,尤其是一种2n+1轴飞行器。
背景技术:
1、飞行器可分为:航空器、航天器、火箭、导弹和制导武器地效飞行器,在大气层内飞行的飞行器称为航空器,如气球、滑翔机、飞艇、飞机、直升机等它们靠空气的静浮力或空气相对运动产生的空气动力升空飞行。
2、中国专利文献(专利名称:一种六轴垂直起降飞行器、申请号:202222947628 .5)公开的技术方案包括:机身顶部安装有横板,所述横板与机身之间安装有固定机构,所述横板两侧的量边角处均固定安装有侧向机翼架,四个所述侧向机翼架顶端的边角处均固定安装有第一电动旋翼,所述机身的尾端固定安装有尾翼,所述机身的底部固定安装有横向机翼架,所述横向机翼架顶端的两侧固定安装有第二电动旋翼;其中,第一电动旋翼的数量共四个,第二电动旋翼的数量共两个,是一款具有共六个电动旋翼的六轴垂直起降飞行器;通过飞控计算机控制第一电动旋翼和第二电动旋翼转动,控制机身的飞翔,解决了多旋翼飞行器不能长距离飞行的问题,同时解决了固定翼飞机需要在跑道上助飞的问题,可以直接向上的升力飞行。
3、但上述专利文献公开的飞行器仅仅依靠位于机身四周的六个电动旋翼提供升力,升力结构显得薄弱,会存在抗风能力弱、升力不足的现象,且容易空中翻车,失去动力时没有迫降功能,安全性不高。
技术实现思路
1、本发明克服了现有技术中的缺点,提供一种2n+1轴飞行器,具有抗风能力强、升力充足的优点,能克服背景技术中提到的问题。
2、为了解决上述技术问题,本发明是通过以下技术方案实现的:
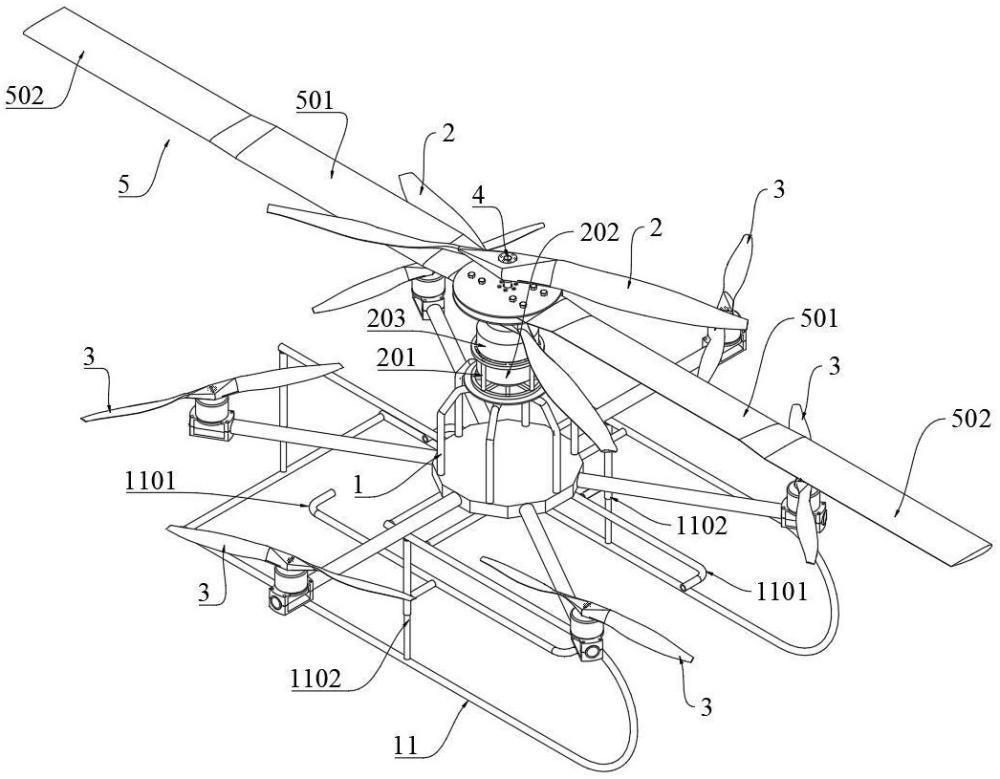
3、一种2n+1轴飞行器,n≥2,n∈整数,包括机身、偶数个中旋翼以及2n个小旋翼;
4、所述机身上设置有主轴,偶数个所述中旋翼共轴设置在所述主轴上;
5、2n个所述小旋翼连接在所述机身上、并规律分布在所述主轴的周围。小旋翼的分布可以是前后对称且左右对称分布,包括环形均匀分布、矩阵排列。
6、更进一步地,所述主轴上设置有自转旋翼组件;所述自转旋翼组件包含以下结构的一种:
7、结构a;第一自转旋翼;
8、所述第一自转旋翼转动连接在所述主轴上;
9、所述第一自转旋翼包括近心段以及远心段;近心段指靠拢主轴的一段,远心段指远离主轴的一段;近心段的展长与中旋翼的半径相当;
10、所述近心段的安装角度范围是5°至16°,所述远心段的安装角度范围是0°至3°;
11、结构b:第二自转旋翼以及第一风力叶片;第一风力叶片的直径与中旋翼的直径相当;
12、所述第二自转旋翼与所述第一风力叶片转动连接在所述主轴上;
13、所述第二自转旋翼与所述第一风力叶片固定连接且相互交叉布局;
14、所述第二自转旋翼的安装角度范围是0°至3°,所述第一风力叶片的安装角度范围是5°至16°;
15、结构c:第三自转旋翼以及第二风力叶片;第二风力叶片的直径与中旋翼的直径相当;
16、包括套筒,所述套筒转动连接所述主轴上,所述第二风力叶片连接在所述套筒上;
17、所述第三自转旋翼单向转动连接在所述套筒上;
18、所述第三自转旋翼与所述第二风力叶片位于不同高度的平面上;
19、所述第三自转旋翼的安装角度范围是0°至3°,所述第二风力叶片的安装角度范围是5°至16°。
20、更进一步地,所述机身上设置有前进动力组件,能使飞行器的前行速度更快。
21、更进一步地,所述中旋翼采用电动机直接驱动或内燃机减速后驱动。采用电动机直接驱动时结构非常简单;内燃机减速后驱动时,也不需要像传统的直升机那样采用复杂的倾转和挥舞机构。这样故障率低,安全可靠。
22、更进一步地,2n个所述小旋翼是电动机驱动的。
23、更进一步地,所述机身上设置有垂直尾翼,用于航向控制,尤其是迫降时会起关键作用。
24、更进一步地,所述机身上设置有起落架。
25、更进一步地,所述起落架包括夹持组件。
26、更进一步地,所述第一自转旋翼、第二自转旋翼以及第三自转旋翼的直径尺寸大于所述中旋翼的直径尺寸。这样设置能使迫降时下降速度更慢。
27、更进一步地,所述起落架设置有缓冲装置。
28、更进一步地,所述机身下方设置有方便陆行的汽车组件。汽车组件优先采用自动驾驶。
29、更进一步地,中旋翼组和小旋翼组分别使用一套飞控系统,更能确保安全。所述的中旋翼组是指本飞行器中的所有中旋翼的组合;所述的小旋翼组是指本飞行器中的所有小旋翼的组合。小旋翼组使用传统的多旋翼无人机的飞控;中旋翼组根据动力源的不同使用传统的共轴直升机的飞控中的一个或两个通道即可。
30、更进一步地,中旋翼组产生的最大总升力大于所述飞行器的起飞重量。
31、更进一步地,小旋翼组产生的最大总升力不小于所述飞行器的起飞重量。
32、更进一步地,中旋翼组为两个中旋翼且中旋翼的驱动装置为电机时,采用两个中空的外转子电机背靠背上下安装,两个电机的定子固连在一起,并通过一个电机支架安装在机身上,下方电机的外转子连接一根轴从两个电机的中心孔中穿过至上方电机的上方再安装上面的中旋翼,下面的中旋翼直接安装在上方电机的外转子上。
33、与现有技术相比,本发明的有益效果至少包括:
34、本飞行器包括机身、偶数个中旋翼以及2n个小旋翼,中旋翼以及小旋翼的转动均提供升力,其中中旋翼主要提供升力,小旋翼主要用作飞行姿态的控制,此作用与传统的无人机的飞行姿态的控制方式相同;并且偶数个中旋翼是共轴设置在主轴上的,因此中旋翼的长度尺寸可以适当加长,令中旋翼转动时产生的升力更强劲,由于中旋翼的直径较大,转速较快,其陀螺效应明显,所以稳定性也更好,抗风能力好。
35、由于单个小旋翼的升力远小于本飞行器的重量,且由于中旋翼的高转动惯量的存在,所以个别小旋翼故障不会使飞行器发生空中翻车,多个小旋翼故障也不易使飞行器发生翻车。
36、主轴上设置有自转旋翼组件,中旋翼以及小旋翼尤其是中旋翼转动时形成的气流会令自转旋翼组件发生转动,因此当中旋翼或/和小旋翼发生故障要迫降时,自转旋翼组件由于惯性继续旋转,下降过程在下方来流的作用下自转旋翼会快速旋转产生升力,使飞行器能缓慢下降,避免发生坠机现象,安全性高。由于设置了风力叶片,在正常飞行中自转旋翼始终处于预旋状态,有利于飞行器的稳定。
技术特征:
1.一种2n+1轴飞行器,其特征在于,包括机身(1)、偶数个中旋翼(2)以及2n个小旋翼(3);
2.根据权利要求1所述的一种2n+1轴飞行器,其特征在于,所述主轴(4)上设置有自转旋翼组件;所述自转旋翼组件包含以下结构的一种:
3.根据权利要求1或2所述的一种2n+1轴飞行器,其特征在于,所述机身(1)上设置有前进动力组件。
4.根据权利要求1或2所述的一种2n+1轴飞行器,其特征在于,所述中旋翼(2)采用电动机直接驱动或内燃机减速后驱动。
5.根据权利要求1或2所述的一种2n+1轴飞行器,其特征在于,2n个所述小旋翼(3)采用电动机驱动。
6.根据权利要求3所述的一种2n+1轴飞行器,其特征在于,所述机身(1)上设置有垂直尾翼。
7.根据权利要求1所述的一种2n+1轴飞行器,其特征在于,所述机身(1)上设置有起落架(11)。
8.根据权利要求7所述的一种2n+1轴飞行器,其特征在于,所述起落架(11)包括夹持组件(1101)。
9.根据权利要求2所述的一种2n+1轴飞行器,其特征在于,所述第一自转旋翼(5)、第二自转旋翼(6)以及第三自转旋翼(8)的直径尺寸大于所述中旋翼(2)的直径尺寸。
10.根据权利要求7所述的一种2n+1轴飞行器,其特征在于,所述起落架(11)设置有缓冲装置(1102)。
11.根据权利要求1或2所述的一种2n+1轴飞行器,其特征在于,所述机身(1)下方设置有汽车组件。
12.根据权利要求1或2所述的一种2n+1轴飞行器,其特征在于,中旋翼组和小旋翼组分别使用一套飞控系统。
13.根据权利要求4或12所述的一种2n+1轴飞行器,其特征在于,中旋翼(2)的数量为两个且中旋翼(2)的驱动装置为电机时,采用两个中空的外转子电机背靠背上下安装,两个电机的定子固连在一起,并通过电机支架(201)安装在机身(1)上,下方电机(202)的外转子连接一根轴从两个电机的中心孔中穿过至上方电机(203)的上方再安装上面的中旋翼(2),下面的中旋翼(2)直接安装在上方电机(203)的外转子上。
技术总结
本发明提供一种2N+1轴飞行器,涉及航天技术领域,包括机身、偶数个中旋翼以及2N个小旋翼;所述机身上设置有主轴,偶数个所述中旋翼共轴设置在所述主轴上;2N个所述小旋翼连接在所述机身上、并规律分布在所述主轴的周围。本发明的有益之处是,本飞行器包括机身、偶数个中旋翼以及2N个小旋翼,中旋翼以及小旋翼的转动均提供升力,并且偶数个中旋翼是共轴设置在主轴上的,因此中旋翼的长度尺寸可以适当加长,令中旋翼转动时产生的升力更强劲,稳定性也更好,抗风能力好;主轴上设置有自转旋翼组件,当中旋翼或小旋翼发生故障时要迫降时,自转旋翼组件在下方来流的作用下快速转动产生升力,使飞行器能缓慢下降,避免发生坠机现象,安全性高。
技术研发人员:王志成
受保护的技术使用者:佛山市神风航空科技有限公司
技术研发日:20230401
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!