一种实景采集结构及无人机的制作方法
本申请涉及无人机,具体涉及一种实景采集结构及无人机。
背景技术:
1、无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操控的不载人飞机,无人机根据用途可分为多种,如农业无人机、侦查无人机、实景采集无人机等,其中实景采集无人机顾名思义,便是搭载实景采集结构的无人机,通常用于对配电网进行实景采集,实景采集结构最重要的部分是实景采集摄像头,在现有技术中,实景采集摄像头与无人机之间通过多个螺栓进行固定,装卸较为麻烦,降低了工作效率,因此提出一种实景采集结构及无人机。
技术实现思路
1、本申请的目的在于:为解决背景技术提出的问题,本申请提供了一种实景采集结构及无人机。
2、本申请为了实现上述目的具体采用以下技术方案:
3、一种实景采集结构,包括:
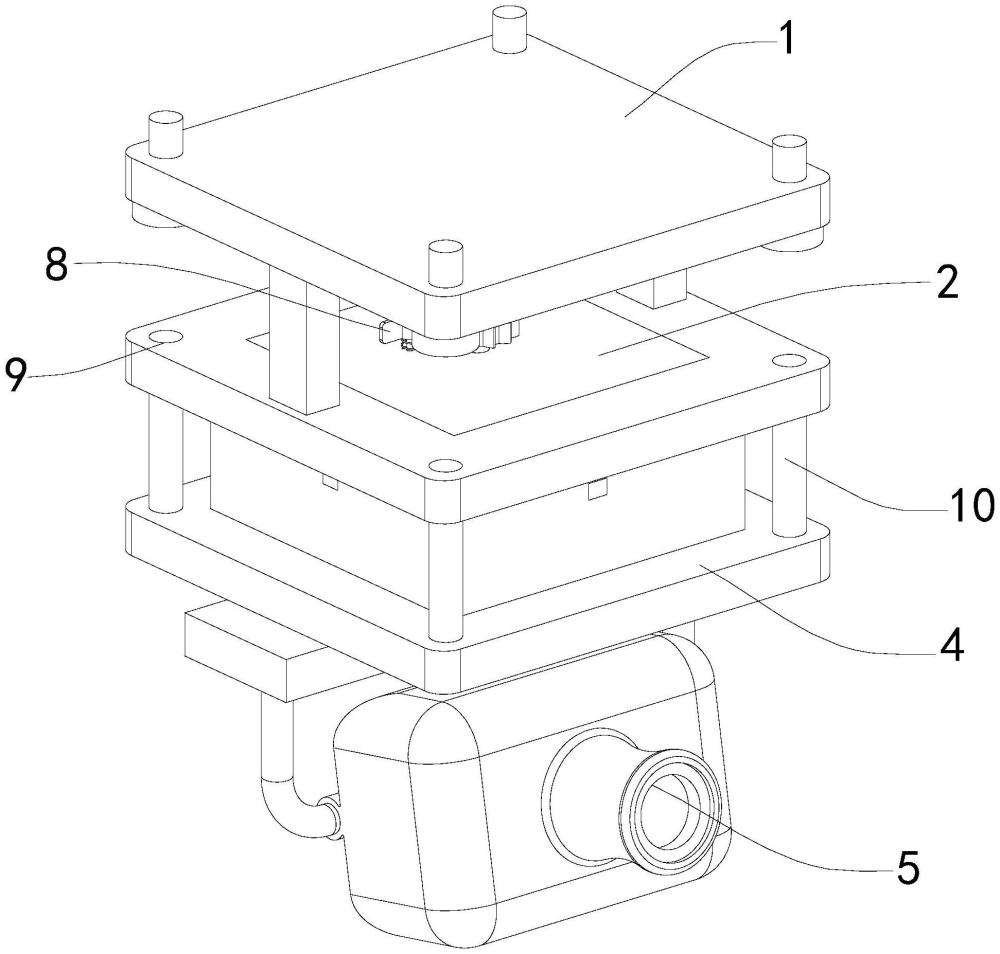
4、固定架,设置在无人机上,所述固定架上设置有固定筒,所述固定筒上滑动设置有多个环形阵列分布的定位杆;
5、连接架,其上设置有实景采集摄像头与套筒,所述套筒与固定筒插接配合,所述套筒的自由端与固定架抵触搭接,所述套筒上开设有与定位杆数量相同且一一对应的定位孔,所述定位杆与定位孔插接配合;
6、驱动机构,设置在所述套筒上且用于驱使多个定位杆同步滑动。
7、进一步地,所述固定架上开设有多个环形阵列分布的插孔,所述连接架上设置有与插孔数量相同且一一对应插接配合的插杆。
8、进一步地,所述驱动机构包括转动设置在固定筒上的转杆,所述转杆上设置有转盘,所述转盘上偏心铰接有与定位杆数量相同且一一对应的连杆,所述连杆的自由端与定位杆铰接,所述转杆与固定筒上设置有驱动件,通过所述驱动件将转杆进行锁定或解除锁定。
9、进一步地,所述驱动件包括设置在转杆上的棘轮,所述固定筒上转动设置有轴杆,所述轴杆上设置有与棘轮抵触搭接的棘爪,所述棘爪与固定筒之间设置有套设在轴杆上的扭转弹簧。
10、进一步地,所述转杆上设置有固定齿轮,所述固定筒上设置有承载架,所述承载架上设置有驱动部与锁定部,通过所述驱动部驱使固定齿轮转动,通过所述锁定部将驱动部进行锁定或解除锁定。
11、进一步地,所述驱动部包括滑动设置在承载架上的滑杆,所述滑杆的两端分别设置有限位块与固定杆,所述固定杆上设置有与固定齿轮啮合的固定齿条,所述固定杆与承载架之间设置有套设在滑杆上的挤压弹簧。
12、进一步地,所述锁定部包括滑动设置在承载架上的柱杆,所述柱杆的两端分别设置有限位板与楔形块,所述楔形块与承载架之间设置有套设在柱杆上的复位弹簧,所述固定杆上设置有与楔形块抵触搭接的固定块。
13、本申请目的之二提出无人机,包括上述的实景采集结构,所述无人机包括主体,所述固定架与主体之间通过多个螺栓连接固定。
14、本申请的有益效果如下:
15、本申请摒弃了现有技术中通过多个螺栓进行固定的方式,在使用时,通过套筒与固定筒插接配合,通过驱动机构驱使多个定位杆同步滑动,多个定位杆的自由端分别插接到多个定位孔中,套筒无法远离固定筒,即可完成实景采集摄像头的安装,反之,通过驱动机构驱使多个定位杆同步滑动,多个定位杆的自由端分别退出多个定位孔且均收回固定筒内,套筒即可脱离固定筒,即可实现实景采集摄像头的拆卸,装卸方便,提高了工作效率,因此更具有实用性。
技术特征:
1.一种实景采集结构,其特征在于,包括:
2.根据权利要求1所述的实景采集结构,其特征在于,所述固定架(1)上开设有多个环形阵列分布的插孔(9),所述连接架(4)上设置有与插孔(9)数量相同且一一对应插接配合的插杆(10)。
3.根据权利要求1所述的实景采集结构,其特征在于,所述驱动机构(8)包括转动设置在固定筒(2)上的转杆(801),所述转杆(801)上设置有转盘(802),所述转盘(802)上偏心铰接有与定位杆(3)数量相同且一一对应的连杆(803),所述连杆(803)的自由端与定位杆(3)铰接,所述转杆(801)与固定筒(2)上设置有驱动件(804),通过所述驱动件(804)将转杆(801)进行锁定或解除锁定。
4.根据权利要求3所述的实景采集结构,其特征在于,所述驱动件(804)包括设置在转杆(801)上的棘轮(80401),所述固定筒(2)上转动设置有轴杆(80402),所述轴杆(80402)上设置有与棘轮(80401)抵触搭接的棘爪(80403),所述棘爪(80403)与固定筒(2)之间设置有套设在轴杆(80402)上的扭转弹簧(80404)。
5.根据权利要求3所述的实景采集结构,其特征在于,所述转杆(801)上设置有固定齿轮(11),所述固定筒(2)上设置有承载架(12),所述承载架(12)上设置有驱动部(13)与锁定部(14),通过所述驱动部(13)驱使固定齿轮(11)转动,通过所述锁定部(14)将驱动部(13)进行锁定或解除锁定。
6.根据权利要求5所述的实景采集结构,其特征在于,所述驱动部(13)包括滑动设置在承载架(12)上的滑杆(1301),所述滑杆(1301)的两端分别设置有限位块(1302)与固定杆(1303),所述固定杆(1303)上设置有与固定齿轮(11)啮合的固定齿条(1304),所述固定杆(1303)与承载架(12)之间设置有套设在滑杆(1301)上的挤压弹簧(1305)。
7.根据权利要求6所述的实景采集结构,其特征在于,所述锁定部(14)包括滑动设置在承载架(12)上的柱杆(1401),所述柱杆(1401)的两端分别设置有限位板(1402)与楔形块(1403),所述楔形块(1403)与承载架(12)之间设置有套设在柱杆(1401)上的复位弹簧(1404),所述固定杆(1303)上设置有与楔形块(1403)抵触搭接的固定块(1405)。
8.无人机,包括如权利要求1-7任意一项所述的实景采集结构,其特征在于,所述无人机包括主体(15),所述固定架(1)与主体(15)之间通过多个螺栓连接固定。
技术总结
本申请公开了一种实景采集结构及无人机,涉及无人机技术领域。本申请包括:固定架,设置在无人机上,所述固定架上设置有固定筒,所述固定筒上滑动设置有多个环形阵列分布的定位杆;连接架,其上设置有实景采集摄像头与套筒,所述套筒与固定筒插接配合,所述套筒的自由端与固定架抵触搭接,所述套筒上开设有与定位杆数量相同且一一对应的定位孔。本申请摒弃了现有技术中通过多个螺栓进行固定的方式,在使用时,通过套筒与固定筒插接配合,通过驱动机构驱使多个定位杆同步滑动,多个定位杆的自由端分别插接到多个定位孔中,套筒无法远离固定筒,即可完成实景采集摄像头的安装,反之,通过驱动机构驱使多个定位杆同步滑动。
技术研发人员:顾超,袁林华,段泽伟
受保护的技术使用者:南京智循电力科技有限公司
技术研发日:20230824
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!