一种具备起落减震架结构的无人飞行器的制作方法
本技术涉及无人飞行器,具体为一种具备起落减震架结构的无人飞行器。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等;
2、公开号为cn212605793u的中国专利公开了一种起落架可快速拆卸的无人机飞行器,通过设置有减震结构,当飞行器本体降落时,为了能够很好的保护飞行器本体,可以在飞行器本体上安装减震块,在降落时,减震块上的独立减震杆根据第一弹簧弹力的作用可以对飞行器本体起到独立减震的效果,从而达到保护飞行器本体的效果。
3、上述专利中,实际运用中无人飞行器会搭载摄像模组进行飞行作业,该类飞行器在进行垂直降落时受机身惯性产生冲击力,从而导致机身以及摄像结构受震动的影响;因此,不满足现有的需求,对此提出了一种具备起落减震架结构的无人飞行器。
技术实现思路
1、本实用新型的目的在于提供一种具备起落减震架结构的无人飞行器,飞行器降落时平衡脚撑与地面接触的瞬间平衡脚撑会向内弯折,使整个框架机体下沉从而降低降落冲击对机体的影响,之后借助平衡脚撑内侧的伸缩摇臂来使其复位,可以解决现有技术中的问题。
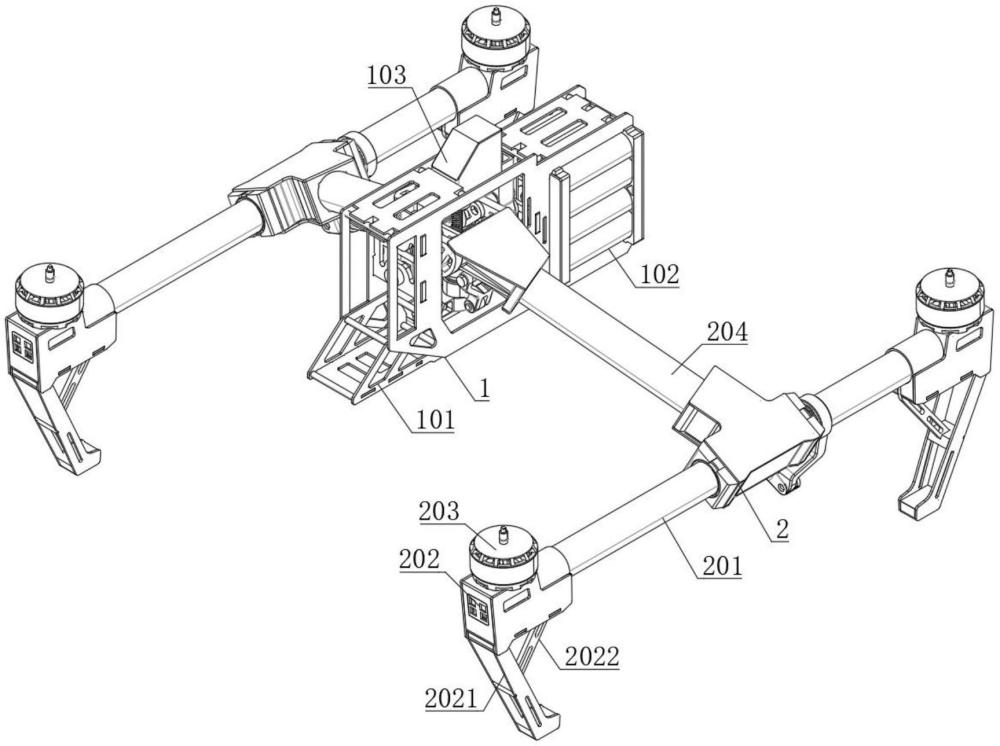
2、为实现上述目的,本实用新型提供如下技术方案:一种具备起落减震架结构的无人飞行器,包括框架机体,还包括飞行支架,其设置于框架机体的两侧,所述框架机体一端的底部设置有前轴挂架,前轴挂架与框架机体通过螺钉连接,所述框架机体的另一端设置有电池舱,电池舱与框架机体通过卡槽连接,所述框架机体的顶部设置有传感器模块,传感器模块与电池舱电性连接,所述飞行支架包括横杆和撑杆,撑杆与横杆通过轴套连接,所述横杆的两端均设置有机轴,机轴与横杆通过螺钉连接,所述机轴的顶部设置有旋翼电机,旋翼电机与机轴通过螺钉连接。
3、优选的,所述机轴的底部设置有平衡脚撑,平衡脚撑与机轴通过弹簧轴转动连接,所述平衡脚撑的一侧设置有伸缩摇臂,所述伸缩摇臂的一端与机轴转动连接,伸缩摇臂的另一端与平衡脚撑滑动连接。
4、优选的,所述传感器模块下方设置有内轴架,内轴架与框架机体通过螺栓连接,所述内轴架的内侧设置有调节丝杆,调节丝杆与内轴架通过卡槽连接。
5、优选的,所述撑杆的一侧设置有辅杆,辅杆的一端设置有阻尼套环,所述阻尼套环与横杆通过卡槽连接,辅杆的另一端与框架机体转动连接。
6、优选的,所述撑杆的一端设置有卡撑,卡撑与撑杆通过螺栓连接,所述卡撑的下方设置有丝杆螺套,卡撑通过丝杆螺套与调节丝杆连接。
7、优选的,所述卡撑的外侧设置有一体成型的铰架,卡撑通过铰架与框架机体转动连接。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型,在每个旋翼电机的下方都安装有一组平衡脚撑,平衡脚撑与横杆之间通过弹簧轴转动相连,当飞行器降落时平衡脚撑与地面接触的瞬间平衡脚撑会向内弯折,使整个框架机体下沉从而降低降落冲击对机体的影响,之后借助平衡脚撑内侧的伸缩摇臂来使其复位;
10、2、本实用新型,撑杆的一端用于连接横杆,而另一端则与框架机体相连,二者之间通过丝杆螺套和调节丝杆连接,通过转动丝杆螺套可以调节整个飞行支架与框架机体之间的扩展角度。
技术特征:
1.一种具备起落减震架结构的无人飞行器,包括框架机体(1),其特征在于;还包括飞行支架(2),其设置于框架机体(1)的两侧,所述框架机体(1)一端的底部设置有前轴挂架(101),前轴挂架(101)与框架机体(1)通过螺钉连接,所述框架机体(1)的另一端设置有电池舱(102),电池舱(102)与框架机体(1)通过卡槽连接,所述框架机体(1)的顶部设置有传感器模块(103),传感器模块(103)与电池舱(102)电性连接,所述飞行支架(2)包括横杆(201)和撑杆(204),撑杆(204)与横杆(201)通过轴套连接,所述横杆(201)的两端均设置有机轴(202),机轴(202)与横杆(201)通过螺钉连接,所述机轴(202)的顶部设置有旋翼电机(203),旋翼电机(203)与机轴(202)通过螺钉连接。
2.根据权利要求1所述的一种具备起落减震架结构的无人飞行器,其特征在于:所述机轴(202)的底部设置有平衡脚撑(2021),平衡脚撑(2021)与机轴(202)通过弹簧轴转动连接,所述平衡脚撑(2021)的一侧设置有伸缩摇臂(2022),所述伸缩摇臂(2022)的一端与机轴(202)转动连接,伸缩摇臂(2022)的另一端与平衡脚撑(2021)滑动连接。
3.根据权利要求2所述的一种具备起落减震架结构的无人飞行器,其特征在于:所述传感器模块(103)下方设置有内轴架(1031),内轴架(1031)与框架机体(1)通过螺栓连接,所述内轴架(1031)的内侧设置有调节丝杆(1032),调节丝杆(1032)与内轴架(1031)通过卡槽连接。
4.根据权利要求3所述的一种具备起落减震架结构的无人飞行器,其特征在于:所述撑杆(204)的一侧设置有辅杆(205),辅杆(205)的一端设置有阻尼套环(2051),所述阻尼套环(2051)与横杆(201)通过卡槽连接,辅杆(205)的另一端与框架机体(1)转动连接。
5.根据权利要求4所述的一种具备起落减震架结构的无人飞行器,其特征在于:所述撑杆(204)的一端设置有卡撑(2041),卡撑(2041)与撑杆(204)通过螺栓连接,所述卡撑(2041)的下方设置有丝杆螺套(2042),卡撑(2041)通过丝杆螺套(2042)与调节丝杆(1032)连接。
6.根据权利要求5所述的一种具备起落减震架结构的无人飞行器,其特征在于:所述卡撑(2041)的外侧设置有一体成型的铰架(2043),卡撑(2041)通过铰架(2043)与框架机体(1)转动连接。
技术总结
本技术公开了一种具备起落减震架结构的无人飞行器,属于无人飞行器技术领域。一种具备起落减震架结构的无人飞行器,包括框架机体,还包括飞行支架,其设置于框架机体的两侧,所述框架机体一端的底部设置有前轴挂架,前轴挂架与框架机体通过螺钉连接,所述框架机体的另一端设置有电池舱,电池舱与框架机体通过卡槽连接,所述框架机体的顶部设置有传感器模块。为解决搭载摄像设备的无人飞行器在进行垂直降落时受机身惯性产生冲击力,从而导致机身以及摄像结构受震动的问题,飞行器降落时平衡脚撑与地面接触的瞬间平衡脚撑会向内弯折,使整个框架机体下沉从而降低降落冲击对机体的影响,之后借助平衡脚撑内侧的伸缩摇臂来使其复位。
技术研发人员:杜绍林
受保护的技术使用者:安徽靓马信息科技股份有限公司
技术研发日:20231013
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!