用于运输容器的运输设备的制作方法
[0001]
本实用新型涉及一种带有多个圆盘(pucks)的用于运输容器的运输设备,圆盘分别被构造为用于容纳和竖立地运输容器,其中运输设备如下地构造,即,容器能借助圆盘朝着处理机的处理段地并且远离该处理段地运输,其中运输设备如下地构造,即,容器在经过处理段时从圆盘被取出。容器在处理机中沿处理段被运输并且在处理段处被处理。
背景技术:
[0002]
在处理容器时,在对应的处理机(例如贴标机、直接印刷机或检查机)中或在对应的处理机之间进行合适的容器运输是非常重要的。必须保证容器不翻到,并且在许多情况中还必须保证容器以预定的间隔和合适的定向被运输到处理机中。
[0003]
在此,困难之处在于具有复杂形状的容器,特别是不具有固有的竖立面或具有无法实现充分的稳定性的竖立面的容器。
[0004]
已知使用所谓的圆盘来单独地运输容器。圆盘是可更换的运输元件,运输元件分别具有底部和侧向支撑元件,侧向支撑元件侧向地支撑在底部上竖立的容器。特别地,圆盘可以是带有容纳部的杯形元件,在容纳部中容纳容器的下部分。在此,可以根据当前待处理的容器类型来选择带有容纳部形状的圆盘。因此,容器可以被竖立运输,并且在此通过对应的容纳部或侧向支撑元件来稳定容器。
[0005]
到目前为止,以此运输方式已经将圆盘运输到处理机,通过将容器从圆盘提起而将容器在此处转送到处理机。在处理机中容器例如在转盘上运行。在容器已经过处理机后,将容器分别再次竖立到圆盘内。容器从圆盘的取出例如通过举升星轮进行,举升星轮将容器从圆盘升高。
[0006]
在此典型地使用两个分开的回路,一个回路在处理机的前进侧上而另一个回路在处理机的返回侧上。这两个回路需要相对大的空间。除了高的空间需求之外还存在以下问题,即需要精确控制圆盘或圆盘流动,以在容器经过处理机之后再次将容器放入到圆盘内。控制必须保证每个圆盘都精确地处于正确的位置上,以在处理机的流出部内容纳容器。此设备和对应的控制方法相对复杂。
技术实现要素:
[0007]
因此,本实用新型所基于的任务是提供一种设备,该设备实现了节省空间的并且简单的结构,利用该结构在容器经过处理机之后可以被再次精确地放入到圆盘中。
[0008]
运输设备如下地构造,即,圆盘能从处理机的流入部直至处理机的流出部地围着处理机环绕地继续运输,在流入部处从圆盘取出容器,在流出部处将容器再次放入到圆盘中。
[0009]
所要求保护的运输设备的优点在于,为了将圆盘朝着处理机的处理段地并且远离该处理段地运输,仅需唯一的圆盘回路。这与两个单独的圆盘回路相比节省了空间,一方面因为圆盘围着处理机环绕地运输,即,圆盘在本来已被使用的区域中运输,而另一方面因为
不必将空圆盘远离处理机地和朝着处理机地运输,并且因此降低了空程。
[0010]
圆盘可以例如通过运输带或输送链被输送,运输带或输送链使得圆盘沿着运输段随动。原则上的另外的运输机制(例如磁性运输)也是可行的。
[0011]
运输设备可以被构造为使得圆盘在运行中沿处理段与容器垂直错开地特别是与容器同步地运送。
[0012]
当圆盘沿处理段与容器垂直错开地运输时,则优点是针对在处理机流入部和处理机流出部之间运输空圆盘在处理机外侧不需要附加的空间需求。因此可以保证理想的空间利用。
[0013]
例如,圆盘可以在容器下方被运送。其优点是因为用于竖立运输的圆盘被布置在容器下方并且容纳容器的下侧,所以转送容器所需的成本低。因此,根据圆盘的运送,必要时仅垂直地移动容器和/或圆盘足以将容器从圆盘取出或放入到圆盘中。
[0014]
运输设备可以被构造为在运行中为每个圆盘配属容器,并且使每个圆盘从处理机的流入部到处理机的流出部地与对应的容器同步运行,并且使圆盘和容器彼此垂直错开地运输。
[0015]
同步运行是指以如下方式运输圆盘,即,在经过处理段之后将容器再次放入到先前从其中取出容器的圆盘中。例如,运输设备可以被构造为使得圆盘在其围着处理机循环绕之后直接位于从该圆盘中取出的、已经经过处理段之后的那个容器的下方。
[0016]
特别地,同步运行可以包括在容器和对应的圆盘之间的相对位置仅沿垂直方向改变,从而圆盘精确地在相应配属的容器下方被运输。
[0017]
通过圆盘与容器沿处理段的同步运输,保证了圆盘和容器在流出部中的相对位置是合适的,由此可以将容器再次放入到对应的圆盘中,而无需附加的运输路径。因此,可以省去对圆盘的控制和附加的运输介质,并且空间要求低。此外,将容器与圆盘相配属能够对于质量保证过程(产品安全、产品责任、批次跟踪等)非常重要。
[0018]
运输设备可以包括运送装置,运送装置被构造为使得圆盘在运行中沿处理段与容器垂直错开地特别是与容器同步地被运送。特别地,运送装置可以包括携带星轮或转台马达。
[0019]
特别地,运送装置可以被构造为使得圆盘在运行中沿处理段与容器垂直错开地并且与容器同步地被运送。
[0020]
运送装置可以被构造为使得在运行中圆盘和从该圆盘被取出的容器之间的相对位置在沿处理段运输时保持不变。即在处理段的走向中,也就是说只要容器在处理机中被运输,则圆盘被运送从而圆盘相对于容器的相对位置不改变。因此保证圆盘和相应的容器在无进一步控制的情况下分别同时地并且在合适的位置上到达处理机的流出部中。
[0021]
运送装置可以被构造为使得在圆盘的位置和处理机的容器保持元件之间存在机械刚性的联接。这实现了圆盘和容器的运动的特别简单的同步,并且因此也实现了在经过处理段之后容器的简单并且精确的转送。容器保持元件原则上可以是在沿处理段运输时保持容器的任何元件,例如包括夹具或定心元件。
[0022]
运输设备可以包括至少一个圆盘升降装置,圆盘升降装置被构造为用于调节圆盘的垂直位置。因此,圆盘可以针对运输以围着处理机环绕的方式被引入到如下位置中,即,在该位置处圆盘不阻碍处理机中的处理步骤,特别是位于处理机的可运动的组成部分的作
用范围下方或外部。
[0023]
如上所述,运输设备被构造为使得容器在经过处理段时被从圆盘取出。为此,运输设备可以被构造为使得至少在从圆盘取出之后并且在转送到处理机之前以及在从处理机转接之后并且在转送到圆盘之前悬挂地运输容器。
[0024]
圆盘升降装置可以被构造为并且在运行中被布置为,在为了悬挂运输而抓取容器之处圆盘被降低和/或将圆盘如下地升高,即,在容器在悬挂运输之后被松开时圆盘处于容器的高度上。
[0025]
因此可以实现容器的特别可靠的转送,其中仅当容器实际上为了悬挂运输而被抓取时或被容器保持元件保持在处理机中时,容器才可以不被圆盘支撑。
[0026]
因此可以例如将运输设备构造为,在转送容器之后在流入部中将圆盘降低,圆盘在容器下方的平面中运送,并且在转接容器之前在流出部中将圆盘再次升高。
[0027]
在此应该注意的是,替代地可以通过容器升降装置将容器从圆盘升高,在圆盘上方的平面中运输,并且在流出部中再次降低并且放入到圆盘中。可构思到不同的另外的组合,例如在流入部中升高容器并且在流入中降低圆盘,并且对应地在流出部中降低容器并且升高圆盘。
[0028]
圆盘升降装置可以被构造为并且在运行中被布置为将圆盘降低到将容器从圆盘取出的程度,或者将圆盘升高到将容器放入到圆盘中的程度。
[0029]
这保证在处理段上圆盘不再与容器相互作用,即圆盘不再侧向地或在下方支撑容器,并且保证在将容器沿处理段运输之后在被松开之前将被安全地放入到圆盘中。
[0030]
至少一个圆盘升降装置可以包括第一圆盘升降装置,第一圆盘升降装置被构造为并且在运行中被布置为将圆盘降低到为了悬挂运输而抓取容器之处,并且至少一个圆盘升降装置可以包括第二圆盘升降装置,第二圆盘升降装置被构造为并且在运行中被布置为将圆盘如下地升高,即,在容器在悬挂运输之后被松开时,圆盘处于容器的高度上。
[0031]
两个单独的升降装置被设置,这保证了相对灵活的结构,这实现了处理机的流入部和流出部可以处于任何位置上。此外,可以单独地调节圆盘的对应的初始高度和结束高度。
[0032]
圆盘升降装置可以包括举升星轮。举升星轮在此是已经提供了升降机构的星轮,例如流入星轮、流出星轮或中间星轮。
[0033]
运输设备可以包括流入星轮、流出星轮和/或中间星轮,其中圆盘升降装置中的一个与流入星轮、流出星轮或中间星轮整体式地构造或固定在流入星轮、流出星轮或中间星轮上。
[0034]
圆盘升降装置可以包括第一圆盘升降装置和第二圆盘升降装置,并且第一圆盘升降装置可以与流入星轮整体式地构造或固定在流入星轮上,并且第二圆盘升降装置可以与流出星轮整体式地构造或固定在流出星轮上。
[0035]
在运行中,圆盘可以直接降低到流入的容器下方,而在此期间圆盘像容器一样围着流入星轮环绕。这特别地简化了上述圆盘的同步运输,因为相对位置仅沿垂直方向改变而沿水平方向通过流入星轮的几何形状预先确定。这类似地适用于流出星轮,因为在此圆盘于是在流出的容器的正下方围着流出星轮环绕,并且在此过程中被升高。
[0036]
圆盘升降装置可以与中间星轮整体式地构造或固定在中间星轮上,并且圆盘升降
装置被构造为并且在运行中被布置为,为了转送容器而升高以便进行悬挂运输,和/或在悬挂运输之后在转接容器之后降低圆盘。特别地,中间星轮可以呈举升星轮形式地构造,例如用于升高圆盘或容器。例如,如果中间星轮包括圆盘升降装置,则运输设备可以包括抓取装置,抓取装置例如可以是中间星轮的部件或被安装在中间星轮上。于是抓取装置可以被构造为包括抓取元件,其中抓取元件在运行期间将容器从圆盘取出并将容器转送到流入星轮。然后流出星轮将容器再次转送到抓取元件中的一个上。抓取元件将容器再次放入到圆盘中。
[0037]
中间星轮在此是当转送到流入星轮和/或从流出星轮转接时形成流入星轮和/或流出星轮的配对件的星轮。
[0038]
特别地,可以设有中间星轮,中间星轮被构造为用于将容器转送到流入星轮并且同时从流出星轮取出容器。然后,圆盘升降装置可以与中间星轮整体式地构造或被固定在中间星轮上,并且圆盘升降装置可以被构造用于在处理机的流入部中降低圆盘的同时在处理机的流出部中升高圆盘。
[0039]
迄今为止已知,流入星轮和流出星轮分别配属有各自的中间星轮,利用中间星轮将容器转送到流入星轮或从流出星轮取出容器。如上所述的、同时配属给流入部和流出部的中间星轮相比之下的优点是可以节省一个中间星轮。由此实现更低的投资成本、更低的运行成本,在全套设备更换时更短的更换时间和更小的空间需求。当中间星轮是举升星轮时,这一点尤其明显。举升星轮具有相对较高的制造成本。因此,如果设置举升星轮以用于同时转送和取出容器,则可以特别明显地降低投资成本。
[0040]
可以设有适配板,借助适配板可以调节星轮位置。星轮位置取决于处理机的螺距间距和中心星轮的分度圆,其中中心星轮的分度圆直径取决于所需的行程和圆盘的长度以及螺距的数量和长度。
[0041]
运输设备可以包括:多个抓取元件,抓取元件被构造为用于抓取容器以进行悬挂运输;以及抓取元件升降装置,抓取元件升降装置被构造为并且在运行中被布置为使得抓取元件在抓取容器之后被升高到将容器从圆盘取出的程度,和/或使得抓取元件在悬挂运输之后在松开容器之前被降低到将容器放入到圆盘中的程度。
[0042]
以上结合圆盘升降装置提及的特征在此对应地适用。即,例如抓取元件升降装置可以与流入星轮、流出星轮或中间星轮整体式地构造或可以固定在流入星轮、流出星轮或中间星轮上。类似于用于圆盘的升降装置地,抓取元件升降装置可以被构造为一件式或多件式。
[0043]
如果运输设备在处理机的流入部或流出部中分别包括抓取元件升降装置和圆盘升降装置,则可以将二者构造为使得圆盘和抓取元件沿垂直方向相反地运动。以此方式可以在降低圆盘的同时升高抓取元件,反之亦然。特别地,两个升降装置可以被整体式地构造在刚好一个星轮中,或者可以固定在刚好一个星轮上。这特别地节省空间。
[0044]
一种用于例如利用上述设备中的一个运输圆盘和容器的可能的方法,方法包括:将容器分别在圆盘中竖立运输至处理机的处理段、沿处理段运输、并且分别在圆盘中竖立地从处理段运输离开,其中,容器在经过处理段时被从圆盘取出。圆盘从处理机的流入部直至处理机的流出部地围着处理机环绕地继续运输,在流入部处从圆盘取出容器,在流出部处将容器再次放入到圆盘中。
[0045]
圆盘可以沿着处理段与容器垂直错开地特别是与容器同步地被运送。
[0046]
至少在从圆盘取出之后并且在转送到处理机之前以及在从处理机转接之后并且在转送到圆盘之前可以悬挂地运输容器。在容器被抓取以悬挂运输时可以降低圆盘,并且在沿处理段运送之后如下地升高圆盘,即,在悬挂运输之后松开容器时,圆盘处于容器的高度上。替代地或补偿地也可以类似于结合设备所述的情况地升高容器并且然后再次降低容器。
[0047]
圆盘可以如下地运输,即,在悬挂运输之后转接容器时圆盘分别被直接布置在容器的下方,也就是不与容器水平错开地布置。
[0048]
不言而喻,结合装置所述的特征和优点也可应用于该方法。
附图说明
[0049]
下面根据示例性的附图阐述另外的特征和优点。其中:
[0050]
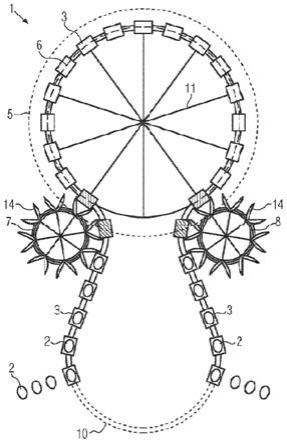
图1a和1b示出运输设备的实施例的示意性的、未按比例的俯视图和斜视图;
[0051]
图2示出第一升降装置的示意性的、未按比例的斜视图;
[0052]
图3示出第二升降装置的示意性的、未按比例的斜视图。
具体实施方式
[0053]
图1示出了用于运输容器2的运输设备1的实施方式,运输设备带有多个用于容纳和竖立地运输容器的圆盘3。
[0054]
如在图1b的斜视图中可见,圆盘被构造为使得容器的下部分竖立在容纳部中并且通过容纳部的壁侧向支撑。
[0055]
圆盘例如借助布置在圆盘下方的用于输送圆盘的一个或多个运输带被运输,例如通过圆盘的随动。一个或多个运输带典型地水平运行,即运输带不与圆盘一起被升高。为了在不同的平面上实现圆盘的运输,可以在处理段的区域内设有与流入部和流出部不同的运输带,并且两个运输带可以在不同的高度上运行。作为运输带的替代,例如也可以设有一个或多个输送链或其他输送元件。
[0056]
在此示例性地在圆盘中示出呈瓶的形式的容器,其中圆盘也可以被构造为用于运输另外的容器。
[0057]
应该注意的是,在图1a的俯视图中,其中刚取出容器的圆盘以阴影图示,而在容器在圆盘中被竖立地运输的区域中图示了容器,并且在容器在处理机中被从圆盘取出地运输的区域中未示出无容器的圆盘。
[0058]
在图1a中此外示出了处理机5,处理机5不是运输设备的部件,并且此外示出了处理段,处理段在此被标识为带有附图标记6的虚线。处理段从处理机的流入部延伸到处理机的流出部,特别地在此处所示的示例中从流入星轮7延伸到流出星轮8。处理机可以是圆形转子。处理机可以例如是直接印刷机、贴标机或检查机。在处理机内容器沿处理段被运输和处理,例如被印刷、贴标或检查。
[0059]
在此,该运输设备被构造为使得容器在经过处理段时从圆盘上被取出,并且例如被处理机的保持元件保持。
[0060]
运输设备被构造为使得容器可通过圆盘被运输到处理段并且从处理段被运输离
开。
[0061]
特别地,运输设备沿以附图标号10标识的运输段运输圆盘,并且运输设备被构造为使得圆盘能从处理机的流入部(在运行时在此处从圆盘取出容器)直至处理机的流出部(在运行时在此处将容器再次放入到圆盘中)地围着处理机环绕地继续运输。
[0062]
在图1b中示例性地示出,在容器下方的处理段的区域中的圆盘垂直于容器地错开并且与容器同步地被进一步运输。
[0063]
在图1a和1b中所示的示例中,圆盘的运输段延伸到处理机的流入部,特别是延伸到流入星轮,并且部分地围绕流入星轮地延伸。然后,如上文所阐述地,运输段平行于容器的处理段地延伸,使得在运行中圆盘垂直向下地错开并且与容器同步地被运输。运输段延伸至处理机的流出部,在此特别地延伸至流出星轮,并且部分地围绕流出星轮。然后,运输段从处理机延伸离开。
[0064]
在此示例中圆盘的运输段形成在此以虚线表示的回路,以便示出运输段的剩余走向(即在处理机的流入部之前或流出部之后)对于本实用新型而言不是决定性的。应注意的是可以在运输段上的任何位置上添加和取出容器。
[0065]
在上述示例中,即其中圆盘在容器下方并且与容器同步地被运输的示例中,在沿处理段运输时,圆盘与从所述圆盘取出的容器之间的相对位置保持不变。
[0066]
在图1中也示出了运输设备包括运送装置11,运送装置11被构造为沿处理段运送带有容器的圆盘,在此示例中运送装置与容器同步并且垂直于容器地向下错开。
[0067]
例如,可以将运送装置构造为使得在圆盘的位置与处理机的容器保持元件12之间存在刚性联接。这些保持元件可以是例如抓取容器的夹具,或如在图中所示是用于容器的定心元件。在圆形转子的情况中,保持元件可以例如被固定在转盘上或是转盘的部件。
[0068]
在此所述的圆形转子的示例中,示出了呈携带星轮的形式的运送装置。在此示例中,携带星轮将处理机的转盘的转动与圆盘的运动刚性地联接,在转盘上固定了容器保持元件并且因此在运行中转盘运输容器。替代地,例如也可以使用转台马达以用于运送。
[0069]
此外,也可构思将圆盘的运输段构造为不需要运送装置,例如构造为仅通过圆盘的间距和运输段的长度以及圆盘的运输速度来确保圆盘在合适的时刻再次到达处理机的流出部的对应的位置上。原则上也可以进行对应的控制。
[0070]
在上文中以及在图1b中所示的示例中,圆盘垂直于容器错开地被运输。为产生垂直错开,运输设备可以包括至少一个圆盘升降装置,圆盘升降装置被构造为调节圆盘的垂直位置。圆盘升降装置13在此仅示意性地示出。圆盘升降装置的可能构造在图2和图3中示出。
[0071]
在此处所示的示例中,容器至少在从圆盘取出之后并且在转送到处理机处之前以及在从处理机转接之后并且在转送到圆盘之前被悬挂运输。
[0072]
在图1中所示的运输设备包括至少两个圆盘升降装置。第一圆盘升降装置被构造为并且在运行中被布置为在抓却容器以进行悬挂运输之处将圆盘降低。即第一圆盘升降装置在此被布置在处理机的流入部内。第二圆盘升降装置被构造为并且在运行中被布置为将圆盘升高,使得当容器在悬挂运输之后被放开时圆盘处于该容器的高度上。即第二圆盘升降装置在此被布置在处理机的流出部内。
[0073]
第一圆盘升降装置被构造和布置为将圆盘降低到从圆盘取出容器的程度。在此,
例如将圆盘降低至少直至使得用于容器的容纳部的上边缘被布置在容器的下边缘下方。在实践中,圆盘降低的程度取决于处理机被如何构造。应保证圆盘不会妨碍处理机的功能。
[0074]
第二圆盘升降装置在此被构造和布置为将圆盘升高到将容器放入到圆盘内的程度。即圆盘被升高到使得当容器被放开时容器可以再次被容纳在容纳部内的程度。
[0075]
应注意的是也可构思不降低圆盘或并非仅降低圆盘并且然后再次升高圆盘,而是替代地或补充地升高容器并且然后再次降低圆盘。为此,可以提供在此未示出的抓取元件升降装置,抓取元件升降装置升高和/或降低多个被构造为用于抓取容器以进行悬挂运输的抓取元件 14。
[0076]
图2示出了圆盘升降装置的一种可能的实施方式,圆盘升降装置可以用于上述运输设备或根据本实用新型的另外的运输设备。
[0077]
在此示例中,将圆盘升降装置固定在星轮上,例如固定在流入星轮、流出星轮或中间星轮上。在图中示例地示出流入星轮7,其中可以类似地构造用于其他类型的星轮的圆盘升降装置。
[0078]
在图中示出了流入星轮的抓取元件14,抓取元件14被构造为用于抓取容器2以进行悬挂运输。在此示例中容器未被升高,并且对应地不存在抓取元件升降装置。但是可以选择地为抓取元件设有此升降装置。
[0079]
在抓取元件的下方设有用于容纳圆盘的容纳元件15,容纳元件15 在此例如可垂直移动地被安装在垂直延伸的杆16上。容纳元件向上并且向前打开,并且被构造为可以分别容纳圆盘3。选择地,如此处所示,容纳部可以具有后壁,垂直杆穿过后壁延伸。容纳部沿流入星轮向下引导圆盘,为此例如可以设有弯曲引导部17。此外,在图中图示了引导元件4,导向元件沿周向布置在星轮上,使得被运输到容纳部中的圆盘可以不向外地从容纳部滑出。
[0080]
在所示的示例中,容器通过曲线引导部沿垂直延伸的杆被向下引导运动。在此圆盘通过容纳部支撑,并且通过引导部4被降低。弯曲引导部可以被布置和构造为使得在圆盘已沿垂直延伸的杆下降之后将 (现在空的)容纳部升高到更高的位置,在该更高的位置中容纳流入的圆盘。
[0081]
图3示意性地示出了圆盘升降装置的另一可能的实施方式,其可以用于上述运输设备或根据本实用新型的另外的运输设备。此处,圆盘升降装置被构造为降低用于转送容器的圆盘以进行悬挂运输,并且在悬挂运输之后在转送容器之后升高圆盘。
[0082]
在此示例中,运输设备包括一个中间星轮18,中间星轮18在此示例中是流入星轮和流出星轮的配对件。替代地,也可以为流入星轮和流出星轮分别设有中间星轮。
[0083]
在此,中间星轮呈举升星轮形式地构造,而圆盘升降装置包括举升星轮。在此,使用与流入星轮类似的机构来升高圆盘。弯曲引导部在此被构造为使得圆盘在流入侧被降低并且在流出侧又被合适地升高,这可以根据与上述结合流入星轮所述的相同的原理工作。因此,不需要同时构造流入星轮和流出星轮来升高或降低圆盘。而是对应地构造单个星轮即中间星轮足以。也可构思由中间星轮替代地或补充地升高和降低容器。
[0084]
在上述示例中,可以设有带有耐磨条的固定的引导弓形件,以用于在运输带上引导圆盘,所述耐磨条根据需要被布置在不同的高度上。
[0085]
在上述示例中示出了圆盘,圆盘具有在对置的外壁上选择地设有的凹槽。在引导
弓形件上或在举升星轮上例如在弯曲引导部上可以固定(在此未示出的)引导轨,引导轨嵌接到圆盘的凹槽中。由此可以稳定圆盘,并且特别地可以保证在取出容器时相应的圆盘不从运输带被升高。
[0086]
为了当在举升星轮中取出时将圆盘保留在子部件上,可以选择地在举升星轮上设有图中未示出的携带盘形件,携带盘形件运送圆盘。
[0087]
下文将描述用于运输容器的示例性方法。所述方法可以例如通过使用上述设备之一来执行。
[0088]
在示例性方法中,分别将容器在圆盘中竖立地运输至处理机的处理段,沿处理段运输容器,并且将容器分别在圆盘中竖立地从处理段运输离开。在此,容器在经过处理段时被从圆盘取出。在此圆盘从处理机的流入部(在运行时在此处从圆盘取出容器)直至处理机的流出部(在此处将容器再次放入到圆盘中)地围着处理机形地继续运输。
[0089]
特别地,圆盘可以沿处理段与容器垂直错开地被运送。即,圆盘可以例如在容器下方并且平行于容器的处理段地被运输,特别是与容器同步地被运输。
[0090]
至少在从圆盘取出容器之后并且在将容器转送到处理机处之前,以及在从处理机转接容器之后并且在将容器转送到圆盘上之前,可以悬挂地运输容器。此外,容器也可以选择地在处理机中被悬挂运输。
[0091]
容器可以特别地在处理机的流入部的区域内被抓取以进行悬挂运输,并且然后可以将圆盘降低到将容器完全从圆盘取出的程度。然后,在容器经过处理段期间圆盘可以在此高度上进一步运行,并且在容器已经经过处理段时可以再次升高圆盘。然后,可以在处理机的流出部中将容器再次放入到圆盘中以进行竖立运输。
[0092]
为此将圆盘升高,使得在松开容器时圆盘处于容器的高度上。换言之,仅当圆盘再次支撑容器时才松开容器。
[0093]
合适的降低和升高可以例如通过与设备结合描述的圆盘升降装置来进行。
[0094]
圆盘如下地运输,即,在转接容器时圆盘被直接布置在容器下方,即,不与容器水平错开。这例如可以通过合适的控制或以与设备相结合的上述运送装置来进行。
[0095]
替代地或附加地,也可以将容器升高然后再次降低,如类似于结合设备所描述的情况。
[0096]
不言而喻,前述实施例中提到的特征不限于这些特殊组合,并且可以以任何其他的组合来实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1