自动化天车防撞系统及方法与流程
1.本发明涉及半导体集成电路中自动物料搬送系统(amhs,automated material handling system)技术领域,具体涉及一种自动化天车防撞系统及方法。
背景技术:
2.半导体集成电路中的自动物料搬送系统(amhs,automated material handling system)是用于承载一批批半导体产品,在各操作设备或仓储柜之间进行传送,以此避免了传统人工搬运的效率低下问题,并确保了生产厂房内的洁净,因此自动化物料搬运系统已经成为半导体制造工厂中必要的配备之一。
3.自动化物料搬运系统中的核心载体是自动化天车(oht,overhead hoist transfer),天车装置常常被用来搬运放置晶圆的晶圆盒。
4.自动化天车工作时具有较高的走行速度,例如,clw08-v2型自动化天车在直道走行过程中的最高速度为300m/min,当自动化天车高速走行时,如果有人或物体突然出现在自动化天车前面时,就会造成人员被撞伤或自动化天车被撞坏风险。
5.目前采取措施有以下两种方式:
6.1、在没有机台位置的轨道处安装防护网(在有机台需要移载的位置因为不能影响机台上下货,将不能安装防护网),可以起到防撞作用,但是到底安装在多高的位置,才可以满足即不影响上方天车在机台上的移栽,又能提供给下方较高的活动区域,难以统一,并且由于防护网较重非常不便于拆装,灵活性较差,大范围应用的可操作性不强;
7.2、在每条分区(bay)(工序)轨道的入口处安装限高牌,以提示工作人员注意安全,但只能起到警示作用。
技术实现要素:
8.基于此,有必要针对上述的自动物料搬送系统中自动化天车易被撞损坏的风险问题,提供一种自动化天车防撞系统及方法,可以提高天车的使用安全性能,并且灵活性好,可大范围应用可操作性强。
9.为实现上述目的,本发明提供一种自动化天车防撞系统,其特征是,包括:
10.行驶轨道;
11.可移动的安装于行驶轨道的天车;
12.光电感应装置,设置在所述行驶轨道下方,用于在所述行驶轨道下方形成保护区域,以及用于在侦测到异物进入保护区域时输出反馈信号;
13.控制系统,连接所述天车以及所述光电感应装置,所述控制系统用于在接收到所述反馈信号时控制相应工作的天车停止移动。
14.在上述的自动化天车防撞系统中,通过在天车行驶轨道下方设置光电感应装置,利用光电感应装置采集信号,侦测是否有异物进入保护范围区域,再在侦测到异物进入时,通过控制系统对天车进行停止移动的控制,可以很好的规避天车被异物撞到的风险,减少
可能对登高操作人员、工件或天车本体造成的伤害,并且这种监控方式准确及时,可有效提高天车的使用安全性能,灵活性好,可操作性强,大范围应用前景好。
15.上述的自动化天车防撞系统,其中,还包括:
16.无线传输设备,分别连接所述的光电感应装置以及控制系统,用于所述光电感应装置与所述控制系统之间的无线信号传输。
17.上述的自动化天车防撞系统,其中:
18.沿所述行驶轨道延伸的方向依次设置多个所述的光电感应装置,以在沿所述行驶轨道延伸的方向上形成多个所述保护区域。
19.上述的自动化天车防撞系统,其中:
20.相邻两个所述的光电感应装置之间设置的间隔距离为5m~8m;
21.所述光电感应装置位于所述天车的下方,且所述光电感应装置与所述天车底部的间距为10cm~15cm。
22.上述的自动化天车防撞系统,其中:
23.所述的自动化天车防撞系统还包括机台,所述行驶轨道位于所述机台的上方,以确保所述天车可在所述机台上移载晶圆盒;
24.所述控制系统还用于识别正在所述机台上进行所述晶圆盒移载的所述天车的位置,并屏蔽处于正在所述机台上进行所述晶圆盒移载的所述天车所在位置的所述光电感应装置。
25.上述的自动化天车防撞系统,其中:
26.所述控制系统用于在接收到所述反馈信号时,控制位于侦测到所述异物的所述光电感应装置前一组所述保护区域上方的所述天车停止移动。
27.上述的自动化天车防撞系统,其中:
28.所述光电感应装置包括:发射单元、接收单元及反馈单元;所述发射单元与所述接收单元沿所述行驶轨道延伸的方向平行间隔排布,所述反馈单元与所述接收单元相连接;其中,
29.所述发射单元用于发射侦测光以于所述发射单元与所述接收单元之间形成光幕;所述接收单元用于接收侦测光;所述反馈单元用于在所述光幕被异物遮挡时输出所述反馈信号。
30.本发明还提供一种自动化天车防撞方法,其特征是,包括:
31.在天车沿行驶轨道移动的过程中,当侦测到有异物进入光电感应装置形成的保护区域时,形成反馈信号;
32.基于所述反馈信号控制相应工作的天车停止移动。
33.上述的自动化天车防撞方法,其中,还包括:
34.在天车沿行驶轨道移动的过程中,自动识别出正在机台上进行晶圆盒移载的所述天车的位置,并屏蔽处于正在所述机台上进行所述晶圆盒移载的所述天车所在位置的所述光电感应装置。
35.上述的自动化天车防撞方法,其中:
36.所述保护区域的数量为多个;
37.当侦测到有异物进入光电感应装置形成的保护区域时,控制位于侦测到所述异物
的所述光电感应装置前一组所述保护区域上方的所述天车停止移动。
附图说明
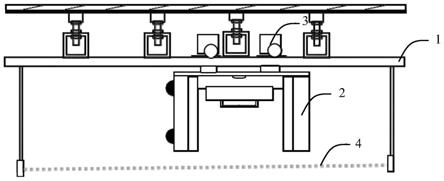
38.图1为本发明的自动化天车防撞系统的整体结构示意图;
39.图2为本发明的一实施例中的自动化天车防撞系统中的光电感应装置的整体结构示意图;
40.图3为本发明的一实施例中自动化天车防撞系统的整体结构示意图;
41.图4为本发明的另一实施例中自动化天车防撞系统的整体结构示意图;
42.图5为本发明的自动化天车防撞方法的流程图。
具体实施方式
43.本发明是基于使用供电线的非接触供电方式的天车系统来完成的,天车系统通常设置于半导体工厂等的洁净室等,用于晶圆盒等工件进行输送。
44.请参阅图1、图3,在一个实施例中,本发明提供了一种自动化天车防撞系统,所述的自动化天车防撞系统包括:行驶轨道1、可移动的安装于行驶轨道的天车2、光电感应装置4以及控制系统7;
45.所述的行驶轨道1通过多个支柱从顶棚悬挂;
46.所述的天车2通过行驶部安装于所述的行驶轨道1,行驶部通常包括导向轮3;
47.所述的光电感应装置4设置在所述行驶轨道1下方,用于在所述行驶轨道1下方形成保护区域,以及用于在侦测到异物进入保护区域时输出反馈信号;为了不会影响天车2的行驶,所述的光电感应装置4可以通过支柱从行驶轨道1上悬挂;
48.所述的控制系统7连接所述天车2以及所述光电感应装置4,所述控制系统7用于在接收到所述反馈信号时控制相应工作的天车2停止移动,所述的控制系统7可以由现有的天车控制系统来实现。
49.上述的自动化天车防撞系统中,通过在天车2行驶轨道1下方设置光电感应装置4,利用光电感应装置4采集信号,侦测是否有异物进入保护范围区域,再在侦测到异物进入时,通过控制系统7对相应天车2进行停止移动的控制,可以很好的规避天车被异物撞到的风险,减少可能对操作人员、工件或天车本体造成的伤害,并且这种监控方式准确及时,可有效提高天车的使用安全性能,灵活性好,可操作性强,大范围应用前景好。
50.如图3所示,在一个示例中,所述的自动化天车防撞系统还包括:无线传输设备5,分别连接所述的光电感应装置4以及控制系统7,用于所述光电感应装置4与所述控制系统7之间的无线信号传输,所述的无线传输设备5可以包括但不限于无线热点(access point),这样,通过无线传输的方式即避免了复杂的布线又方便了后期维护。
51.如图3所示,在一个示例中,沿所述行驶轨道1延伸的方向依次设置多个所述的光电感应装置4,以在沿所述行驶轨道1延伸的方向上形成多个所述保护区域,以使得保护区域范围覆盖整个天车系统。
52.较佳的,相邻两个所述的光电感应装置4之间设置的间隔距离为5m~8m,相邻光电感应装置4之间适当的间隔距离可以为工人提供一定的空中操作区域,同时在不影响防撞效果的前提下降低系统成本。所述光电感应装置4位于所述天车2的下方,且所述光电感应
装置4与所述天车2底部的间距为10cm~15cm,以提供给天车2在移载工件时,不碰触到工件底部的安全距离。
53.如图4所示,在一个示例中,所述的自动化天车防撞系统还包括机台9,所述行驶轨道1位于所述机台9的上方,以确保所述天车2可在所述机台上移载工件8,这里所说的工件包括但不限于晶圆盒;
54.在一个示例中,所述控制系统7还用于识别正在所述机台9上进行所述晶圆盒移载的所述天车2的位置,并屏蔽处于正在所述机台9上进行所述晶圆盒移载的所述天车2所在位置的所述光电感应装置4,以避免移载过程中其他工作中的天车2发生不必要的误停进而影响工作效率。
55.在一个示例中,所述控制系统7用于在接收到所述反馈信号时,控制位于侦测到所述异物的所述光电感应装置4前一组所述保护区域上方的所述天车2停止移动,所述的前一组指的是天车2行走方向上的前方第一组;
56.在另一个示例中,所述的控制系统7用于在接收到所述反馈信号时,控制位于侦测到所述异物的所述光电感应装置4所在位置上方的所述天车2停止移动;
57.在又一个示例中,所述的控制系统7用于在接收到所述反馈信号时,控制位于侦测到所述异物的所述光电感应装置4所在位置上方的天车2以及前一组所述保护区域上方的所述天车2停止移动;
58.在又一个示例中,所述的控制系统7用于在接收到所述反馈信号时,控制位于侦测到所述异物的所述光电感应装置4所在位置上方的所述天车2以及,位于与侦测到异物的所述光电感应装置4相邻的两个光电感应装置4所在位置上方的所述天车2停止移动。
59.所述的控制系统7通常是通过集线器(hub)来接收来自天车2的运行情况信号,以及通过集线器发送控制信号给天车2以控制天车2的工作与否。
60.如图2所示,所述光电感应装置4通常包括:发射单元41、接收单元42及反馈单元(图中未显示);所述发射单元41与所述接收单元42沿所述行驶轨道1延伸的方向平行间隔排布,所述反馈单元与所述接收单元42相连接;其中,所述发射单元41用于发射侦测光43以于所述发射单元41与所述接收单元42之间形成光幕;所述接收单元42用于接收侦测光43;所述反馈单元用于在所述光幕被异物遮挡时输出所述反馈信号,例如,在一个示例中,在所述接收单元42接收的所述侦测光43的光强小于所述发射单元41发射的所述侦测光43的光强时判定所述侦测光43被异物遮挡。所述的光电感应装置4包括但不限于光电安全保护装置(light curtain),当采用的是光电安全保护装置时,其工作原理是,所述的发射单元41包括多个红外发射管,所述的接收单元42包括对应多个发射管设置的一样数量的红外接纳管。当同一条直线上的红外发射管、红外接纳管之间没有障碍物时,红外发射管宣布的调制信号(光信号)顺畅抵达红外接纳管。红外接纳管接纳到调制信号后,相应的内部电路输出低电平,而在有障碍物的情况下,红外发射管宣布的调制信号(光信号)不能顺畅抵达红外接纳管,这时该红外接纳管接纳不到调制信号,相应的内部电路输出为高电平。当光幕中没有物体经过期,所有红外发射管宣布的调制信号(光信号)都能顺畅抵达另一侧的相应红外接纳管,从而使内部电路悉数输出低电平。这么,经过对内部电路状况进行分析就可以检查到物体存在与否的信息。
61.如图5所示,本发明还提供一种自动化天车防撞方法,其包括:
62.s1、在天车2沿行驶轨道1移动的过程中,当侦测到有异物进入光电感应装置4形成的保护区域时,形成反馈信号;
63.s2、基于所述反馈信号控制相应工作的天车停止移动。
64.在一个示例中,所述的自动化天车防撞方法中,在步骤s2之后,还包括:
65.s3、当侦测到异物离开光电感应装置4形成的保护区域时,控制相应停止移动的天车继续工作。
66.在另一个示例中,所述的自动化天车防撞方法还包括:
67.在天车3沿行驶轨道2移动的过程中,自动识别出正在机台9上进行晶圆盒移载的所述天车2的位置,并屏蔽处于正在所述机台9上进行所述晶圆盒移载的所述天车2所在位置的所述光电感应装置4。
68.在另一个示例中,所述的自动化天车防撞方法,其中:
69.所述保护区域的数量为多个;当侦测到有异物进入光电感应装置4形成的保护区域时,控制位于侦测到所述异物的所述光电感应装置4前一组所述保护区域上方的所述天车2停止移动。
70.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
71.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1