一种智能垃圾桶测试装置及测试方法与流程
1.本发明涉及智能垃圾桶技术领域,尤其是涉及一种智能垃圾桶测试装置及测试方法。
背景技术:
2.目前市面上很多智能垃圾桶都有自动开盖功能
---
即垃圾桶通过某种感应方式(如红外感应、触摸感应、接近感应等)来获得开启垃圾桶盖子的信号,然后执行开盖子的动作。
3.由于产品生产过程中需要测试小盖性能寿命,如小盖开合寿命测试。此测试项主要旨在测试垃圾桶盖子的疲劳寿命和在开合过程中是否有概率性存在如盖子开启不到位等功能不良。同时,也需要测试垃圾桶的感应装置是否稳定有效
---
如感应的及时性和感应距离等参数。
4.目前智能垃圾桶的测试通常是采用人工测试方式,还存在测试效率低、测试结果不全面等问题。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种效率高、准确的智能垃圾桶测试装置及测试方法。
6.本发明的目的可以通过以下技术方案来实现:
7.一种智能垃圾桶测试装置,包括:
8.框架;
9.控制机构,设置于所述框架上;
10.摆杆,与所述控制机构连接,该摆杆与地面间的空间形成待测垃圾桶的放置空间,所述摆杆在控制机构的作用下在设定角度内摆动;
11.红外感应器,与所述控制机构连接,并设置于所述框架上,所述红外感应器的位置与所述待测垃圾桶在翻开状态下的桶盖的位置相匹配。
12.进一步地,所述控制机构包括相连接的控制器与舵机,所述控制器与红外感应器连接,所述舵机与摆杆连接。
13.进一步地,所述摆杆的自由端连接有一可调整位置的方形板。
14.进一步地,所述方形板套设于摆杆端部,并通过卡扣方式固定。
15.进一步地,所述红外感应器可调节高度地连接于所述框架上。
16.进一步地,该装置还包括与控制机构连接的显示器。
17.进一步地,该装置还包括与控制机构连接的蜂鸣器。
18.进一步地,所述控制器采用atmega328p单片机。
19.进一步地,所述框架底部设置有待测垃圾桶放置位。
20.本发明还提供一种采用所述的测试装置的智能垃圾桶测试方法,包括以下步骤:
21.定位待测垃圾桶,调节红外感应器的位置和摆杆的运动范围,控制机构控制摆杆的位置,循环触发待测垃圾桶的智能开盖功能,基于所述红外感应器的反馈结果,记录在设定测试时间内的触发次数、开盖次数以及桶盖回落次数,从而获得待测垃圾桶的测试结果。
22.进一步地,若在一次触发过程中,超过设定时间未收到红外感应器的反馈结果,则控制机构产生报警提醒。
23.与现有技术相比,本发明具有如下有益效果:
24.1、本发明通过控制机构及摆杆的设定,自动模拟用户手部动作,即可触发垃圾桶的红外开盖功能,有效提高了测试效率,有效解决了带有红外开盖功能的垃圾桶的测试问题,解决了人工测试带来的标准不统一,测试成本高昂等问题。
25.2、本发明红外传感器可调节高度,方便适用于不同尺寸垃圾桶及感应位置不同的垃圾桶的测试,适用性强。
26.3、本发明摆杆端部设置可移动的方形板,有效模拟手部动作的同时,方便测试获得垃圾桶感应的最大感应距离。
27.4、本发明具有显示器,方便在测试过程中及时查看测试结果。
28.5、本发明具有蜂鸣器,在发现待测垃圾桶存在故障时能够及时反馈。
29.6、本发明测试装置占用面积跟小,安置更加方便。
30.7、本发明可以涵盖垃圾桶感应器的稳定性、及时性和垃圾桶桶盖开合的稳定性等项目。
附图说明
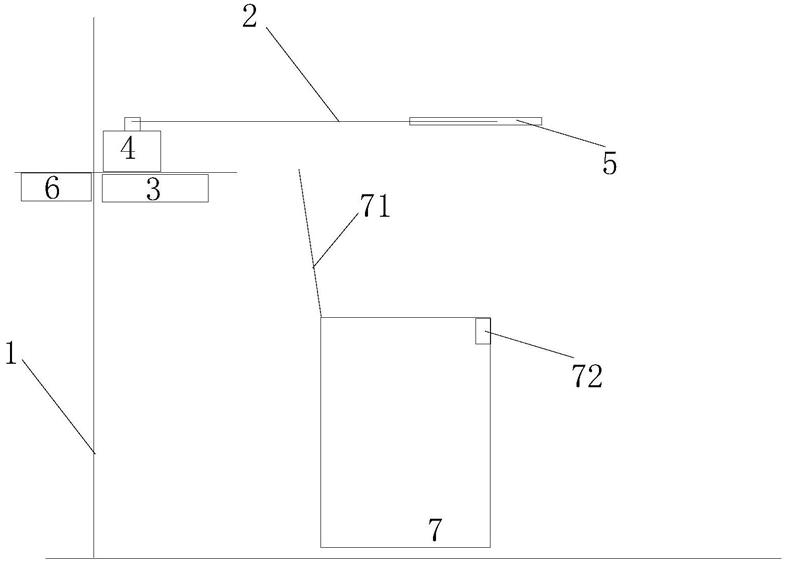
31.图1为本发明的结构示意图;
32.图2为本发明实施例中检测时的俯视图;
33.图3为本发明测试过程示意图。
具体实施方式
34.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
35.如图1所示,本实施例提供一种智能垃圾桶测试装置,包括框架1、控制机构、摆杆2和红外感应器3,控制机构设置于框架1上,摆杆2与控制机构连接,红外感应器3与控制机构连接,并设置于框架1上,框架1底部设置有待测垃圾桶放置位,所述摆杆2与地面间的空间形成待测垃圾桶7的放置空间,摆杆2在控制机构的作用下在设定角度内摆动;所述红外感应器3的位置与待测垃圾桶在翻开状态下的桶盖的位置相匹配,以实现对桶盖71的检测。
36.本实施例中,控制机构包括相连接的控制器与舵机4,控制器与红外感应器3连接,舵机4与摆杆2连接。控制器选用atmega328p,并搭配外围电路。
37.摆杆2的自由端连接有一可调整位置的方形板5,方便模拟用户手部动作。在某实施例中,方形板5套设于摆杆2端部,并通过卡扣方式固定。
38.摆杆2可根据需要设置为左右摆动和/或上下摆动。如图2所示,本实施例中摆杆以在垃圾桶顶部73上左右摆为例,位置a为摆杆初始位置,a’为摆杆摆到垃圾桶感应位置,b为
垃圾桶感应区域。
39.红外感应器3可调节高度地连接于框架1上,方便适用不同于尺寸垃圾桶。
40.在另一实施例中,该装置还包括与控制机构连接的显示器6。
41.在另一实施例中,该装置还包括与控制机构连接的蜂鸣器,在检测到任意不良后,通过蜂鸣器提示测试员异常情况。做到实时反馈。
42.本装置测试的待测垃圾桶可通过红外、触摸或接近感应方式。本实施例以红外感应的垃圾桶为例,待测垃圾桶上设置有垃圾桶红外感应器72。
43.采用上述测试装置的智能垃圾桶测试方法包括以下步骤:定位待测垃圾桶,调节红外感应器3的位置和摆杆2的运动范围,控制机构控制摆杆2的位置,循环触发待测垃圾桶的智能开盖功能,基于红外感应器3的反馈结果,记录在设定测试时间内的触发次数、开盖次数以及桶盖回落次数,从而获得待测垃圾桶的测试结果。若在一次触发过程中,超过设定时间未收到红外感应器3的反馈结果,则控制机构产生报警提醒。
44.如图3所示,该测试方法具体为:
45.步骤s01,舵机控制摆杆回到初始位置,控制器内的计时器开始计时;
46.步骤s02,判断计时器的累计计时是否到计时时间,若是,则重新计时,若否,则执行步骤s03;
47.步骤s03,将摆杆摆到垃圾桶触发位置;
48.步骤s04,控制器启动另一计时器,判断红外传感器的反馈时间是否超时,若是,则产生报警提醒,测试结束,垃圾桶开盖功能出现一次不良,若否,则执行步骤s05;
49.步骤s05,判断红外传感器是否检测到桶盖71,若是,则桶盖测试通过次数加1,控制摆杆摆回初始位置,准备进行下一次开盖功能检测;
50.步骤s06,当控制舵机使摆杆回到初始位置时,垃圾桶内的红外感应器由于不再能检测到摆杆,垃圾桶的桶盖应该关闭,此时,采用如步骤s04、s05的方式进行类似检测,单片机的计数器也随着摆杆回位进行计数,若在一定时间内垃圾桶桶盖还未关闭,则判断为垃圾桶关盖动作出现一次不良。
51.该测试方法可通过调节摆杆的运动范围实现垃圾桶感应的最大感应距离的测试。
52.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1