容器抓取器和容器运输设备的制作方法
[0001]
本发明涉及一种用于抓取和悬置式运输容器的容器抓取器,其包括至少一个夹子,该夹子构造成用于特别是侧向地抓取和保持容器。
背景技术:
[0002]
按本发明的容器抓取器优选使用在饮料灌装设备中、特别优选使用在旋转式设备中。
[0003]
这种运输设备在瓶的所谓的瓶颈操作中特别普遍,其中在瓶颈处抓取瓶。
[0004]
迄今为止已知的夹子由两个抓取爪构成,所述抓取爪具有抓取面,抓取面正好与分别有待处理的容器的形状协调一致,从而在抓取时可以在抓取面和容器之间建立起形状配合。
[0005]
抓取爪主动地、即通过驱动元件和相应的控制机构来操纵,或者被动地通过布置在夹子的运输路径中的例如机械的触发器或激活元件操纵,以便抓取容器。
[0006]
在已知的夹子中存在的问题是,在夹子抓握的区域内,关于容器的形状几乎没有灵活性。已知的夹子大多仅实现了容器直径约0.15mm的变化。
[0007]
因此需要为了运输不同的容器规格而更换夹子。这种更换耗费并且耗时,特别是典型地在一个设备中使用极多的夹子。因此所述运输设备就处理不同的容器规格而言总体上是不灵活的。
技术实现要素:
[0008]
因此本发明所要解决的技术问题是,提供一种容器抓取器,其在被处理的容器规格方面具有更好的灵活性。
[0009]
该技术问题通过权利要求1的主题解决。因此夹子一体式构造并且包括抓取爪,抓取爪构造成使得它们通过施加外力能变形,从而发挥抓取作用。
[0010]
换句话说,抓取爪由于变形而占据抓取位置和保持位置或者处于抓取形状和保持形状。发挥抓取作用可以包括,抓取爪的也称为内臂的至少指向彼此的臂弯曲,使得在抓取爪之间构成了抓取区域。抓取爪、特别是抓取爪的内臂,尤其可以弯曲,使得当在它们之间布置有容器时,至少部分地包围该容器。此外,发挥抓取作用还包括,夹子尤其借助抓取爪施加闭合力,用以抓取容器。
[0011]
导致所述变形的力,下文中也简称为变形力。
[0012]
抓取爪可以由于变形而可靠地包围和抓取不同直径的容器并且因此可以用于处理不同的容器规格。即,在不同容器规格之间切换变得简单。因此提高了在所处理的容器规格方面的灵活性。换句话说,提供了一种有适配性的或灵活的抓取元件。
[0013]
下文中,当说明夹子的形状时,倘若没有另行说明,那么始终指的是如下形状,在该形状下,夹子处在静止状态或没有施加变形力。
[0014]
两个抓取爪可以构造和布置成彼此基本上镜像对称。整个夹子尤其可以构造成基
本上镜像对称。
[0015]
容器可以例如涉及瓶或罐。当涉及瓶时,夹子尤其构造成用于瓶颈操作,即用于至少在瓶颈处抓取和保持瓶。
[0016]
夹子可以例如通过注塑或3d打印工艺、例如flm或fdm制造。夹子可以例如由包括尼龙的材料制成。
[0017]
侧向抓取指的是,夹子的抓取爪在按规定运行中在抓取容器时没有从上方或从下方抓握容器。夹子尤其可以这样构造和布置,使得在按规定运行中,抓取在水平的平面内进行。夹子可以尤其构造成用于周向地抓取容器。这就是说,抓取爪构造和布置成使得它们在按规定运行中抓握容器的周向。
[0018]
特别是由于夹子的和特别是抓取爪的形状和材料弹性,作用到夹子上的外力可以在夹子内分配,使得抓取爪变形,用以抓取容器。换句话说,可以分配力,使得夹子发挥抓取作用。
[0019]
针对外力分配的一个例子就是所谓的鳍条效应(fin ray effect)。夹子因此可以构造成鳍条式夹子。
[0020]
其中每个抓取爪可以具有肋结构,所述肋结构为了在抓取爪内分配外力而构造成使得它们变形,用以抓取容器。
[0021]
其中每个抓取爪可以具有内臂和外臂,所述内臂面朝另一个抓取爪,其中,两个臂在一个部位处直接连接并且额外通过布置在两个臂之间的支柱相互连接。
[0022]
支柱换句话说形成了布置在臂之间的加固部,所述加固部连接两个臂。所述支柱可以是上述肋结构的肋。
[0023]
臂和支柱可以布置在一个平面内。
[0024]
支柱可以分别关于各自的内臂成10度至25度、特别是13度至22度、特别是14度至29度的角地布置。支柱可以关于各自的外臂成90度至140度、特别是100度至130度、特别是110度至120度的角地布置。所述角在此在支柱的如下侧面上加以观察,该侧面面朝内臂和外臂直接相互连接的那个部位。
[0025]
两个臂可以尤其呈v形地相互连接。在这种情况下,内臂的一个端部与外臂的一个端部直接连接。
[0026]
两个臂可以夹成锐角。臂例如可以夹成在40度和85度之间的、特别是在45度和70度之间的角。
[0027]
一个或两个抓取爪、特别是各自的内臂,可以具有抓取面。该抓取面包括抓取爪的一个面,该面在按规定使用中至少部分抓握容器。
[0028]
抓取面可以具有尤其适用于抓取不同的容器直径的曲率。曲率半径尤其可以处在20mm和45mm之间、特别是25mm和40mm之间、特别是30mm和35mm之间。抓取面尤其可以是弯曲的并且内臂的其余的部分不具有曲率。
[0029]
抓取面尤其可以以如下半径弯曲,该半径相当于有待抓取的最大的容器半径。如果抓取具有这个半径的容器,则整个抓取面就可以例如贴靠在容器上。尤其在其它容器半径的情况下,小于整个抓取面的抓取面也可以贴靠在容器上。然而由于变形而存在多个容器半径,在所述多个容器半径中还存在至少四个抓取点,例如在抓取面的外端部处。
[0030]
臂和支柱可以分别例如具有约1mm至3mm、特别是1.5mm至2.5mm、特别是2mm的宽
度。臂和支柱可以具有在4mm和8mm之间、特别是在5mm和7mm之间、特别是6.5mm的高度。每个抓取爪的支柱的数量可以例如处在2和10之间、特别是3和8之间、特别是4和6之间。
[0031]
抓取面可以构造成使得抓取面具有在3mm和8mm之间、特别是在4mm和7mm之间、例如约为4.3mm的高度。抓取面的高度在此尤其可以小于或等于内臂的其余区域的高度。虽然期望可以通过扩大抓取面来提高抓取作用,但令人惊讶的是,特别是根据容器规格,抓取作用在抓取面的高度的特定值之上并没有更好或甚至变差。容器规格此外经常在其外形的柱体区域的尺寸上有所不同。在非柱体区域中,柱体形的抓取面可能很少有支承面以及很少有保持点。针对外形有较小的柱体形区域的容器规格,以抓取面的较小的高度也能确保良好的抓取作用。因此夹子能较为灵活地用于不同的容器规格。通过内臂的其余区域的上述构造方案,可以同时确保夹子是稳定的。这些区域不具有与容器的直接的相互作用并且因此在这方面承受更少的高度限制。
[0032]
容器的外形的优选柱体形的区域(抓取器的抓取面在该区域上作用)是在承载环下方直至瓶肩的区域。当容器的内直径明显变大或变小时,瓶肩则始于瓶口下方。
[0033]
可以按照有待抓取的容器来选择抓取面的尺寸。此外,抓取面可以构造成使得它们形成了抓取爪的增强结构。
[0034]
夹子的其它部分、特别是抓取爪的其它部分,可以具有另一个高度、特别是也更小的高度。
[0035]
抓取面可以相对内臂的与之毗邻的部分至少部分隆起,特别是在其边缘处。抓取面尤其可以相对内臂的与之毗邻的部分隆起了最大1mm至4mm、特别是2mm至3mm。
[0036]
如上文所述那样隆起的和/或弯曲的抓取面可以构造和布置成使得它们限制了抓取爪的变形。换句话说,抓取面可以形成止挡。这使得能限制发生变形的区间。抓取爪的变形可能导致的是,被抓取的容器的中点视抓取爪的变形程度而定布置在不同的位置处。限制变形因此可以提高容器的定位精度。这在容器移交给夹子或被夹子接纳的移交点处特别有利。
[0037]
两个抓取爪可以分别具有自由端部和使两个抓取爪相互连接的端部。
[0038]
使外臂和内臂直接相互连接的连接部位可以是抓取爪的自由端部或者是与两个臂的没有直接连接的端部相比布置得更为靠近抓取爪的自由端部。在内臂和外臂的上述v形的连接中,所述自由端部尤其可以布置在v形的顶点处。
[0039]
抓取爪能以如下方式相互连接,使得两个抓取爪的内臂直接地或者通过也称为内连接件的第一连接件相互连接。
[0040]
第一连接件在此尤其可以仅间接地例如通过各自的内臂和/或支柱与各自的外臂连接。此外,支撑支柱可以将第一连接件与外臂连接起来。
[0041]
抓取爪备选或额外地能以如下方式相互连接,使得两个抓取爪的外臂通过也称为外连接件的第二连接件相互连接。
[0042]
第二连接件在此尤其可以仅间接地例如通过各自的外臂和/或支柱与各自的内臂连接。支撑支柱、例如上述支撑支柱,额外地可以将第二连接件与内臂和/或第一/内连接件连接起来。
[0043]
作为第一连接件的备选或者除了第一连接件外,可以设置杠杆,特别是每个抓取爪各一个杠杆。各自的杠杆可以直接与各自的内臂连接。各自的杠杆备选或附加地可以与
支撑支柱连接,所述支撑支柱将各自的抓取爪的内臂和/或第一连接件与抓取爪的外臂和/或第二连接件连接起来。在设有这些杠杆的情况下,抓取爪可以尤其仅通过第二连接件或外连接件相互连接。
[0044]
本发明也涉及一种容器运输设备,其包括一个或多个上述容器抓取器。所述容器运输设备可以包括至少一个操纵元件,该操纵元件构造成使得该操纵元件在操纵时加载外力到夹子上。
[0045]
操纵元件可以尤其在两个内臂相互直接连接的部位处或者在内连接件处施加外力。当夹子包括上述杠杆时,操纵元件可以在两个杠杆处施加外力,特别是撑开所述杠杆。操纵元件然后可以例如包括凸轮控制机构的凸轮。凸轮控制机构的凸轮然后与夹子的杠杆相互作用,以便操纵这些杠杆。借助凸轮的操纵使得取消了主动的控制并且实现了容器运输设备的高度的灵活性,因为这种凸轮控制机构能使用于不同类型和形状的夹子。
[0046]
容器运输设备可以构造成使得操纵元件为了施加外力而例如借助马达被主动地操纵,其中,主动的操纵尤其借助控制装置加以控制。备选地,容器运输设备可以构造成使得被动地操纵所述操纵元件。外力的施加然后尤其在没有驱动器和没有控制装置的情况下进行。
[0047]
容器运输设备可以例如包括运输星轮,该运输星轮构造成使得夹子围绕其转动轴线绕转并且将容器保持在经过的圆形轨迹的一部分上。容器运输设备可以备选或附加地也包括直线运输设备,其中,夹子在那里至少部分在直线运输轨迹上运动。
[0048]
本发明也涉及一种特别是在使用至少一个容器抓取器、特别是包括至少一个容器抓取器的容器运输设备的情况下用于抓取和悬置式运输容器的方法。所述方法尤其可以在使用上述容器抓取器或上述容器运输设备的情况下执行。所述方法包括施加外力到带有抓取爪的一体式构造的夹子上,使得抓取爪变形,从而抓取爪发挥抓取作用,其中,夹子构造成用于特别是在侧向抓取和保持容器。
[0049]
所述方法尤其可以包括,在将容器移交给容器抓取器的第一移交时间点上应用外力,从而夹子抓取转交给夹子的容器。
[0050]
结合所述设备所说明的特征和优点也能相似地使用于所述方法。
附图说明
[0051]
其它的特征和优点接下来借助示例性的附图阐释。图中:
[0052]
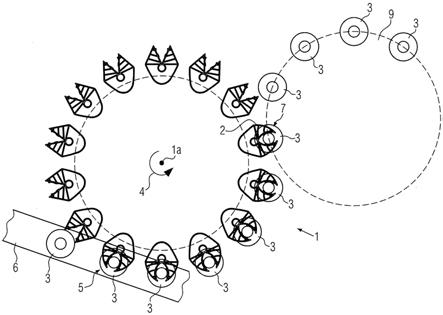
图1是容器运输设备的一个未按比例的示意图;
[0053]
图2a和2b是按照第一个实施方式的容器抓取器的未按比例的示意图;
[0054]
图3a和3b是按照第二个实施方式的容器抓取器的未按比例的示意图;
[0055]
图4是按照第三个实施方式的容器抓取器的未按比例的示意图。
具体实施方式
[0056]
在图1中示出了在此示例性地构造成运输星轮的容器运输设备1的一个例子,该运输星轮例如可以布置在容器处理机的入口或出口中。容器运输设备具有多个容器抓取器2,所述容器抓取器包括各一个夹子并且在此例如周向地围绕运输星轮的转动轴线1a布置。在此也例如示出了容器3,该容器例如可以是瓶。容器在此周向地被夹子抓取和保持。运输星
轮围绕转动轴线例如朝着通过箭头4示出的方向转动。容器可以例如在移交点5处以如下方式被另一个设备6接纳,即,其中一个夹子抓取这个容器。容器然后可以经夹子保持地运输给另一个移交点7并且在那里移交给另一个设备9。
[0057]
不过,容器运输设备当然也可以不同地构造、特别是不必构造成运输星轮。
[0058]
在下文中说明了容器抓取器的两个实施方式,所述容器抓取器尤其可以是上述的或任意其它的容器运输设备的一部分。实施方式的区别基本上在于抓取机构和夹子的形状。
[0059]
在图2a和2b中分别示出了容器抓取器的俯视图。在此,图2a示出了在静止状态中的,即当变形力没有作用到夹子上时的夹子。图2b示出了在抓取状态中的,即当变形力作用到夹子上时的夹子。在这个状态下,夹子发挥抓取作用。
[0060]
夹子2一体式构造并且具有两个带有内臂11和外臂12的抓取爪10。两个抓取爪在此例如镜像对称地构造,但这是可选的。这种对称性大概可以方便预测夹子内的力分配。
[0061]
各自的内臂和外臂直接相互连接并且在连接点处形成了各自的抓取爪的自由端部13。此外,各自的内臂和外臂通过在内臂和外臂之间的且与这些臂布置在一个平面内的支柱14相互连接。在本实施例中,每个抓取爪具有三个支柱。但其它数量同样可以考虑。
[0062]
各自的内臂和外臂在这个实施例中在一个端部处直接相互连接。它们因此呈v形布置。臂例如可以夹成约50度的角。同样可以考虑其它的角,特别是在上述角范围内的角。加固部的支柱与内臂分别夹成了一个锐角。在本实施例中,加固部的支柱例如分别关于各自的内臂成约15度的角地布置并且关于各自的外臂成约90度的角地布置。当然,其它的角、尤其是在上面提到的区间内的角也是可能的。
[0063]
两个抓取爪能以如下方式相互连接,即,两个抓取爪的内臂直接或者如在此所示那样通过也称为内连接件的第一连接件15相互连接。内连接件在此构造成环形。内连接件如由图可知那样仅间接地,即通过内臂、支柱和与外臂的端部连接的两个支撑支柱16,与外臂连接。
[0064]
抓取爪的外臂通过在此成弧形构造的外连接件17相互连接。外连接件还与两个支撑支柱连接并且因此通过支撑支柱与内连接件连接。但不具有与抓取爪的内臂的直接连接。
[0065]
在图中也示出了一个操纵元件,在此以拉拔元件的形式呈现,其不是容器抓取器的一部分,而可以例如是包括这个容器抓取器的容器运输设备的一部分。拉拔元件可以在操纵容器抓取器时尤其在两个内臂相互直接连接的部位处或者在内连接件处施加外力。拉拔元件可以构造成钩形,并且如在此所示那样可以作用到环形的内连接件中并且与之相互作用,以便操纵夹子。为了操纵,拉拔元件可以例如沿着箭头所示的方向运动。所述设备可以这样构造,使得每一个拉拔元件带动其中一个夹子。
[0066]
可以例如这样来选择夹子的材料、特别是材料的弹性以及夹子的尺寸大小,使得通过背离抓取爪地施加拉力到内连接件上使抓取爪变形,用以抓取容器,并且在取消拉力时使抓取爪变形回到打开定位中,从而容器被松开。所述拉拔元件可以用于此目的。
[0067]
夹子可以例如通过注塑或通过3d打印工艺、例如flm或fdm制造。夹子可以例如由尼龙制成。但同样可以考虑其它的材料和制造方式。
[0068]
抓取爪的内臂在这个例子中分别具有抓取面20。抓取面20是抓取爪的在按规定使
用时至少部分地抓握容器的面。夹子的抓取面可以如在此示出的那样相对内臂的其余部分隆起。抓取面可以以如下半径弯曲,该半径相当于有待抓取的最大的容器半径。同样可以考虑的是,不规定特殊的抓取面。
[0069]
上述夹子例如能抓取直径彼此相差了约10mm的、例如在25mm和26mm之间或在28mm和38mm之间的容器。
[0070]
图3a和3b示出了按照第二个实施方式的容器抓取器2
′
。该容器抓取器与在图2a和2b中示出的容器抓取器类似,但例如具有仅两个支柱并且不包括支撑支柱并且不包括内连接件。此外,在此还示出了没有抓取面的实施方案,其中,同样可以考虑设置抓取面。
[0071]
当这样来选择夹子的材料(特别是材料的弹性)以及夹子的尺寸大小,使得通过将容器压入到夹子内和材料的固有应力发挥抓取作用时,可以例如使用这种特别是没有环形的内连接件的设施。于是不需要设置用于拉拔元件的作用点,例如第一种实施方式的环形的内连接件。
[0072]
按本发明的运输设备例如可以如结合图1所说明的运输设备那样地构造并且包括至少一个按本发明的容器抓取器、特别是如在图2a和2b或3a和3b的上下文中所说明那样的容器抓取器。特别是当所述运输设备包括如在图2a和2b中示出那样的容器抓取器时,该运输设备可以例如包括在图2a和2b中表明的操纵元件19。所述操纵元件构造成使得它在被操纵时将外力加载到夹子上。操纵元件可以例如和在图2a和2b中表明的那样在内连接件处施加外力。容器运输设备可以构造成使得操纵所述操纵元件以施加外力。在使用控制装置的情况下能控制操纵元件来施加外力或者操纵元件构造成被动的操纵元件,在被动的操纵元件中无需相应的控制机构就实现施加外力。
[0073]
通过上文所说明的设施可以通过将力作用到环形件上而触发两个抓取爪的变形,使得所述抓取爪围绕容器地闭合并且抓取这个容器。由抓取爪的收拢的臂形成的抓取爪的自由端部朝着彼此弯折。
[0074]
这个设计方案尤其在结合夹子的主动控制机构时是有利的。控制机构然后可以驱控驱动元件,驱动元件分别驱动操纵元件,例如通过拉拔元件施加拉力。
[0075]
但所述设计方案同样可以考虑用于被动的抓取系统,倘若布置在夹子的运输路径中的激活元件通过例如形式为拉拔元件的操纵元件加载相应的力到夹子上、特别是环形件上。例如可以考虑的是,拉拔元件在平行于夹子引导部的曲线引导部中与夹子一起运转,并且这个曲线引导部在夹子应当抓取的区域中与在其它区域中相比具有与夹子引导部的更大的间距,特别是相比这些区域向内偏移,从而拉拔元件虽然继续与夹子一起运转,但同时加载拉力到各自的环形件上。曲线引导部的偏移的区段然后起到激活元件的作用。
[0076]
备选可以如上文已经提到的那样,这样来选择夹子的材料(特别是材料的弹性)和夹子的尺寸大小,使得通过将容器压入到夹子中以及材料的固有应力而发挥抓取作用。这种设计方案尤其在被动的抓取系统中是有利的,此时不设置任何控制机构和驱动元件。
[0077]
图4示出了按照第三种实施方式的夹子2
″
,所述夹子与第一和第二种实施方式的夹子相似地构造。不过在此抓取爪仅通过外(第二)连接件相互连接。所述夹子不包括内(第一)连接件并且内臂也没有直接相互连接。抓取爪的内臂和外臂分别通过支撑支柱直接相互连接。每个支撑支柱与杠杆21连接。在这个例子中,杠杆分别与支撑支柱的端部连接,所述端部与各自的抓取爪的内臂直接连接。也可能的是,夹子不包括支撑支柱。在这种情况
下,杠杆可以直接与抓取爪的各自的内臂连接。
[0078]
也可能的是,不同地构造的夹子例如这些在第一或第二实施方式中说明的夹子具有杠杆,所述杠杆例如可以如在图4中那样构造。
[0079]
为了操纵带有杠杆的夹子、特别是第三种实施方式的夹子,可以设置凸轮22,该凸轮操纵杠杆。用双箭头在图中表征,例如当凸轮经过由曲线引导部设置的轨迹时,凸轮相对于夹子朝着哪个方向运动。
[0080]
当然,通常在前述实施例中提到的特征并不局限于这些特殊的组合并且其它任意组合也是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1