桥式起重机龙门钩智能化可移动式放倒装置及其使用方法与流程
[0001]
本发明涉及桥式起重机,更具体地说,它涉及桥式起重机龙门钩智能化可移动式放倒装置及其使用方法。
背景技术:
[0002]
桥式起重机是安装于车间、仓库和料场的场地上空进行物料吊运的起重设备,它是使用范围最广、数量最多的一种起重机械,桥式起重机的龙门钩在使用一段时间后,必须对龙门钩进行检修。将龙门钩平放至地面上,检修人员对龙门钩的轴承、卡板、滑轮、钢丝绳等零部件进行检查、加油润滑或更换。将龙门钩平放至地面上存在以下问题:平放龙门钩需要检修人员在靠近龙门钩的地面上指挥天车司机配合操作,存在伤人安全风险;龙门钩在地面平放过程中,龙门钩底部先与地面接触,然后天车司机往龙门钩要放倒的一侧开动天车使龙门钩缓慢平放至地面,但由于经常出现天车速度过快或过慢的情况,导致天车、钢丝绳和龙门钩滑轮组不在同一垂直线上,有可能造成龙门钩发生扭转,由于存在安全隐患,检修人员禁止在发生扭转的龙门钩上作业,只能重新再一次放倒龙门钩;在放倒龙门钩时,如果地面不平,也会导致放倒后的龙门钩前后不平衡,需要检修人员利用铁棍进行矫正或者重新升钩再放倒。因此,有必要提出一种龙门钩放倒装置。
技术实现要素:
[0003]
针对现有技术存在的不足,本发明的目的在于提供一种结构简单合理且操作方便的桥式起重机龙门钩智能化可移动式放倒装置及其使用方法,可适用于不同类型的龙门钩摆放装置,解决了桥式起重机龙门钩在地面摆放困难的问题,同时也解决了只能在一个固定地方才可以摆放龙门钩供检修人员作业的难题,降低了作业危险系数以及劳动强度,进一步提高了检修人员的工作效率。
[0004]
本发明的上述技术目的是通过以下技术方案得以实现的:
[0005]
桥式起重机龙门钩智能化可移动式放倒装置,包括底座、辊道和控制装置,所述辊道设置在底座上,辊道由驱动电机驱动,辊道的两端分别设置第一触发板和第二触发板,所述控制装置包括电气控制箱和与电气控制器电连接的第一限位开关及第二限位开关,所述第一限位开关是常开限位开关并与第一触发板连接,所述第二限位开关是常闭限位开关并与第二触发板连接,所述驱动电机与电气控制箱电连接,将底座移动至龙门钩下方,通过天车将龙门钩降下,龙门钩的底部与第一触发板接触并向第一触发板施加压力使得第一限位开关常闭,驱动电机的控制电路得电,驱动电机控制辊道的辊子转动,龙门钩继续下降,龙门钩底部与辊道接触并随着辊子转动而向前运动,直至龙门钩完全放倒,当龙门钩底部向前运动与第二触发板接触并向第二触发板施加压力使得第二限位开关常开,驱动电机的控制电路失电,辊道的辊子停止转动,龙门钩停止向前运动,平放在辊道上。
[0006]
在其中一个实施例中,所述电气控制箱包括总电源开关、控制电源开关、接触器、plc控制开关和plc控制器,所述总电源开关与控制电源开关电连接,所述控制电源开关与
接触器电连接,所述接触器分别与第一限位开关、第二限位开关和plc控制开关电连接,所述plc控制开关、plc控制器与驱动电机依次电连接;
[0007]
闭合总电源开关、控制电源开关和plc控制开关,当第一限位开关处于常开状态时,龙门钩未向第一触发板施加压力,此时驱动电机的控制电路处于未通电状态,且plc控制器也处于未通电的状态,驱动电机未启动;当第一限位开关处于常闭状态时,龙门钩向第一触发板施加压力,此时驱动电机的控制电路形成闭环,接触器得电,plc控制器得电,plc控制器控制驱动电机转动,驱使辊道带动龙门钩放倒,当龙门钩的底部向第二触发板施加压力使得第二限位开关处于常开状态时,驱动电机的控制电路断路,接触器失电,plc控制器失电,驱动电机停止,此时龙门钩完全平放在辊道上。
[0008]
在其中一个实施例中,所述电气控制箱还包括变频器,所述变频器设于plc控制器和驱动电机之间,所述变频器分别与plc控制器和驱动电机电连接,通过变频器控制驱动电机的转速,根据龙门钩下降的速度来调整辊道的辊子的转速。
[0009]
在其中一个实施例中,所述辊道上设有测速传感器,所述测速传感器与plc控制器电连接,通过测速传感器实时检测龙门钩在辊道上的运动速度,将检测信息反馈至plc控制器,plc控制器根据检测信息通过变频器控制驱动电机的转速,从而调整龙门钩在辊道上的运动速度。
[0010]
在其中一个实施例中,所述控制电源开关包括依次电连接的第一电源开关、变压器和第二电源开关,所述第一电源开关与总电源开关电连接,所述第二电源开关与接触器电连接,当总电源电压和驱动电机的额定电压不同时,需要先经过变压器改变电压,与驱动电机匹配。
[0011]
在其中一个实施例中,所述电气控制箱设有启动按钮、工作指示灯、停止按钮和电源指示灯,所述电源指示灯与总电源开关电连接,当合上总电源开关时,电源指示灯亮,所述启动按钮和停止按钮分别与plc控制开关电连接,所述工作指示灯与第二电源开关电连接,显示plc控制开关前端的电路是否通路。
[0012]
在其中一个实施例中,所述辊道两侧分别设有承载龙门钩横梁的支座,两个所述支座位于第一触发板的两侧,当龙门钩完全被放倒在辊道上后,龙门钩的横梁由两个支座支撑。
[0013]
在其中一个实施例中,所述辊道与驱动电机之间设有减速机,所述驱动电机的传动轴与减速机连接,减速机的输出端与辊道连接,由于需要辊道的转速较低且负载较大,增加减速机,有利于速度减慢和提高输出扭矩。
[0014]
在其中一个实施例中,所述底座四角分别设有吊耳,相邻的两个吊耳固定连接有钢丝绳,天车将底座吊运至计划检修的指定区域。
[0015]
桥式起重机龙门钩智能化可移动式放倒装置的使用方法,使用上述的桥式起重机龙门钩智能化可移动式放倒装置,包括以下步骤,
[0016]
天车将相邻吊耳之间的钢丝绳吊起,将底座吊运到检修的指定区域,启动电气控制箱,使辊道处于准备工作的状态;
[0017]
天车控制降下龙门钩,龙门钩的底部与第一触发板接触,龙门钩向第一触发板施加压力,与第一触发板连接的第一限位开关常闭,驱动电机的控制电路形成闭环,电气控制箱控制驱动电机转动,龙门钩继续下降与辊道的辊子接触,龙门钩的底部随着辊子转动向
前运动,龙门钩逐渐倾斜且底部持续与辊道接触,当龙门钩完全在辊道上放倒后,龙门钩继续向前运动直至龙门钩的底部与第二触发板接触,龙门钩的底部向第二触发板施加压力使得第二限位装置常开,驱动电机的控制电路断路,电气控制箱控制驱动电机停止转动,检修人员就可安全方便对龙门钩的零部件进行检查、加油润滑或更换;
[0018]
完成维修后,天车将龙门钩逐渐吊起,由于此时驱动电机的控制电路依然处于断路的状态,因此在吊起龙门钩时,驱动电机处于停止的状态,天车持续将龙门钩吊起直至龙门钩离开辊道。
[0019]
本发明具有以下有益效果:
[0020]
本发明通过辊道带动龙门钩运动来实现龙门钩的放倒操作,具有稳定、安全的优点,本发明在辊道的两端分别设置第一触发板和第二触发板,第一触发板和第二触发板分别与第一限位开关和第二限位开关连接,第一限位开关和第二限位开关均与电气控制箱电连接,电气控制箱与驱动电机电连接,通过与龙门钩接触的第一限位开关的闭合来控制驱动电机转动,辊道带动龙门钩运动从而逐渐平稳放倒龙门钩,在通过与龙门钩接触的第二限位开关的断开来控制驱动电机停止,龙门钩平稳放倒在辊道上,便于检修人员维修龙门钩,本发明安全系数高,实现自动放倒龙门钩,智能化程度高,解决了桥式起重机龙门钩在地面放倒困难的问题,也解决了只能在一个固定地方才可以摆放龙门钩供检修人员作业的问题,降低了作业危险系数以及劳动强度,提高维修效率。
附图说明
[0021]
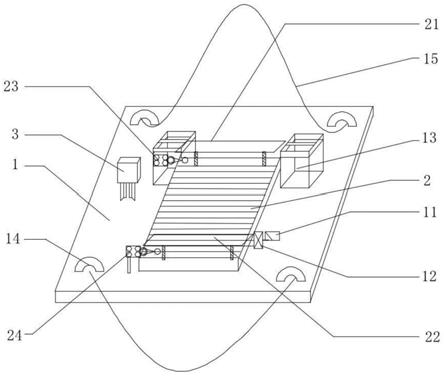
图1是本发明的示意图;
[0022]
图2是龙门钩的正面示意图和对应的侧面示意图;
[0023]
图3是本发明的电气控制箱的内部示意图;
[0024]
图4是本发明的电气控制箱的外表面示意图;
[0025]
图5是本发明的支座的示意图。
[0026]
图中:1-底座,11-驱动电机,12-减速机,13-支座,14-吊耳,15-钢丝绳,2-辊道,21-第一触发板,22-第二触发板,23-第一限位开关,24-第二限位开关,3-电气控制箱,301-第二电源开关,302-plc控制开关,303-变压器,304-plc控制器,305-感应器接头,306-限位开关第一接头,307-限位开关第二接头,308-电机接头,309-变频器,310-接触器,311-总电源开关,312-第一电源开关,313-工作指示灯,314-停止按钮,315-电源指示灯,316-启动按钮,4-板钩,5-横梁。
具体实施方式
[0027]
下面结合附图和实施例,对本发明进行详细描述。
[0028]
值得注意的是,本文所涉及的“上”“下”等方位词均相对于附图视角而定,仅仅只是为了便于描述,不能够理解为对技术方案的限制。
[0029]
如图1-5所示。
[0030]
如图1所示,桥式起重机龙门钩智能化可移动式放倒装置,包括底座1、辊道2和控制装置,辊道2设置在底座1上,辊道2由驱动电机11驱动,辊道2的两端分别设置第一触发板21和第二触发板22,控制装置包括电气控制箱3和与电气控制器电连接的第一限位开关23
及第二限位开关24,第一限位开关23是常开限位开关并与第一触发板21连接,第二限位开关24是常闭限位开关并与第二触发板22连接,驱动电机11与电气控制箱3电连接,将底座1移动至龙门钩下方,通过天车将龙门钩降下,龙门钩的底部与第一触发板21接触并向第一触发板21施加压力使得第一限位开关23常闭,驱动电机11的控制电路得电,驱动电机11控制辊道2的辊子转动,龙门钩继续下降,龙门钩底部与辊道2接触并随着辊子转动而向前运动,直至龙门钩完全放倒,当龙门钩底部向前运动与第二触发板22接触并向第二触发板22施加压力使得第二限位开关24常开,驱动电机11的控制电路失电,辊道2的辊子停止转动,龙门钩停止向前运动,平放在辊道2上,底座1四角分别设有吊耳14,相邻的两个吊耳14固定连接有钢丝绳15,天车将底座1吊运至计划检修的指定区域。
[0031]
优选地,第一触发板21通过弹性机构设置在辊道上,当龙门钩下降向第一触发板施加压力,第一触发板21向下运动使得第一限位开关23闭合,即时后续操作中,龙门钩不与第一触发板21接触,第一限位开关23依然处于常闭状态,当第一触发板21不与龙门钩接触时,第一触发板21在弹性机构的作用下复位,完成检修龙门钩的操作后,将第一限位开关23复位即可。
[0032]
优选地,第二触发板22与辊道2倾斜设置,如,第二触发板22与辊道2的夹角为45
°
,第二触发板22与弹性机构连接,当龙门钩在辊道2的带动下运动至第二触发板22处时,龙门钩的底部向第二触发板22施加压力,第二触发板22转动使得第二限位开关24常开,当龙门钩不与第二触发板22接触时,第二触发板22在弹性机构的作用下复位,龙门钩不与第二触发板22接触,第二限位开关24依然处于常开状态,完成检修龙门钩的操作后,将第二限位开关24复位即可。
[0033]
另外,第二触发板22与辊道2的连接关系不限于上述方式,如,第二触发板22也可以与辊道2垂直设置,第二触发板22也与弹性机构连接,当龙门钩在辊道2的带动下运动至第二触发板22处时,龙门钩的底部向第二触发板22施加压力,第二触发板22向后运动使得第二限位开关24常开,当龙门钩不与第二触发板22接触时,第二触发板22在弹性机构的作用下复位,龙门钩不与第二触发板22接触,第二限位开关24依然处于常开状态,完成检修龙门钩的操作后,将第二限位开关24复位即可。优选地,辊道2与驱动电机11之间设有减速机12,驱动电机11的传动轴与减速机12连接,减速机12的输出端与辊道2连接,由于需要辊道2的转速较低且负载较大,增加减速机12,有利于速度减慢和提高输出扭矩。
[0034]
优选地,如图5所示,辊道2两侧分别设有承载龙门钩横梁的支座13,两个所述支座13位于第一触发板21的两侧,当龙门钩完全被放倒在辊道上后,龙门钩的横梁5由两个支座13支撑。
[0035]
如图2所示,龙门钩包括横梁5和板钩4,板钩4与横梁5可转动地连接。
[0036]
如图3所示,电气控制箱3包括总电源开关311、控制电源开关、接触器310、plc控制开关302和plc控制器304,所述总电源开关311与控制电源开关电连接,所述控制电源开关与接触器310电连接,所述接触器310分别与第一限位开关23、第二限位开关24和plc控制开关302电连接,所述plc控制开关302、plc控制器304与驱动电机11依次电连接;
[0037]
plc控制器304和驱动电机11之间设有变频器309,变频器309分别与plc控制器304和驱动电机11电连接,通过变频器309控制驱动电机11的转速,根据龙门钩下降的速度来调整辊道2的辊子的转速。
[0038]
闭合总电源开关311、控制电源开关和plc控制开关302,当第一限位开关23处于常开状态时,龙门钩未向第一触发板21施加压力,此时驱动电机11的控制电路处于未通电状态,且plc控制器304也处于未通电的状态,驱动电机11未启动;当第一限位开关23处于常闭状态时,龙门钩向第一触发板21施加压力,此时驱动电机11的控制电路形成闭环,接触器310得电,plc控制器304得电,plc控制器304控制驱动电机11转动,驱使辊道2带动龙门钩放倒,当龙门钩的底部向第二触发板22施加压力使得第二限位开关24处于常开状态时,驱动电机11的控制电路断路,接触器310失电,plc控制器304失电,驱动电机11停止,此时龙门钩完全平放在辊道2上。
[0039]
优选地,辊道2上设有测速传感器,所述测速传感器与plc控制器304电连接,通过测速传感器实时检测龙门钩在辊道2上的运动速度,将检测信息反馈至plc控制器304,plc控制器304根据检测信息通过变频器309控制驱动电机11的转速,从而调整龙门钩在辊道2上的运动速度。
[0040]
优选地,控制电源开关包括依次电连接的第一电源开关312、变压器303和第二电源开关301,第一电源开关312与总电源开关311电连接,所述第二电源开关301与接触器310电连接,总电源电压是380v,与驱动电机11的额定电压220v不同,需要先经过380v/220v的变压器303改变电压,与驱动电机11匹配。
[0041]
电气控制箱3设有与驱动电机11电连接的电机接头308、与第一限位开关23电连接的限位开关第一接头306、与第二限位开关24电连接的限位开关第二接头307和与测速传感器电连接的感应器接头305,接触器310通过限位开关第一接头306和限位开关第二接头307分别对应与第一限位开关23和第二限位开关24电连接,plc控制器304通过感应器接头305与测速感应器电连接,变频器309通过电机接头308与驱动电机11电连接。
[0042]
优选地,plc控制器304是西门子s7-300可编辑控制器,测速传感器是trans-tek100系列线性速度传感器,总电源是380v交流电,接触器310是三相交流接触器310。
[0043]
如图4所示,电气控制箱3设有启动按钮316、工作指示灯313、停止按钮314和电源指示灯315,电源指示灯315与总电源开关311电连接,当合上总电源开关311时,电源指示灯315亮,启动按钮316和停止按钮314分别与plc控制开关302电连接,工作指示灯313与第二电源开关301电连接,显示plc控制开关302前端的电路是否通路。
[0044]
优选地,底座1与辊道2之间设有多个千斤顶,多个千斤顶分别设置在辊道2的四角,即使地面有倾斜角度较小的斜坡,也能通过调整辊道2四个角的千斤顶使辊道2处于水平面,防止因辊道2倾斜而导致龙门钩滑动。
[0045]
结合上述实施例,桥式起重机龙门钩智能化可移动式放倒装置的使用方法,包括以下步骤,
[0046]
天车将相邻吊耳14之间的钢丝绳15吊起,将底座1吊运到检修的指定区域,闭合总电源开关311、第一电源开关312、第二电源开关301和plc开关,工作指示灯313和电源指示灯315亮,辊道2处于准备工作的状态;
[0047]
天车控制降下龙门钩,龙门钩先快速下降,直至龙门钩的板钩4的底部即将与第一触发板21接触,在接近辊道2的距离为0.5m时,龙门钩低速下降,使板钩4底部缓慢下降至与第一限位开关23连接的第一触发板21处,龙门钩的板钩4向第一触发板21施加压力使得第一触发板21向下运动,使得与第一触发板21连接的第一限位开关23常闭,接触器310的三相
主触头闭合,驱动电机11的控制电路形成闭环,plc控制器304控制驱动电机11转动,龙门钩在第一触发板21的导向下继续下降使板钩4与辊道2的辊子接触,板钩4的底部随着辊子转动向前运动,龙门钩的板钩4逐渐倾斜且底部持续与辊道2接触,测速传感器持续检测板钩4的运动速度,并将速度信息反馈至plc控制器304处,plc控制器304根据板钩4的速度信息向变频器309发出指令,保持或改变驱动电机11的转速,以此来改变板钩4在辊道2上的运动速度,当龙门钩完全在辊道2上放倒后,龙门钩继续向前运动直至龙门钩的板钩4的底部与第二触发板22接触,板钩4的底部向第二触发板22施加压力使得第二限位装置常开,接触器310的三相主触头断开,驱动电机11的控制电路断路,pcl控制器失电,驱动电机11停止转动,此时,龙门钩的横梁5由两个支座13支撑,检修人员就可安全方便对龙门钩的零部件进行检查、加油润滑或更换;
[0048]
完成维修后,天车将龙门钩逐渐吊起,由于此时接触器310的三相主触头断开,驱动电机11的控制电路依然处于断路的状态,因此在吊起龙门钩时,驱动电机11处于停止的状态,天车持续将龙门钩吊起直至龙门钩离开辊道2。
[0049]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1