移动式垃圾压缩设备装载量显示系统及控制方法与流程
[0001]
本发明涉及环卫垃圾处理设备技术领域,具体为一种移动式垃圾压缩设备装载量显示系统及控制方法。
背景技术:
[0002]
目前,国内市场的垃圾处理设备中,移动式垃圾压缩设备装载量主要采用三种方法来判断:一种是依靠现场操作人员经验判断,此操作方法对操作人员经验技能要求较高(提前估算出满载状态会导致箱内垃圾装载量过少就停止装载,使得原本只需要n箱即可装载完垃圾,实际却需要n+k箱才可装载完垃圾,增加了勾臂车的运输次数和运输成本,加长了工作时间,从而导致整体的运营成本过高;延后估算出满载状态会导致箱内垃圾装载量过大无法将垃圾正常压缩完成,使得上料斗内垃圾不能压缩干净,需要人工清理出无法装载的垃圾,频繁的高强度压缩也会导致压缩箱结构部分产生损坏,导致的设备无法正常使用),且每个操作人员情况不同,经验难以规范,故这种方法造成不同用户的使用状况大不相同;第二种是采用上料装置的上料次数和压缩头压缩垃圾的次数进行判断,因每次上料的垃圾量多少具有不确定性,仅仅依靠次数难以准确判断最终的装载量;第三种是采用压缩头的工作压力来判断,当每次压缩头推出时压力值达到某一预定值时,则判断此时压缩箱内已装满,但液压系统每次工作时,其系统压力会存在有偶然的峰值波动,并且由于“卡垃圾”等现象,经常容易造成假报警等现象出现。从市场实际使用情况分析,采用以上三种方法得出的装载量信息与实际装载量都有较大出入,并都无法判断设备不同运行阶段时的实时装载量,最终造成工作效率低下、运营成本过高、人机功效不好、设备损坏等现象发生。故对于设备能否准确满载报警,对于设备的运营、操作人员的使用、产品的寿命都有极其重要的作用。
技术实现要素:
[0003]
本发明针对现有技术存在的问题,提出了一种移动式垃圾压缩设备装载量显示系统及控制方法,能够准确有效地显示垃圾装载量。
[0004]
本发明解决其技术问题所采用的技术方案是:一种移动式垃圾压缩设备装载量显示系统,包括压缩执行机构,液压控制模块和电气控制模块;所述压缩执行机构包括压缩头,以及与所述压缩头连接的压缩头油缸;所述液压控制模块包括与所述压缩头油缸连接的油路油管,设置在所述油路油管上的液压油泵,以及实时检测液压压力的压力传感器;所述电气控制模块包括与所述液压控制模块连接的中央处理器及与所述中央处理器连接的人机交互界面;所述人机交互界面用于设置参数以及显示垃圾压缩设备的剩余装载量;所述人机交互界面的设置参数包括压缩头缩回到位的压力值p1,压缩头伸出到位的压力值p2,剩余装载量为75%时压缩头退回到位的时间t2、剩余装载量为50%时压缩头退回到位的时间t3、剩余
装载量为25%时压缩头退回到位的时间t4、满箱时压缩头退回到位的时间t5;所述中央处理器包括参数存储单元,用于存储所述人机交互界面的设置参数;计时单元,用于记录所述压缩头在每一次压缩循环中从压缩头缩回到位处推出至压缩头伸出到位处所需的时间t1以及从压缩头伸出到位处缩回至压缩头缩回到位处所需的时间t2;压力数据比对单元,用于在所述压缩头伸出过程中将所述压力传感器检测到的实时压力p与所述压力值p2进行比对以确定所述压缩头的压缩头伸出到位动作是否完成,以及在所述压缩头缩回过程中将所述压力传感器检测到的实时压力p与所述压力值p1进行比对以确定所述压缩头的压缩头缩回到位动作是否完成;第一时间数据比对单元,用于在每次压缩头缩回到位动作完成后将所述计时单元所记录的时间t2与所述时间t2、时间t3、时间t4、时间t5进行比对以确定所述垃圾压缩设备的剩余装载量并确定所述垃圾压缩设备是否满箱。
[0005]
本申请的移动式垃圾压缩设备装载量智能显示系统,能通过压缩设备的压缩头的运动状况和电控程序的信号采集、分析,来对压缩箱内的装载量进行判断和显示,以便用户在使用过程中对垃圾的装载量能实时掌控,降低了对操作人员的经验技能要求,避免了因操作人员判断失误导致箱内垃圾装载量过少就停止工作而导致的运营成本过高,或箱内垃圾装载量过大无法将垃圾正常压缩完成导致的设备无法正常使用或设备损坏。
[0006]
作为优选,所述人机交互界面的设置参数还包括满箱时压缩头伸出到位的时间t1;所述中央处理器还包括第二时间数据比对单元,用于在每次压缩头伸出到位动作完成后将所述计时单元所记录的时间t1与所述时间t1进行比对以确定所述垃圾压缩设备是否满箱。
[0007]
作为优选,所述中央处理器还包括循环次数统计单元,用于统计所述压缩执行机构的执行次数并辅助所述计时单元记录对应循环的时间t1和时间t2。
[0008]
作为优选,所述中央处理器还包括故障检测单元,用于将本次循环的时间t1与上一次循环的时间t1进行比较,若两次循环的时间t1的差值超过设定阈值,则判定压缩头卡死。
[0009]
作为优选,还包括满箱报警装置,与所述中央处理器连接,用于提示工作人员压缩箱已满。
[0010]
一种移动式垃圾压缩设备装载量显示控制方法,包括以下步骤s01通过人机交互界面设置压缩头缩回到位的压力值p1,压缩头伸出到位的压力值p2,剩余装载量为75%时压缩头退回到位的时间t2、剩余装载量为50%时压缩头退回到位的时间t3、剩余装载量为25%时压缩头退回到位的时间t4、满箱时压缩头退回到位的时间t5,满箱时压缩头伸出到位的时间t1;s02中央处理器控制压缩头执行伸出动作直至压力传感器检测到的实时压力p与所述压力值p2相同以完成压缩头伸出到位动作,并记录压缩头从压缩头缩回到位处推出至压缩头伸出到位处所需的时间t1,将时间t1与时间t1进行比对,当时间t1小于等于时间t1时,判定垃圾压缩设备已满箱,否则判定垃圾压缩设备未满箱;
s03中央处理器控制压缩头执行缩回动作直至压力传感器检测到的实时压力p与所述压力值p1相同以完成压缩头缩回到位动作,并记录压缩头从压缩头伸出到位处缩回至压缩头缩回到位处所需的时间t2,将时间t2与时间t2、时间t3、时间t4、时间t5进行比对,当时间t2大于等于时间t5,且所述s02判定垃圾压缩设备已满箱时,则判定垃圾压缩设备真正满箱,进入下一步骤;当时间t2大于等于时间t5,且所述s02判定垃圾压缩设备未满箱时,则判定垃圾压缩设备待定满箱,返回s02;当时间t2小于时间t5时,判定垃圾压缩设备未满箱,在确定垃圾压缩设备的剩余装载量后返回s02,同时垃圾压缩设备的剩余装载量通过人机交互界面进行显示;s04中央处理器控制压缩头停止垃圾压缩动作。
[0011]
本申请方法通过压缩头推出时间、缩回时间及动作压力的逻辑关系来判断压缩箱内的实时装载量,提高了判断的准确性和便捷性,以便用户在使用过程中对垃圾的装载量能实时掌控,降低了对操作人员的经验技能要求,避免了因操作人员判断失误导致箱内垃圾装载量过少就停止工作而导致的运营成本过高,或箱内垃圾装载量过大无法将垃圾正常压缩完成导致的设备无法正常使用或设备损坏,使设备操作人员能自行掌控压缩设备的运行,提高了设备使用的便捷性和人机功效。
[0012]
作为优选,所述s03中,当时间t2大于等于t2且小于t3时,表明垃圾压缩设备的剩余装载量少于75%;当时间t2大于等于t3且小于t4时,表明垃圾压缩设备的剩余装载量少于50%;当时间t2大于等于t4且小于t5时,表明垃圾压缩设备的剩余装载量少于25%;当时间t2大于等于t5时,表明垃圾压缩设备的剩余装载量为0。
[0013]
作为优选,所述s02中,当压力传感器检测到的实时压力p突变为压力值p2,且本次循环的时间t1与上一次循环的时间t1的差值超过设定阈值,则判定压缩头卡死。
[0014]
作为优选,当压缩头卡死时,进入故障清除步骤;所述故障清除动作包括l01压缩头进行缩回动作至压缩头缩回到位处;lo2压缩头进行伸出动作至压缩头伸出到位处;l03压缩头进行缩回动作至压缩头缩回到位处,返回所述s02。
[0015]
作为优选,所述s04还包括通过满箱报警装置提示工作人员垃圾压缩设备已满箱。
[0016]
有益效果本申请系统及方法通过压缩头推出时间、缩回时间及动作压力的逻辑关系来判断压缩箱内的实时装载量,提高了判断的准确性和便捷性,以便用户在使用过程中对垃圾的装载量能实时掌控,降低了对操作人员的经验技能要求,避免了因操作人员判断失误导致箱内垃圾装载量过少就停止工作而导致的运营成本过高,或箱内垃圾装载量过大无法将垃圾正常压缩完成导致的设备无法正常使用或设备损坏,使设备操作人员能自行掌控压缩设备的运行,提高了设备使用的便捷性和人机功效。
附图说明
[0017]
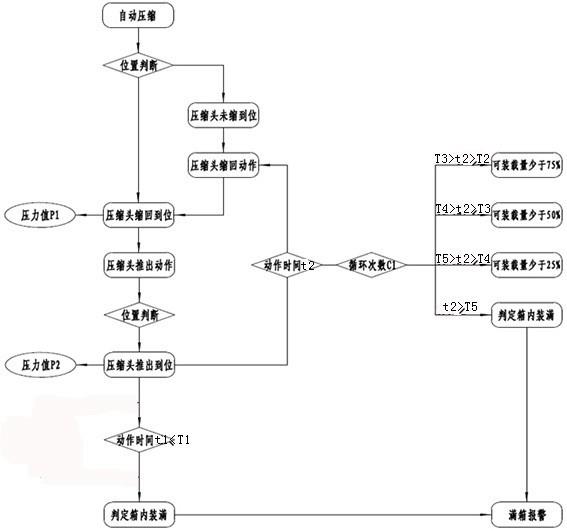
图1为本申请移动式垃圾压缩设备装载量显示系统的流程示意图;图2为本申请移动式垃圾压缩设备的结构示意图;图3为本申请液压控制模块的结构示意图;图4为本申请电气控制模块的结构示意图。
具体实施方式
[0018]
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
[0019]
如图2至图4所示,一种移动式垃圾压缩设备装载量显示系统,包括压缩执行机构,液压控制模块7和电气控制模块8,满箱报警装置。本申请的移动式垃圾压缩设备主要分为机械、电气和液压三大主要模块,其中机械模块提供设备主体框架及各运动部件,电气模块提供设备动作逻辑控制及信息采集显示,液压模块提供设备动力驱动。设备的主要工作方式为垃圾倒入设备的翻斗3,然后翻斗3上升,将翻斗3内的垃圾倾倒入设备的卸料仓1,待垃圾全部倾倒完成后,压缩箱2内的水平压缩头4反复推出和缩回,将压缩箱2内的垃圾压缩至一定密度,从而达到在一定的容积内尽可能的将装载质量增加,将装载量进一步加大,降低垃圾运输成本和运营成本的目的。
[0020]
所述压缩执行机构包括压缩头4,以及与所述压缩头4连接的压缩头油缸5。所述液压控制模块7包括与所述压缩头油缸5连接的油路油管,设置在所述油路油管上的液压油泵,以及实时检测液压压力的压力传感器71。所述电气控制模块8包括与所述液压控制模块7连接的中央处理器81及与所述中央处理器81连接的人机交互界面82。满箱报警装置与所述中央处理器81连接,用于提示工作人员压缩箱2已满。
[0021]
本申请的移动式垃圾压缩设备装载量显示系统主要采用压力传感器71、中央处理器81、人机交互界面82和声光报警装置等硬件对设备的运行进行信息的采集、分析和反馈。当设备进行垃圾的压缩时,压力传感器71用于采集压缩头在挤压垃圾时液压系统的压力变化情况;中央处理器81用于控制压缩头的运动,并将压缩头运动过程中采集到的信息进行综合分析,并通过相应的逻辑运算程序,将需要执行的结果进行反馈;人机交互界面82用于设置设备的各种运行参数及显示设备运行中的各种信息,让操作人员能直观的了解到设备的运行状态;声光报警器用于提醒工作人员压缩箱2已装满,禁止再往卸料仓1倾倒垃圾。
[0022]
所述人机交互界面82用于设置参数以及显示垃圾压缩设备的剩余装载量。所述人机交互界面82的设置参数包括压缩头缩回到位的压力值p1,压缩头伸出到位的压力值p2,剩余装载量为75%时压缩头退回到位的时间t2、剩余装载量为50%时压缩头退回到位的时间t3、剩余装载量为25%时压缩头退回到位的时间t4、满箱时压缩头退回到位的时间t5。
[0023]
所述中央处理器81包括参数存储单元,计时单元,压力数据比对单元,第一时间数据比对单元。移动式垃圾压缩设备每进行一次自动压缩,压力传感器71都会对压缩头动作过程中的驱动压力进行采集并将信息提供给中央处理器81。同时,中央处理器81在控制压缩头运动时,将压缩头每次的动作时间进行记录存储。
[0024]
参数存储单元用于存储所述人机交互界面82的设置参数。
[0025]
计时单元用于记录所述压缩头4在每一次压缩循环中从压缩头缩回到位处推出至压缩头伸出到位处所需的时间t1以及从压缩头伸出到位处缩回至压缩头缩回到位处所需的时间t2。根据液压公式,油缸速度=流量/油缸有效面积,流量=电机功率
×
612/压力,油缸推力=压力
×
油缸有效面积,油缸容积=油缸速度
×
动作时间,油缸容积=油缸行程
×
油缸有效面积,可得随着压缩箱内垃圾量的增多,压缩头每次推出的长度也会逐渐减少,即油缸的伸出逐渐减少,油缸的有效面积固定不变,油缸动作的时间t1则也会逐渐减少;而随垃圾量增多,油缸每次伸出需要的推力f也会增大,压力p也会增大,电机的功率固定不变,液压流量q会随之减小,则油缸速度v也会减小,而根据位移、速度与时间的关系,速度减小,那么所
需要的时间t2将会加长。根据t1与t2的分析,t1会随着压缩箱内垃圾量的增多而减少,t2会随着压缩箱内垃圾量的增多而增多。
[0026]
压力数据比对单元用于在所述压缩头4伸出过程中将所述压力传感器71检测到的实时压力p与所述压力值p2进行比对以确定所述压缩头4的压缩头伸出到位动作是否完成,以及在所述压缩头4缩回过程中将所述压力传感器71检测到的实时压力p与所述压力值p1进行比对以确定所述压缩头4的压缩头缩回到位动作是否完成。通过中央处理器81可以对压缩头缩回到位的位置、压缩头推出到位位置及压缩头动作时间进行判断:当压缩头缩回动作时,取得到一个压力p,处理器将此时的压力p与“压缩头缩回到位”的压力值p1不断进行比较,当p与p1的差值在设定的阈值范围时,则判定此时压缩头已经缩回到位;当压缩头推出动作时,取得到一个压力p,处理器将此时的压力p与“压缩头推出到位”的压力值p2不断进行比较,当p与p2的差值在设定的阈值范围时,则判定此时压缩头已经推出到位。
[0027]
第一时间数据比对单元用于在每次压缩头缩回到位动作完成后将所述计时单元所记录的时间t2与所述时间t2、时间t3、时间t4、时间t5进行比对以确定所述垃圾压缩设备的剩余装载量并确定所述垃圾压缩设备是否满箱。通过大量试验或实际数据分别对压缩箱内垃圾装载量处于25%以上,50%以上,75%以上,箱内已装满四种状态时的动作时间进行确定(可根据使用者的要求增加和减少可显示的装载量百分比)。移动式垃圾压缩设备在压缩垃圾时,整个压缩机构是隐藏在设备内部,操作人员无法观察到压缩箱内垃圾的装载量,故通过此套逻辑运算,可将设备的实时装载量直观的反馈给操作人员,以便操作人员能主动性的根据实际情况来决定设备的装载量、运行方式等,也加强了与辅助设备的沟通性,如根据配套勾臂车的运输时间,在垃圾装载量达到某一值时,可提前与勾臂车联系,避免了勾臂车提前到达时勾臂车需要等待压缩设备工作完成或勾臂车延后到达时压缩设备需要等待勾臂到达,提高了工作效率和设备的人机功效。
[0028]
通过中央处理器81可以将采集的参数进行逻辑运算。采集压缩头“缩回到位”过程中所用的时间t2,并在设备运行过程中不断将t2与t2、t3、t4、t5进行比较分析,当t3>t2≧t2时,则可判定装载量处于25%以上且处于50%以下,即可用装载量少于75%;当t4> t2≧t3,则可判定装载量处于50%以上且处于75%以下,即可用装载量少于50%;当t5> t2≧t4,则可判定装载量处于75%以上且处于100%以下,即可用装载量少于25%;当t2≧t5,则可判定此时压缩箱内垃圾已装满。中央处理器通过以太网通讯,将运算结果传送给人机文本显示器,以便操作人员能直观便捷的了解到设备的运行状态。同时,因不同地区设备的外部影响因素都不一样,比如南北方温度对液压速度的影响等,相关的设定参数也会随之改变,故为了方便对设备进行调试,也可在人机交互界面82相关参数进行设定,调试人员不需改动程序即可完成调试。
[0029]
所述人机交互界面82的设置参数还包括满箱时压缩头伸出到位的时间t1,所述中央处理器81还包括用于在每次压缩头伸出到位动作完成后将所述计时单元所记录的时间t1与所述时间t1进行比对以确定所述垃圾压缩设备是否满箱的第二时间数据比对单元。本申请通过双重判断机制,有效保障了满箱报警的准确性。当系统运算出满箱信息后,中央处理器会通过以太网通讯,将报警信息传送给人机文本显示器和声光一体报警装置,此时会在显示屏上会进行文字提示,同时声光报警器会产生高音贝的语音提示和转亮式的灯光提示,以便操作人员快速掌握报警信息。
[0030]
所述中央处理器81还包括用于统计所述压缩执行机构的执行次数并辅助所述计时单元记录对应循环的时间t1和时间t2的循环次数统计单元。
[0031]
所述中央处理器81还包括故障检测单元,故障检测单元用于将本次循环的时间t1与上一次循环的时间t1进行比较,若两次循环的时间t1的差值超过设定阈值,则判定压缩头4卡死。在移动式垃圾压缩设备的实际使用过程中,因工作性质的特殊性(垃圾),其压缩介质复杂,压缩头在往返压缩垃圾过程中,经常会出现在某位置时垃圾将压缩头卡住,导致系统误认为垃圾装载量已达到此位置,从而使电气系统采集信息不准确。为了减少此现象的发生,本申请增加了故障检测单元,当系统监测到压缩头卡住(压力突然增大),此时系统会将此时压缩头动作的时间与上次动作的时间进行比较,当两次的时间差距较大时,系统会判定此时压缩头被卡住,而非是垃圾达到预定值压缩密度,此时中央处理器自动执行压缩头缩回,并进行故障清除动作将堵塞处的垃圾清理顺畅。
[0032]
本申请公开了移动式垃圾压缩设备运行过程中垃圾压缩箱内垃圾装载量智能显示系统,通过此套系统,能通过压缩设备的压缩头的运动状况和电控程序的信号采集、分析,来对压缩箱内的装载量进行判断和显示,以便用户在使用过程中对垃圾的装载量能实时掌控,降低了对操作人员的经验技能要求,避免了因操作人员判断失误导致箱内垃圾装载量过少就停止工作而导致的运营成本过高,或箱内垃圾装载量过大无法将垃圾正常压缩完成导致的设备无法正常使用或设备损坏。本发明通过压缩头推出时间、缩回时间及动作压力的逻辑关系来判断压缩箱内的实时装载量,使设备操作人员能自行掌控压缩设备的装载量,提高了设备使用的便捷性和人机功效。
[0033]
如图1所示,一种移动式垃圾压缩设备装载量显示控制方法,包括以下步骤s01通过人机交互界面82设置压缩头缩回到位的压力值p1,压缩头伸出到位的压力值p2,剩余装载量为75%时压缩头退回到位的时间t2、剩余装载量为50%时压缩头退回到位的时间t3、剩余装载量为25%时压缩头退回到位的时间t4、满箱时压缩头退回到位的时间t5,满箱时压缩头伸出到位的时间t1。
[0034]
s02中央处理器81控制压缩头4执行伸出动作直至压力传感器71检测到的实时压力p与所述压力值p2相同以完成压缩头伸出到位动作,并记录压缩头4从压缩头缩回到位处推出至压缩头伸出到位处所需的时间t1,将时间t1与时间t1进行比对,当时间t1小于等于时间t1时,判定垃圾压缩设备已满箱,否则判定垃圾压缩设备未满箱。
[0035]
所述s02中,当压力传感器71检测到的实时压力p突变为压力值p2,且本次循环的时间t1与上一次循环的时间t1的差值超过设定阈值,则判定压缩头4卡死。当压缩头4卡死时,进入故障清除步骤;所述故障清除动作包括l01压缩头4进行缩回动作至压缩头缩回到位处;lo2压缩头4进行伸出动作至压缩头伸出到位处;l03压缩头4进行缩回动作至压缩头缩回到位处,返回所述s02。
[0036]
s03中央处理器81控制压缩头4执行缩回动作直至压力传感器71检测到的实时压力p与所述压力值p1相同以完成压缩头缩回到位动作,并记录压缩头4从压缩头伸出到位处缩回至压缩头缩回到位处所需的时间t2,将时间t2与时间t2、时间t3、时间t4、时间t5进行比对,当时间t2大于等于时间t5,且所述s02判定垃圾压缩设备已满箱时,则判定垃圾压缩设备真正满箱,进入下一步骤;当时间t2大于等于时间t5,且所述s02判定垃圾压缩设备未满箱时,则判定垃圾压缩设备待定满箱,返回s02;当时间t2小于时间t5时,判定垃圾压缩设
备未满箱,在确定垃圾压缩设备的剩余装载量后返回s02,同时垃圾压缩设备的剩余装载量通过人机交互界面82进行显示。所述s03中,当时间t2大于等于t2且小于t3时,表明垃圾压缩设备的剩余装载量少于75%;当时间t2大于等于t3且小于t4时,表明垃圾压缩设备的剩余装载量少于50%;当时间t2大于等于t4且小于t5时,表明垃圾压缩设备的剩余装载量少于25%;当时间t2大于等于t5时,表明垃圾压缩设备的剩余装载量为0。
[0037]
s04中央处理器81控制压缩头4停止垃圾压缩动作。所述s04还包括通过满箱报警装置提示工作人员垃圾压缩设备已满箱。
[0038]
当移动式垃圾压缩设备开始压缩工作时,各信号采集装置将采集到的信息反馈给中央处理器81,中央处理器81通过逻辑运算综合分析各信息后,发出指令控制压缩头的自动动作,并能排除压缩箱“卡垃圾”等现象的发生。在压缩头4压缩垃圾的过程中,根据压缩头4动作的时间t2及工作压力进行逻辑比较运算,得出实时的垃圾装载量和满箱等设备运行信息,并将信息通过以太网通信的方式传输给人机文本显示器和声光一体报警装置。本申请方法采用了压缩头实时压力监控、动作时间记录、防“卡垃圾”程序等的综合性逻辑运算,不受上料装置中垃圾量多少影响,只跟实际压缩量有关系,所以按照此方法得出的垃圾转载量信息是准确的。本发明通过压缩头推出时间、缩回时间及动作压力的逻辑关系来判断压缩箱内的实时装载量,提高了判断的准确性和便捷性,以便用户在使用过程中对垃圾的装载量能实时掌控,降低了对操作人员的经验技能要求,避免了因操作人员判断失误导致箱内垃圾装载量过少就停止工作而导致的运营成本过高,或箱内垃圾装载量过大无法将垃圾正常压缩完成导致的设备无法正常使用或设备损坏。使设备操作人员能自行掌控压缩设备的运行,提高了设备使用的便捷性和人机功效。
[0039]
上面所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1