一种自动调节设定张力的伺服张力器的制作方法
[0001]
本实用新型具体涉及一种自动调节设定张力的伺服张力器。
背景技术:
[0002]
伺服张力器的工作原理是在电动马达将漆包线通过马达上的导轮导出的一种绕线方式,马达的工作方式是在角度传感器的控制下随角度变化而跟随出线速度的变化,形成了一个可将张力值恒定的预出线系统。因此伺服张力器由于采用了伺服闭环控制的原理而实现了预出线的功能。
[0003]
这个预出线功能即是主动送线的动作,漆包线经张力器输向绕线机由绕线机来完成线圈的卷线过程,在卷线过程中由于线圈的工艺要求其卷线速度从起始至结束必然存在高低速的变化,速度变化越大线张力的变化就越大。预出线的伺服张力器正是需要解决这一现象,伺服张力器预出线系统可以跟随绕线机的卷线要求来进行预出线,这在对线张力的恒定要求起到了决定性的保证作用。
[0004]
传统的伺服张力器的主要结构包括了马达、马达导轮、张力杆、弹簧、张力调节、过线轮等组成。其中张力调节部分是用来设定张力值的重要结构,该结构主要由摆臂杆、弹簧和张力杆组成,通过调节旋转摆臂杆的角度使弹簧伸长或缩短来达到调节设定的要求张力值。
[0005]
现今存在的伺服张力器张力调节结构都是以手动调节方式设计。这种设计只能通过手动来调节设定所需的张力值,无法实现自动化控制的生产需要。
技术实现要素:
[0006]
针对上述情况,为克服现有技术的缺陷,本实用新型提供一种自动调节设定张力的伺服张力器。
[0007]
为了实现上述目的,本实用新型提供以下技术方案:
[0008]
一种自动调节设定张力的伺服张力器,包括张力设定调节结构、显示屏结构、预出线结构,预出线结构包括第一伺服电机、大导轮,第一伺服电机与大导轮连接并能够驱动大导轮的转动从而进行预出线操作;
[0009]
显示屏结构包括显示板和伺服驱动控制器,显示板外露,伺服驱动控制器与第一伺服电机连接,并能够通过第一伺服电机驱动大导轮;显示板与伺服驱动控制器连接。
[0010]
张力设定调节结构包括第二伺服电机、蜗杆、蜗轮、蜗轮轴、摆臂杆、磁铁、霍尔板、张力杆组件、拉簧,张力杆组件包括张力杆、张力杆转接轴,张力杆与张力杆转接轴连接,第二伺服电机还与伺服驱动控制器连接,并能够被伺服驱动控制器所驱动,蜗杆与第二伺服电机连接,蜗轮连接在蜗轮轴上,磁铁安装在摆臂杆上,蜗轮轴与蜗轮转接轴连接,摆臂杆与蜗轮转接轴连接,摆臂杆还与拉簧一端连接,拉簧另一端与张力杆连接。
[0011]
进一步地,该伺服张力器还包括过线路径结构,过线路径结构包括瓷过线器、羊毛毡组件、第一防跳线器、第二防跳线器、第三防跳线器、过线轮,瓷过线器、羊毛毡组件、第一
防跳线器、第二防跳线器、第三防跳线器均安装在机壳上。
[0012]
进一步地,张力设定调节结构还包括电机支架,第二伺服电机连接在电机支架上。
[0013]
进一步地,张力设定调节结构还包括电机轴支架,电机轴支架固定连接在电机支架上。
[0014]
进一步地,蜗杆与电机轴支架连接。
[0015]
进一步地,张力设定调节结构还包括蜗轮轴座,蜗轮轴座与蜗轮轴连接。
[0016]
进一步地,第一伺服电机与大导轮通过紧固螺钉连接。
[0017]
进一步地,该伺服张力器还包括机壳与机壳盖板,机壳与机壳盖板卡扣式连接。
[0018]
进一步地,该伺服张力器还包括电源开关,电源开关安装在机壳上。
[0019]
进一步地,该伺服张力器还包括按钮开关、手轮,按钮开关安装在机壳左侧面,手轮安装在机壳右侧面。
[0020]
本实用新型的有益效果是:
[0021]
本实用新型能够实现对张力的自动调节功能,生产过程中同一线圈中需要使用不同张力值时,采用此伺服张力器能够对不同张力大小进行调节,能够在不同张力值下切换使用。
附图说明
[0022]
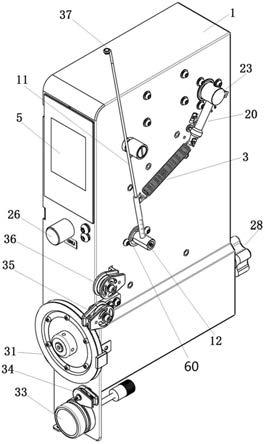
图1是本实用新型伺服张力器的结构示意图(显示出了彩色显示屏、羊毛毡组件、按钮)。
[0023]
图2是本实用新型伺服张力器的结构示意图(显示出了数据信号接口、电源开关)。
[0024]
图3是本实用新型伺服张力器的剖视图(显示出了机壳的内部结构)。
[0025]
图4是预出线结构的示意图,其中图4(a)为图4(b)的右视图。
[0026]
图5是张力设定调节结构的结构示意图。
[0027]
图6是图5的主视图。
[0028]
图7是图5的右视图。
[0029]
图8是过线路径结构示意图。
[0030]
图9是测量结构的示意图,其中,图9(a)是图9(b)的仰视图,图9(c)是图9(b)的左视图。
[0031]
图10是彩色显示屏结构的示意图,其中,图10(a)是彩色显示屏结构的主视图,图10(b)是图10(a)沿a-a方向的纵向剖视图。
[0032]
图11是数据信号控制接口组件的示意图,其中,图11(b)是数据信号控制接口组件的主视图,图11(a)是图11(b)的右视图。
具体实施方式
[0033]
以下结合附图对本实用新型的技术方案做进一步详细说明,应当指出的是,具体实施方式只是对本实用新型的详细说明,不应视为对本实用新型的限定。
[0034]
实施例1
[0035]
如图1-11所示,一种自动调节设定张力的伺服张力器,包括张力设定调节结构45、显示屏结构44、预出线结构42。在一些优选的方式中,该张力器还包括机壳1、机壳盖板2,机
壳1与机壳盖板2连接;在一些优选的方式中,机壳1与机壳盖板2可拆式连接,机壳盖板2能够盖合机壳1,在一些优选的方式中,机壳1与机壳盖板2卡扣式连接,这样便于安装或者拆卸。
[0036]
在一些优选的方式中,该张力器还包括电源开关25;电源开关25安装在机壳上。
[0037]
在一些优选的方式中,如图3-4所示,预出线结构42包括第一伺服电机30、大导轮31,第一伺服电机30安装在机壳1内,大导轮31安装在机壳1外,第一伺服电机30与大导轮31连接并能够驱动大导轮31的转动从而进行预出线操作;在一些优选的方式中,第一伺服电机30与大导轮31通过紧固螺钉50连接。
[0038]
在一些优选的方式中,该张力器还包括过线路径结构,图8显示出了过线路径;如图8所示,过线路径结构包括瓷过线器32、羊毛毡组件33、第一防跳线器34、第二防跳线器35、第三防跳线器36、过线轮37;瓷过线器32、羊毛毡组件33、第一防跳线器34、第二防跳线器35、第三防跳线器36均安装在机壳1上,均位于机壳1外表面,其中,瓷过线器32、羊毛毡组件33、第一防跳线器34安装在机壳1的左侧面。
[0039]
在一些优选的方式中,显示屏结构包括显示板和伺服驱动控制器4,显示板安装在机壳上,显示板外露,显示板能够显示张力大小,还能够在显示板上设置张力值。在一些优选的方式中,伺服驱动控制器4安装在机壳1上,位于机壳内部,伺服驱动控制器4分别与第一伺服电机、第二伺服电机、显示板相连,伺服驱动控制器能够根据设置的张力值,控制第一伺服电机、第二伺服电机的运动,进而调节张力。伺服驱动控制器4不仅能够控制张力的大小还能控制张力的稳定性,在一些优选的方式中,伺服驱动控制器4能够控制第一伺服电机30的转速,还能够控制第二伺服电机13的转动角度。本实用新型采用现有的常规的显示板,常规的伺服驱动控制器即可,本实用新型不对显示板本身的结构、工作原理及连接方式进行改进,同样地,本实用新型不对伺服驱动控制器本身的结构、工作原理及连接方式进行改进。
[0040]
在一些优选的方式中,如图5-7所示,张力设定调节结构45包括第二伺服电机13、电机支架14、电机轴支架15、蜗杆16、蜗轮17、蜗轮轴18、蜗轮轴座19、摆臂杆20、磁铁21、霍尔板22、张力杆组件、拉簧,在一些优选的方式中,如图1-2所示,张力杆组件包括张力杆11、张力杆转接轴12,张力杆11与张力杆转接轴12连接,张力杆11还与过线轮37连接;在一些优选的方式中,如图5-7所示,第二伺服电机13连接在电机支架14上,在一些优选的方式中,第二伺服电机13通过螺丝或者螺栓连接在电机支架14上,电机轴支架15固定连接在电机支架14上,蜗杆16与电机轴支架15连接,蜗杆16与第二伺服电机13连接,蜗轮轴座19与蜗轮轴18连接,蜗轮17连接在蜗轮轴18上,磁铁21安装在摆臂杆20的远离蜗轮轴座19的那一端,霍尔板22连接在机壳上,摆臂杆20摆动时磁铁21与霍尔板22上的感应片感应,从而控制摆臂杆的位置;蜗轮轴18与蜗轮转接轴23连接,摆臂杆20与蜗轮转接轴23连接,摆臂杆20还与拉簧3一端连接,拉簧3另一端与张力杆11连接。在一些优选的方式中,本实用新型的张力器能够通过摆臂杆上的磁铁与霍尔板上的元器件感应,来进行每次开机的复位以确保摆臂杆的位置精度。
[0041]
在一些优选的方式中,如图5-6所示,蜗杆16上设有螺旋齿24,蜗轮17上设有与之匹配的齿,蜗杆16与蜗轮17相互啮合,蜗杆16转动,能够带动蜗轮17转动。
[0042]
在一些优选的方式中,伺服驱动控制器控制第二伺服电机13运动,第二伺服电机
13能够带动蜗杆16转动,蜗杆16转动能够带动蜗轮17转动,蜗轮17转动,能够带动摆臂杆20转动,摆臂杆20将力作用于拉簧3,拉簧3将力作用于张力杆11,从而调节过线轮37上的线的张力,改变张力的大小。
[0043]
在一些优选的方式中,第二伺服电机13采用直流无刷伺服电机作为可自动控制的执行部件。直流无刷伺服电机的转动惯量小、启动电压低、空载电流小,电机转速高达8000rpm;体积小、动作快反应快、过载能力大、调速范围宽,低速力矩大,波动小,运行平稳,变压范围大,频率可调,发热和噪音较低。
[0044]
在一些优选的方式中,如图1所示,该伺服张力器还包括按钮开关26,按钮开关26安装在机壳1左侧面。按钮开关主要是对显示屏的显示内容进行设置,比如中英文语言设置、张力大小设置、张力段数设置、张力值上下限设置、报警角度及工作角度设置、联机脱机设置、屏幕亮度设置、密码设置等。
[0045]
在一些优选的方式中,如图2所示,该伺服张力器还包括电源及报警接口27,通过该接口可以与电源连接,或者通过此接口与报警装置连接。
[0046]
在一些优选的方式中,如图2所示,该伺服张力器还包括手轮28,手轮28安装在机壳1右侧面。在一些优选的方式中,手轮28为五星手轮。手轮28用于固定张力器。如图3所示,手轮与安装座61相连,手轮能够把张力器固定在绕线机上。
[0047]
实施例2
[0048]
在本实施例中,如图10所示,显示屏结构44包括显示屏5、线路板6、安装板7,在一些优选的方式中,显示屏采用彩色显示屏5,彩色显示屏5分别与线路板6、安装板7连接,安装板7安装在机壳1上;在一些优选的方式中,线路板6、彩色显示屏5均安装在安装板7上,彩色显示屏5与线路板6连接,彩色显示屏5能够显示实时张力数据及相关内容,能够对张力大小进行实时监控,显示屏还能够用于用户设置等操控操作。比如,中英文语言设置、张力大小设置、张力段数设置、张力值上下限设置、报警角度及工作角度设置、联机脱机设置、屏幕亮度设置、密码设置。通过按钮开关能够进行以上所述的设置。
[0049]
在一些优选的方式中,该张力器还包括测量结构41,如图9所示,测量结构41包括测量传感器38,测量传感器38用于测量张力大小,测量传感器38固定安装在机壳1上,测量传感器38与第三防跳线器36连接,在一些优选的方式中,如图9所示,测量传感器38通过防跳线器固定片51与第三防跳线器36连接,测量传感器38通过连接线与线路板6连接,测量传感器能够将张力大小数据通过连接线传输至线路板,最终由彩色显示屏,显示出来。本实用新型采用现有的测量传感器即可,本实用新型不对测量传感器本身的结构、测量原理、连接方式及数据传输方式进行改进。
[0050]
在一些优选的方式中,该张力器还包括角度传感器40,如图3所示,角度传感器40安装在机壳1上,位于机壳内部,角度传感器通过张力杆轴座60与张力杆连接,角度传感器还能够通过数据线连接到线路板。角度传感器主要是对张力杆摆动角度进行测量,从而控制漆包线的出线角度。本实用新型采用现有的角度传感器即可,不对角度传感器本身的结构、测量原理、连接方式及数据传输方式进行改进。在另一些优选的方式中,角度传感器能够通过连接线连接到伺服驱动控制器。
[0051]
在一些优选的方式中,伺服驱动控制器4安装在机壳1上,位于机壳内部,伺服驱动控制器4分别与传感器(包括角度传感器、测量传感器等)、第一伺服电机、第二伺服电机、线
路板,电源板,显示屏相连,伺服驱动控制器4能够控制张力的大小及稳定性,在一些优选的方式中,伺服驱动控制器4能够控制第一伺服电机30的转速,还能够控制第二伺服电机13的转动角度。
[0052]
在一些优选的方式中,该张力器还包括数据信号控制接口组件43,如图11所示,数据信号控制接口组件43包括数据信号接口8、电源板9、接线端子10,接线端子10与电源板9连接,电源板9安装在机壳1上,位于机壳内部;在一些优选的方式中,数据信号接口与线路板连接,数据信号接口还能够通过连接线与绕线机连接,能够相互通讯。本实用新型中所采用的通讯方式为现有技术中常规的普通的通讯方式,本实用新型不对此进行改进,本实用新型只是对伺服张力器的结构进行改进。
[0053]
本实施例中的其他实施方式可以与实施例1相同。
[0054]
显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1