用于有缆管道机器人的自动收放装置的制作方法
[0001]
本实用新型涉及管道施工领域,特指一种用于有缆管道机器人的自动收放装置。
背景技术:
[0002]
有缆机器人被广泛应用于管道内部检修等领域,即将机器人与光缆连接,进而将机器人放入管道中,机器人记录的管道内部信息可通过光缆向外传输,通过收回光缆也可将机器人从管道中拖出。
[0003]
现有的缆线收放方式大多是采用将线缆收卷与绞盘上,通过机器人运动拖动线缆并带动绞盘转动,使得线缆放出,收回线缆时通过人工转动绞盘以将线缆收卷,在实际使用过程中,当机器人在管道中后退时,线缆不会自动收回,已放出的线缆可能会卡住机器人,当机器人再次前进时,也容易出现线缆相互缠绕或缠住机器人的问题,不利于机器人的正常工作。
技术实现要素:
[0004]
本实用新型的目的在于克服现有技术的缺陷,提供一种用于有缆管道机器人的自动收放装置,解决了线缆收放困难的问题,能够自动放出或收回线缆,且线缆的放线速度能够与机器人的行走速度相适配,以减少线缆卡阻或缠绕的情况,延长线缆的使用寿命,保证了机器人的信号传输。
[0005]
实现上述目的的技术方案是:
[0006]
本实用新型提供了一种用于有缆管道机器人的自动收放装置,用于自动收放连接于机器人的线缆,包括:
[0007]
支架,该支架固定安装有驱动电机;
[0008]
转动连接于支架且供绕设线缆的轮盘,该轮盘与驱动电机驱动连接,通过驱动电机带动轮盘转动,以收放线缆,线缆自轮盘放出的端部与机器人固定连接;以及
[0009]
安装于支架且靠近自轮盘放出的线缆设置的感应件,该感应件与驱动电机控制连接,且自轮盘放出的线缆贴合于感应件的表面,通过感应件感应到线缆张紧,以控制驱动电机调整轮盘的转速。
[0010]
本实用新型采用用于有缆管道机器人的自动收放装置,通过驱动电机驱动轮盘转动以收放线缆,放出线缆使得连接管中的机器人能够进入待检测的管道中,收回线缆使得待检测管道中的机器人返回,在收放线缆的过程中,若线缆张紧,则线缆顶抵感应件,使得感应件感应到线缆张紧,从而控制驱动电机调整轮盘的转速,以避免线缆被拉断,解决了线缆收放困难的问题,能够自动放出或收回线缆,且线缆的放线速度能够与机器人的行走速度相适配,以减少线缆卡阻或缠绕的情况,延长线缆的使用寿命,保证了机器人的信号传输。
[0011]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,该感应件包括安装于支架且可伸缩调节的伸缩杆、安装于伸缩杆且与自轮盘放出的线缆相贴合的感应
轮以及对应感应轮且安装于支架的位移传感器;
[0012]
通过线缆张紧以顶抵感应轮,使得伸缩杆收缩,进而位移传感器感应到感应轮的位置发生变化,从而控制驱动电机调整轮盘的转速。
[0013]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,该线缆收卷于线缆盘,该线缆的一端自所述线缆盘放出且自支架远离感应件的一侧穿入并绕过轮盘与机器人固定连接;
[0014]
该自动收放装置还包括转动安装于支架靠近线缆穿入处的张紧检测件,该张紧检测件对应抵压线缆于轮盘,该张紧检测件与驱动电机控制连接;
[0015]
通过线缆张紧并顶起张紧检测件,使得张紧检测件转动并检测到线缆张紧,从而控制驱动电机加快轮盘的转动速度。
[0016]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,该张紧检测件包括供抵压住线缆的张紧轮、一端固定于张紧轮且另一端转动连接于支架的连接臂以及垂直连接于连接臂靠近支架的一端的磁条;
[0017]
该支架与连接臂之间连接有弹簧以使得张紧轮抵压住线缆,该支架靠近磁条的位置安装有磁感应器,该磁感应器与驱动电机控制连接;
[0018]
通过线缆张紧并顶起张紧轮,使得连接臂转动,并带动磁条转动,进而磁感应器感应到磁条的位置发生变化,从而控制驱动电机加快轮盘的转动速度。
[0019]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,还包括固定于所述支架且供与待检测的管道相连通的连接管,该机器人和感应件均位于连接管中,自轮盘放出的线缆穿设于连接管。
[0020]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,还包括固定于连接管中且相对设置的两根导向光轴以及滑设于导向光轴且供推抵机器人沿连接管移动的下压件,该下压件的截面呈l形,且下压件开设有供线缆通过的条形孔;
[0021]
通过固定连接该连接管与待检测的管道,进而沿导向光轴移动下压件,使得下压件推顶机器人至待检测的管道中。
[0022]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,该驱动电机形成有向外凸伸的驱动轴;
[0023]
该自动收放装置还包括转动连接于支架且与轮盘的中心固定连接的旋转轴以及中心固定连接于旋转轴的第一同步轮,该第一同步轮通过第一传动带与驱动轴驱动连接,通过驱动电机驱动该驱动轴转动,使得第一传动带带动第一同步轮转动,从而第一同步轮通过旋转轴带动轮盘转动。
[0024]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,还包括靠近自轮盘放出的线缆设置且位于感应件上方的第二同步轮以及与第二同步轮相对设置的导向轮,该第二同步轮通过第二传动带与驱动轴驱动连接,该线缆夹设于第二同步轮与导向轮之间。
[0025]
本实用新型用于有缆管道机器人的自动收放装置的进一步改进在于,还包括位置可调地安装于支架且对应沿轮盘的周沿间隔设置的若干压紧轮,通过调节压紧轮的位置,使得压紧轮对应抵住绕设于轮盘上的线缆。
附图说明
[0026]
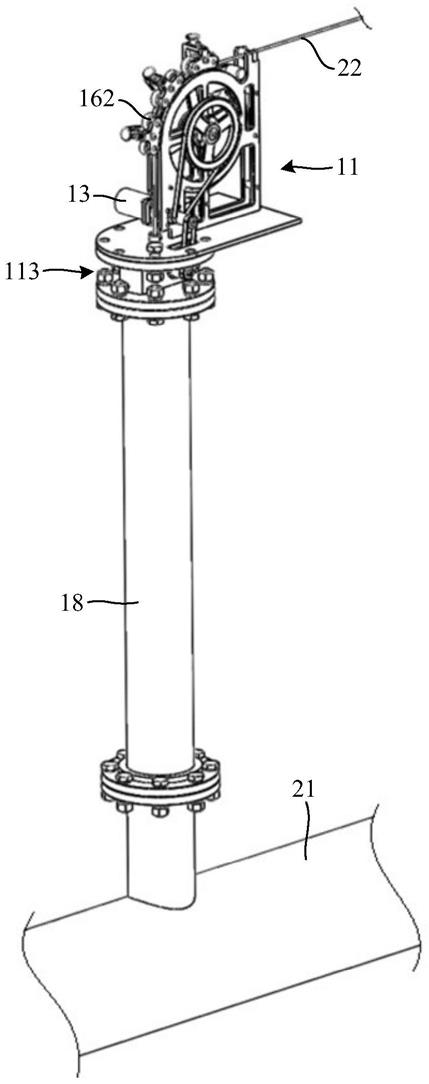
图1为本实用新型用于有缆管道机器人的自动收放装置的整体示意图。
[0027]
图2为本实用新型用于有缆管道机器人的自动收放装置中轮盘部分的正面立体图。
[0028]
图3为本实用新型用于有缆管道机器人的自动收放装置中轮盘部分的背面立体图,且管体处为部分剖视图。
[0029]
图4为本实用新型用于有缆管道机器人的自动收放装置中连接管部分的部分剖视图。
具体实施方式
[0030]
下面结合附图和具体实施例对本实用新型作进一步说明。
[0031]
本实用新型采用用于有缆管道机器人的自动收放装置,通过驱动电机驱动轮盘转动以收放线缆,放出线缆使得连接管中的机器人能够进入待检测的管道中,收回线缆使得待检测管道中的机器人返回,在收放线缆的过程中,若线缆张紧,则线缆顶抵感应件,使得感应件感应到线缆张紧,从而控制驱动电机调整轮盘的转速,以避免线缆被拉断,解决了线缆收放困难的问题,能够自动放出或收回线缆,且线缆的放线速度能够与机器人的行走速度相适配,以减少线缆卡阻或缠绕的情况,延长线缆的使用寿命,保证了机器人的信号传输。下面结合附图对本实用新型用于有缆管道机器人的自动收放装置进行说明。
[0032]
参阅图1,图1为本实用新型用于有缆管道机器人的自动收放装置的整体示意图。下面结合图1,对本实用新型用于有缆管道机器人的自动收放装置进行说明。
[0033]
如图1和图2所示,本实用新型用于有缆管道机器人的自动收放装置,用于自动收放连接于机器人的线缆22,包括:
[0034]
支架11,该支架11固定安装有驱动电机13;
[0035]
转动连接于支架11且供绕设线缆22的轮盘12,该轮盘12与驱动电机13驱动连接,通过驱动电机13带动轮盘12转动,以收放线缆22,该线缆22自轮盘12放出的端部与机器人固定连接;以及
[0036]
安装于支架11且靠近自轮盘12放出的线缆22设置的感应件15,该感应件15与驱动电机13控制连接,且自轮盘12放出的线缆贴合于感应件15的表面,通过感应件15感应到线缆22张紧,从而控制驱动电机13调整轮盘12的转速,当机器人前进时感应件15感应到线缆22张紧,则感应件15控制驱动电机13加快轮盘12的转速以与机器人前进的速度相匹配,以避免机器人行进速度与线缆22放出速度不匹配而导致线缆22被扯断的情况发生,也能够避免线缆22放出速度快于机器人的行进速度而导致线缆22堆积的情况发生。
[0037]
进一步的,还包括固定于支架11且供与待检测的管道21相连通的连接管18,该机器人和感应件15均位于连接管18中,自轮盘12放出的线缆22通过动密封组穿设于连接管18,由于待检测的管道21中有液体通过,设置连接管18能够防止待检测的管道21中的液体流出。
[0038]
进一步的,该驱动电机13形成有向外凸伸的驱动轴;
[0039]
该自动收放装置还包括转动连接于支架11且与轮盘12的中心固定连接的旋转轴以及中心固定连接于旋转轴的第一同步轮131,该第一同步轮131通过第一传动带1311与驱
动轴驱动连接,通过驱动电机13驱动该驱动轴转动,使得第一传动带1311带动第一同步轮131转动,从而第一同步轮131通过旋转轴带动轮盘12转动。
[0040]
具体的,结合图3所示,还包括靠近自轮盘12放出的线缆22设置且位于感应件15上方的第二同步轮132以及与第二同步轮132相对设置的导向轮14,该第二同步轮132通过第二传动带1321与驱动轴驱动连接,该线缆22夹设于第二同步轮132与导向轮14之间。
[0041]
较佳地,该第二同步轮132对应驱动轴形成有同步轴,同步轴与驱动轴通过第二传动带1321驱动连接,第一同步轮131和同步轴的直径比与轮盘12和第二同步轮132的直径比相同,以使得轮盘12和第二同步轮132的线速度相同。
[0042]
作为本实用新型的一较佳实施方式,该感应件15包括安装于支架11且可伸缩调节的伸缩杆、安装于伸缩杆且与自轮盘12放出的线缆相贴合的感应轮以及对应感应轮且安装于支架11的位移传感器;
[0043]
通过线缆22张紧以顶抵感应轮,使得伸缩杆收缩,进而位移传感器感应到感应轮的位置发生变化,从而控制驱动电机13调整轮盘12的转速。
[0044]
进一步的,还包括位置可调地安装于支架11且对应沿轮盘12的周沿间隔设置的若干压紧轮162,通过调节压紧轮162的位置,使得该压紧轮162对应抵住绕设于轮盘12上的线缆22,防止线缆22打滑。
[0045]
具体的,还包括转动连接于支架11且供安装压紧轮162的固定架16以及螺合于固定架16的螺栓161,通过转动固定架16,使得压紧轮162抵住绕设于轮盘12的线缆22,进而旋拧螺栓161,使得螺栓161抵住支架11以固定该固定架16的位置。
[0046]
进一步的,该支架11包括底板111、固定于底板111的顶面且相对设置的两个立板112以及固定于底板111的底面且供与连接管18固定连接的管体113;
[0047]
该驱动电机13固定安装于底板111,该轮盘12转动连接于相对的两个立板112之间,该底板111设置有供从轮盘12放出的线缆22穿过的动密封组1111,该感应件15对应安装于管体113内,由于待检测的管道21内有流动的液体,在底板111上设置动密封组1111以防止液体从该处涌出。
[0048]
进一步的,该线缆22收卷于线缆盘,该线缆的一端自线缆盘放出且自支架11远离感应件15的一侧穿入并绕过轮盘12与机器人固定连接,这种方式能够适配不同长度的线缆,使得应用范围更加广泛,相对的两个立板112在线缆22穿入支架11的位置形成有弧形凹槽,且该位置对应设置有线缆导向轮组,当线缆22偏斜时能够起到导向作用;
[0049]
该自动收放装置还包括转动安装于支架11靠近线缆22穿入处的张紧检测件17,即张紧检测件17设置于弧形凹槽处,该张紧检测件17对应抵压线缆22于轮盘12,该张紧检测件17与驱动电机13控制连接;
[0050]
通过线缆22张紧并顶起张紧检测件17,使得张紧检测件17转动并检测到线缆22张紧,从而控制驱动电机13加快轮盘12的转动速度,防止线缆22过度张紧而被拉断;
[0051]
由于线缆22通过动密封组1111穿入连接管18中,因此线缆22在该处受到摩擦力而对线缆22的放出速度产生影响,可能导致线缆22在穿入轮盘12与线缆穿出轮盘12处的速度不一致,所以在线缆22穿入和穿出的位置分别设置张紧检测件17和感应件15,以检测对应位置处线缆22的张紧状态,进而该张紧检测件17和感应件15控制驱动电机13以调节轮盘12和第二同步轮132的转速。
[0052]
较佳地,该管体113与连接管18通过法兰连接,该连接管18与待检测的管道21也通过法兰连接。
[0053]
具体的,该张紧检测件17包括一端转动连接于支架11的连接臂172、固定连接于该连接臂172的另一端且供抵压住线缆的张紧轮171以及垂直连接于连接臂172靠近支架11的一端的磁条173;
[0054]
该支架11与连接臂172之间连接有弹簧174以使得张紧轮171抵压住线缆22,该支架11靠近磁条173的位置安装有磁感应器114,该磁感应器114与驱动电机13控制连接;
[0055]
通过线缆22张紧并顶起张紧轮171,使得连接臂172转动,并带动磁条173转动,进而磁感应器114感应到磁条173的位置发生变化,从而控制驱动电机13加快轮盘12的转动速度。
[0056]
进一步的,还包括固定于连接管18中且相对设置的两根导向光轴181以及滑设于导向光轴181且供推抵机器人沿连接管18移动的下压件182,该下压件182的截面呈l形,且下压件182开设有供线缆22通过的条形孔;
[0057]
通过固定连接该连接管18与待检测的管道21,进而沿导向光轴181移动下压件182,使得下压件182推顶机器人至待检测的管道21中。
[0058]
较佳地,该导向光轴181的底部通过固定块与连接管18的底端固定连接,该固定块的端部均形成有成锥形的凹槽,以对机器人起到导向作用,防止机器人在该处卡住,且导向光轴181的底部与连接管18对应的端部固定,导向光轴181的顶部不与连接管18对应的端部固定,使得导向光轴181能够实现自调节,以保持导向光轴181的平行度和直线度,保证下压件182的正常运动。
[0059]
本实用新型的具体实施方法如下:
[0060]
将连接管18固定连接于待检测的管道21,从而连接管18与待检测的管道21相连通;
[0061]
将线缆22穿入轮盘12,绕过轮盘12后通过动密封组1111穿入管体113并夹设于第二同步轮132和导向轮14之间,该线缆22向连接管18内延伸并与机器人连接;
[0062]
转动固定架16,使得压紧轮162抵压在绕设于轮盘12的线缆22顶部,以防止线缆22在轮盘12转动时打滑,旋拧螺栓161,使得螺栓161抵住支架11对应部分,以固定该固定架16的位置;
[0063]
利用下压件182将机器人向待检测的管道21中压,同时启动驱动电机13,通过第一传动带1311带动第一同步轮131转动,第一同步轮131通过旋转轴带动轮盘12转动,以放出线缆22,同时驱动电机13通过第二传动带1321带动第二同步轮132转动,放出的线缆22经过第二同步轮132和导向轮14,防止线缆22卡在第二同步轮132和导向轮14处;
[0064]
感应件15向外推抵线缆22,使得该处的线缆22呈倾斜状,当线缆22张紧时,线缆22推顶感应件15,使得感应件15感应到线缆22张紧,进而控制驱动电机13对应加快轮盘12的转速,防止线缆22被拉断;
[0065]
若线缆22进入轮盘12处张紧,线缆22向上抬起张紧轮171,带动连接臂172转动,固定于连接臂172的磁条173也发生转动,磁感应器感114应到磁条173的位置发生变化,控制驱动电机13加快轮盘12的转速,以防止线缆22放出速度与机器人的移动速度不匹配;
[0066]
机器人检测完毕后,驱动电机13反向转动驱动轴,使得轮盘12将线缆22收起,且线
缆22拖拽机器人回到连接管18中,拆下连接管18并封堵住待检测的管道21;
[0067]
采用这种自动收放线缆的装置能够在机器人前进时放出线缆22,能够在机器人需要后退时,及时收起线缆22,防止线缆22出现卡阻或缠绕的问题,同时设置感应件15和张紧检测件17以防止机器人移动的速度和线缆22放出速度不匹配等问题,防止线缆22被扯断,延长线缆22寿命,保证线缆22能够将机器人采集的信息向外传输。
[0068]
以上结合附图实施例对本实用新型进行了详细说明,本领域中普通技术人员可根据上述说明对本实用新型做出种种变化例。因而,实施例中的某些细节不应构成对本实用新型的限定,本实用新型将以所附权利要求书界定的范围作为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1