一种显影辊清洗设备的上料装置以及显影辊清洗设备的制作方法
[0001]
本实用新型涉及显影辊加工技术领域,具体涉及一种显影辊生产过程中显影辊清洗设备的上料装置。
背景技术:
[0002]
打印机复印机成像是利用碳粉盒供应碳粉,并利用激光潜像技术进行显影成像。显影辊是碳粉盒的关键部件,碳粉盒的调色剂通过显影辊供应到感光鼓完成图像的显影,因此显影辊的质量将决定碳粉盒的成像质量。目前常见的显影辊是由金属轴心和套附于金属轴心外部并对金属轴心包裹密实的导电橡胶组成,在套胶完成后还需对橡胶表面进行打磨使橡胶表面均匀光滑,打磨掉的橡胶屑需要再清洗除去,目前的清洗方法通过人工运送显影辊至清洗线进行操作,但这种方法效率低下,耗时耗力,尤其在大批量生产过程中影响生产效率。
技术实现要素:
[0003]
本实用新型的第一目的旨在提供一种显影辊清洗设备的上料装置,能够实现显影辊清洗时的自动上料,自动化程度高、效率高;本实用新型通过以下技术方案实现:
[0004]
一种显影辊清洗设备的上料装置,用于将物料周转盘中平行且等间隔依次排列的各个显影辊上料至显影辊清洗设备的清洗池中;其特征在于,所述上料装置具有上料区以及传送区,所述上料装置包括:
[0005]
位于所述传送区的清洗传送装置,所述清洗传送装置包括若干个等间隔排列的用于固定显影辊的清洗夹具,所述清洗传送装置将各所述清洗夹具依次从接收位置传送至清洗位置;
[0006]
位于所述上料区的滑动装置,包括受控沿着第一预设方向往复移动的滑动平台,所述滑动平台具有物料周转盘的限位结构;
[0007]
第一搬运装置,具有将所述滑动平台上的物料周转盘上的显影辊分批搬运至所述接收位置的清洗夹具上的第一搬运机械手。
[0008]
进一步地,所述上料装置还具有待料区;所述上料装置还包括位于所述待料区的进料传送装置,所述进料传送装置将物料周转盘传送至所述待料区的待料位置;所述上料装置还包括将所述待料位置处的物料周转盘搬运至所述滑动平台上的第二搬运装置。
[0009]
进一步地,还包括收集所述滑动平台上的空的物料周转盘的空盘收集装置。
[0010]
具体地,所述空盘收集装置包括从所述滑动平台将空的物料周转盘移出的空盘移出组件以及空盘传送带。
[0011]
进一步地,所述第一搬运机械手具有n对用于夹取显影辊的搬运夹爪,所述搬运夹爪受控开合。
[0012]
进一步地,所述清洗夹具上的显影辊平行且等间隔地设置,所述清洗夹具上的显影辊的长度方向垂直于所述清洗传送装置的传送方向;每个所述清洗夹具上包括n对用于
固定所述显影辊的顶杯,每一对顶杯沿着第二预设方向相对设置,每一对顶杯在显影辊的两端对显影辊施力以固定所述显影辊;每一对顶杯中,一个所述顶杯位于所述搬运夹爪的近端侧,另一个所述顶杯位于所述搬运夹爪的远端侧。
[0013]
进一步地,所述清洗传送装置包括清洗传送带;各所述清洗夹具安装在所述清洗传送带上;每个所述清洗夹具还包括分别位于所述搬运夹爪的所述近端侧以及所述远端侧的一对导向支架,所述导向支架固定安装在所述清洗传送带上;所述顶杯沿着所述第二预设方向穿设于所述导向支架,所述顶杯与所述导向支架在所述第二预设方向上滑动连接;所述顶杯的顶杯前端与所述导向支架之间还设置有弹性元件,所述弹性元件向着所述顶杯前端对所述顶杯施力。
[0014]
进一步地,还包括控制所述接收位置处一侧的所述顶杯沿着所述第二预设方向往复移动的移动控制组件。
[0015]
具体地,所述移动控制组件包括受控沿着所述第二预设方向往复移动的拨动块。
[0016]
本实用新型的第二目的旨在提供一种显影辊清洗设备,包括清洗池以及第一目的的技术方案所述的上料装置;所述清洗位置的所述显影辊在所述清洗池内实施清洗。
[0017]
本实用新型的有益技术效果:
[0018]
本实用新型的显影辊清洗设备的上料装置能够实现显影辊清洗的自动上料,从而能够实现显影辊的自动化清洗,自动化程度高,人工成本低。
附图说明
[0019]
图1是本实用新型实施例提供的显影辊的结构示意图;
[0020]
图2是本实用新型实施例提供的盛满显影辊的物料周转盘的结构示意图;
[0021]
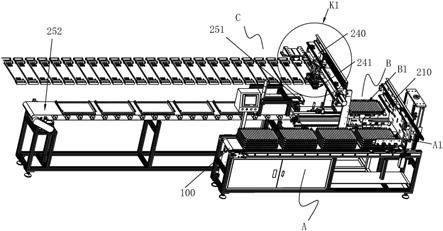
图3是本实用新型实施例提供的显影辊清洗设备的上料装置的机构示意图之一;
[0022]
图4是图3中k1部分的局部放大图;
[0023]
图5是本实用新型实施例提供的显影辊清洗设备的上料装置的机构示意图之二;
[0024]
图6是图5中k2部分的局部放大图;
[0025]
图7是本实用新型实施例提供的移动控制组件以及接收位置处的清洗夹具的结构示意图;
[0026]
附图标号说明:
[0027]
01-显影辊、02-导电橡胶、03-金属轴心、04-物料周转盘;
[0028]
a-待料区、a1-待料位置、b-上料区、b1-第一位置、b2-第二位置、c-传送区、c1-接收位置;
[0029]
100-进料传送装置、210-滑动平台、211-限位结构、220-第二搬运装置、221-第二机械手、230-第一直线运动模组、240-第一搬运装置、241-搬运夹爪、251-拨动部件、252-空盘传送带、310-清洗夹具、311-顶杯、3111-顶杯尾端、3112-顶杯前端、312-导向支架、313-安装支架、314-弹性元件、315-连杆、331-拨动块。
具体实施方式
[0030]
下面结合附图与具体实施方式对本实用新型作进一步详细的描述。
[0031]
需要指出的是,除非另有指明,本方案使用的所有技术和科学术语具有与本方案
所属技术领域的普通技术人员通常理解的相同含义。
[0032]
结合图1、2,显影辊01包括金属轴心03以及包裹在金属轴心上的导电橡胶02;在导电橡胶02打磨工序完成之后,各个显影辊01是通过物料周转盘04进行显影辊的存放,而在后续显影辊的清洗工序中,需要将显影辊各个显影辊放入清洗池进行清洗,如果靠人工进行显影辊的搬运,需要将显影辊从物料周转盘04中取出,放入清洗池,清洗完成在对显影辊进行回收,可见,采用人工的方式效率低下。
[0033]
本实施例提供一种显影辊清洗设备的上料装置,能够实现自动的将显影辊进行清洗上料,解决了人工的方式搬运显影辊效率低下的问题。
[0034]
结合图3~7,本实施例的给显影辊清洗设备上料的上装置用于将放置在物料周转盘04上的平行且等间隔依次排列的各个显影辊01的上料至显影辊自动清洗设备的清洗池中;所述上料装置具有待料区a、上料区b以及传送区c。
[0035]
本实用新型的上料装置包括位于所述待料区a的进料传送装置100、位于所述上料区b的滑动装置、位于所述传送区c的清洗传送装置。
[0036]
本实用新型的进料传送装置100将装满显影辊01的物料周转盘04传送至所述待料区a的待料位置a1;结合图1,待料位置a1处具有多盘从上到下依次堆叠放置的装满显影辊01的物料周转盘04。
[0037]
上料区b具有接盘的第一位置b1以及显影辊搬运的第二位置b2;滑动装置包括滑动平台210以及第一直线运动模组230,滑动平台210安装在第一直线运动模组230的移动滑块上,滑动平台210受控沿着第一预设方向(即第一直线运动模组230的直线运行方向)在第一位置b1以及第二位置b2往复移动,并且受控在第二位置b2向后步进移动,此处所述的向后步进移动的方位“向后”指的是向着远离第一位置b1的方位。
[0038]
滑动平台210的均具有物料周转盘04的限位结构211,从而能够限制物料周转盘在滑动平台210的位置。当滑动平台210位于第一位置b1时,第二搬运装置220将待料位置a1最上方的物料周转盘04搬运至滑动平台210上;当滑动平台210位于第二位置b2时,滑动平台210上的物料周转盘04内显影辊分批被搬运。第二搬运装置220为第二桁架机器人,其具有第二机械手221,第二机械手221实施物料周转盘04的夹取搬运。
[0039]
本实施例中第一预设方向是在上料区b中,垂直于滑动平台上物料周转盘内的显影辊的方向。
[0040]
清洗传送装置包括若干个等间隔排列的用于固定显影辊的清洗夹具310,所述清洗传送装置将各所述清洗夹具依次从接收位置c1传送至清洗位置(图中未示);各所述清洗夹具310上的显影辊01平行且等间隔地设置,清洗夹具310上的显影辊的长度方向垂直于所述清洗传送装置的传送方向;每个所述清洗夹具310上包括n对用于固定所述显影辊的顶杯311,每一对顶杯311沿着第二预设方向相对设置;本实施例中,第二预设方向为清洗传送装置上显影辊的长度方向。
[0041]
清洗传送装置包括清洗传送带(图中未示);各所述清洗夹具310安装在所述清洗传送带上;每个所述清洗夹具310还包括沿着所述清洗传送带的传送方向对称安装在所述清洗传送带上的第一组安装组件以及第二组安装组件;第一安装组件位于搬运夹爪241的远端侧,第二安装组件位于搬运夹爪241的近端侧;每一组所述安装组件包括导向支架312以及安装支架313,所述导向支架312、安装支架313均固定安装在所述清洗传送带上;每个
清洗夹具310还包括连接两个安装支架313的连杆315,连杆315的两端分别与两个安装支架313固定连接,连杆315能够保证两组安装组件的位置相对固定,从而能够保证每一对顶杯的位置始终是相对设置且与显影辊的长度方向是在一条直线上的,最终能让每一对顶杯311顶紧显影辊时不会错位。
[0042]
结合图7,每一对所述顶杯的两个顶杯对应沿着所述第二预设方向穿设于所述导向支架312,所述顶杯311与所述导向支架312在所述第二预设方向上滑动连接;所述顶杯311的顶杯前端3112与所述导向支架312之间还设置有弹性元件314,所述弹性元件314朝向顶杯前端3112对所述顶杯311施力。
[0043]
清洗传送装置还包括控制所述接收位置处的清洗夹具的第一安装组件一侧(即搬运夹爪241的远端侧)的各个所述顶杯沿着所述第二预设方向往复移动的移动控制组件。本实施例中移动控制组件包括受控沿着所述第二预设方向往复移动拨动块331,所述拨动块331受控拨动接收位置c1处的所述第一组安装组件的的各个顶杯的顶杯尾端3111沿着所述第二预设方向往复移动。当拨动块331向着清洗传送带的外侧移动时,带动该侧的各个顶杯向外移动,从而可以在各对顶杯支架放置显影辊;当拨动块331向着清洗传送带的内侧移动时,该侧的各个顶杯受弹性元件314的弹力作用下,回位顶紧固定显影辊。
[0044]
本实施例的移动控制组件仅控制搬运夹爪241的远端侧的顶杯的移动就能实现对显影辊的释放与固定;在其他实施例中,也可以是仅控制搬运夹爪241的近端侧的顶杯的移动实现对显影辊的释放与固定;在其他实施例,还可以是同时控制控制搬运夹爪241的近端侧及远端侧的顶杯的移动来实现对显影辊的释放与固定。
[0045]
进一步地,当滑动平台210位于第二位置b2时,滑动平台210上的物料周转盘04内显影辊分批被第一搬运装置240搬运至接收位置c1处的清洗夹具310上。本实施例中,第一搬运装置240为第一桁架机器人,第一桁架机器人具有n对用于夹取显影辊的搬运夹爪241,所述搬运夹爪241受控开合,当搬运夹爪受控闭合时,搬运夹爪夹紧显影辊两端的金属轴心,对显影辊实施搬运,当搬运夹爪受控打开时,释放显影辊两端的金属轴心;本实施例中,搬运夹爪241的开合为气动控制。
[0046]
特别地,每当第一搬运装置240从滑动平台210上的物料周转盘04上搬运一批(n个)显影辊,滑动平台210都会受控向后步进一步,以使每次第一搬运装置240的搬运夹爪241均从同一个位置夹取显影辊;从而能够简化整个上料装置的结构,并且简化第一搬运装置的搬运动作。
[0047]
在上料区b,还设置有用于收集所述滑动平台210上的空的物料周转盘的空盘收集装置。空盘收集装置包括空盘传送带252以及空盘移出组件;结合图3,空盘移出组件包括将滑动平台210上的空的物料周转盘04拨出到空盘传送带252上的拨动部件251;空盘传送带252将各个空盘传送至空盘收集位以实施空盘的统一收集管理。
[0048]
下面说明一下本实用新型的上料装置的工作流程:
[0049]
s1、盛放显影辊的物料周转盘04被放置在进料传送装置100上后,被传送至待料位置a1处;
[0050]
s2、当滑动平台210上没有物料周转盘04时(上一盘已经上料完成,并且空盘已经被收集),滑动平台210移动至第一位置b1处,第二搬运装置220将待料位置a1处的一盘物料周转盘04搬运至滑动平台210上。
[0051]
s3、滑动平台210从第一位置b1移动到第二位置b2处,在第二位置b2,第一搬运装置240滑动平台210上的物料周转盘04中夹取n个显影辊,将其传送到清洗传送装置的接收位置c1处。
[0052]
s4、在接收位置c1处,拨动块331受控向外拨动清洗夹具的一侧的顶杯311,从而能够在接收位置c1的清洗夹具放入显影辊,之后拨动块331受控向内移动,顶杯311回位顶紧固定显影辊,之后进行下一批n个显影辊的上料,每上料一批显影辊,滑动平台210受控向后做一次步进移动,直至滑动平台210上物料周转盘04内所有的显影辊上料完成。
[0053]
s5、拨动部件251受控拨动滑动平台210上物料周转盘04的一端,将该物料周转盘04拨动至空盘传送带252上;
[0054]
s6、滑动平台210受控移动到第一位置;
[0055]
s7、重复执行步骤s1~s6,直至所有的显影辊均上料完成。
[0056]
本实用新型还提供了一种显影辊清洗设备,包括清洗池以及上述所述的上料装置;所述清洗位置的所述显影辊在所述清洗池内实施清洗。
[0057]
本实用新型的显影辊清洗设备的上料装置以及显影辊清洗设备能够实现显影辊清洗的自动上料,自动化程度高,人工成本低。
[0058]
以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在实用新型的精神和原则之内,不经创造性所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1