一种拿放整理装置
1.本实用新型涉及搬运机器人领域,尤其是涉及一种拿放整理装置。
背景技术:
2.在日常生活或者办公环境中为了追求物品的使用效率,通常需要快速的从置物架上拿取,用完后便随意的放回置物架上,这样使得置物架上的物品凌乱,在影响美观的同时不利于第二次的拿用。
3.同时面对一次性物品的摆放,置物架上同类物品大量占用,使得置物架上易于拿放位置很可能被同类物体占用,使得难以满足使用者快速拿取的需求,同时一次性物品需要经常补充,使用者需要经常预先将补充的一次性物品放置于置物架上易于拿放位置,体验感不佳。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种拿放整理装置,通过摩天轮置物组件和抓取载运组件实现了常用品的整理和移放,并通过摩天轮置物组件的转动将需要快速拿放的物品置于最有利于使用者拿放的位置,改善了使用者对于物品的拿放体验。
5.本实用新型的目的可以通过以下技术方案来实现:
6.本实用新型中的拿放整理装置包括摩天轮置物组件和抓取载运组件,其中:
7.摩天轮置物组件包括底座和设于底座上的摩天轮架体,所述摩天轮架体上设有多个置物架;
8.抓取载运组件包括车体,所述车体上设有升降转台和多层载物台,所述升降转台上设有机械臂,所述机械臂上连接有机械爪,机械爪能够在升降转台、机械臂的配合下实现物品在置物架、多层载物台之间的拿放整理。
9.进一步地,所述摩天轮置物组件与所述抓取载运组件分体式设计,或设于所述多层载物台上构成一体式设计。
10.进一步地,所述摩天轮架体为六棱柱架体结构,所述摩天轮架体包括设于两侧的六边形轮盘和连接于两个六边形轮盘之间的水平连杆。
11.进一步地,所述水平连杆对应地连接于六边形轮盘的顶点处;
12.所述六边形轮盘的几何中心与所述底座轴接;
13.所述置物架通过轴承吊挂于所述水平连杆上;
14.摩天轮转盘能够绕其轴自转,使得所述置物架始终保证与水平面平行;
15.所述摩天轮置物组件还包括第一伺服电机,所述第一伺服电机的输出轴与六边形轮盘的转轴传动连接。以此控制摩天轮架体的启停和转速。
16.进一步地,所述车体上还设有摄像机和微处理器,所述微处理器与摄像机、升降转台、机械臂和机械爪电连接。
17.进一步地,所述车体上垂直设有两根丝杆,所述丝杆的底端通过轴承与车体连接,顶端上设有动力组件。
18.进一步地,所述升降转台包括底板和顶板;
19.丝杆贯穿所述底板并与所述底板螺接;
20.所述顶板上设有第二伺服电机和第三伺服电机,所述第二伺服电机和第三伺服电机的输出轴均贯穿所述顶板并分别与两根丝杆连接。
21.进一步地,所述底板上设有第一舵机,所述机械臂与所述第一舵机的输出轴连接,所述机械臂上还设有两个活动关节,并在活动关节处分别设有第二舵机、第三舵机;
22.所述机械臂的端部设有第四舵机,所述第四舵机的输出轴与所述机械爪连接。
23.进一步地,所述机械爪上设有第五舵机和指部,所述第五舵机的输出轴通过齿轮组件带动指部进行夹持动作。
24.进一步地,所述指部由柔性材料构成,以此可实现一定程度的自适应夹持,提升夹持牢度。
25.进一步地,所述车体上还设有摄像机和微处理器,所述微处理器分别与摄像机、第一伺服电机、第二伺服电机、第三伺服电机、第一舵机、第二舵机、第三舵机、第四舵机、第五舵机电连接。
26.与现有技术相比,本实用新型具使得置物架、多层载物台的物品能够按照预设的位置进行整理摆放,在提升摆放美感的同时方便于第二次的拿放,满足使用者的个性化拿放需求,具体摆放布局方式通过人机互动触控面板的形式向微处理器附带的外置存储器进行预设定,微处理器运行时进行预加载。同时本拿放整理装置实现一次性物品的补充,如将大量的一次性物品存放于多层载物台中,每天拿出不同种类的一次性物品放于置物架上,满足使用者的个性化需求,避免了同类物品大量占用易于拿放位置。
附图说明
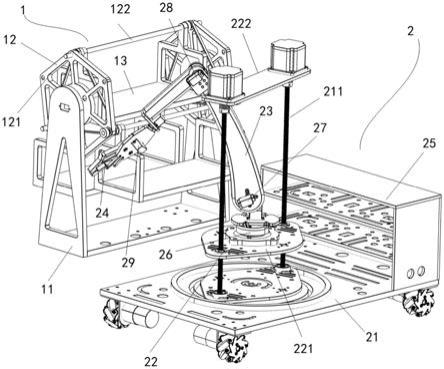
27.图1为本技术方案中拿放整理装置的结构示意图;
28.图2为本技术方案中机械爪的结构示意图;
29.图3为本技术方案中机械爪的侧方结构示意图。
30.图中:1、摩天轮置物组件,11、底座,12、摩天轮架体,121、六边形轮盘,122、水平连杆,13、置物架,2、抓取载运组件,21、车体,211、丝杆,22、升降转台,221、底板,222、顶板,23、机械臂,24、机械爪,241、第五舵机,242、指部,243、第二齿轮臂,244、齿轮,245、爪板,246、第二轴杆,247、第一齿轮臂,248、第一轴杆248,25、多层载物台,26、第一舵机,27、第二舵机,28、第三舵机,29、第四舵机。
具体实施方式
31.下面结合附图和具体实施例对本实用新型进行详细说明。
32.实施例
33.本实用新型中的拿放整理装置包括摩天轮置物组件1和抓取载运组件2,参见图1。
34.摩天轮置物组件1包括底座11和设于底座11上的摩天轮架体12,所述摩天轮架体12上设有多个置物架13,摩天轮置物组件1与所述抓取载运组件2分体式设计,或设于所述
多层载物台25上构成一体式设计。摩天轮架体12为六棱柱架体结构,所述摩天轮架体12包括设于两侧的六边形轮盘121和连接于两个六边形轮盘121之间的水平连杆122。水平连杆122对应地连接于六边形轮盘121的顶点处,六边形轮盘121的几何中心与所述底座11轴接,置物架13通过轴承吊挂于所述水平连杆122上,摩天轮转盘12能够绕其轴自转,使得所述置物架13始终保证与水平面平行。
35.抓取载运组件2包括车体21,所述车体21上设有升降转台22和多层载物台25,所述升降转台22上设有机械臂23,所述机械臂23上连接有机械爪24,机械爪24能够在升降转台22、机械臂23的配合下实现物品在置物架13、多层载物台25之间的拿放整理。摩天轮置物组件1还包括第一伺服电机,所述第一伺服电机的输出轴与六边形轮盘121的转轴传动连接,以此控制摩天轮架体12的启停和转速。
36.车体21上还设有摄像机和微处理器,所述微处理器与摄像机、升降转台22、机械臂23和机械爪24电连接。车体21上垂直设有两根丝杆211,所述丝杆211的底端通过轴承与车体21连接,顶端上设有动力组件。
37.升降转台22包括底板221和顶板222,丝杆211贯穿所述底板221并与所述底板221螺接,顶板222上设有第二伺服电机和第三伺服电机,所述第二伺服电机和第三伺服电机的输出轴均贯穿所述顶板222并分别与两根丝杆211连接。
38.底板221上设有第一舵机26,所述机械臂23与所述第一舵机26的输出轴连接,所述机械臂23上还设有两个活动关节,并在活动关节处分别设有第二舵机27、第三舵机28,机械臂23的端部设有第四舵机29,所述第四舵机29的输出轴与所述机械爪24连接。机械爪24上设有第五舵机241和指部242,所述第五舵机241的输出轴通过齿轮组件带动指部242进行夹持动作。
39.机械爪24包括爪板245,爪板245上设有第五舵机241,参见图3,爪板245上设有齿轮244,第五舵机241的输出轴与齿轮244的转轴传动连接,爪板245上还轴接有第一齿轮臂247、第二齿轮臂243、第一轴杆248、第二轴杆246,第一齿轮臂247和第二齿轮臂243上均铰接有指部242,第一轴杆248、第二轴杆246的一端分别铰接于两个指部242的中部。齿轮244与第一齿轮臂247上的齿轮啮合,第一齿轮臂247上的齿轮与第二齿轮臂243上齿轮啮合。
40.具体实施时,指部242的由柔性材料构成,以此可实现一定程度的自适应夹持,提升夹持牢度。
41.车体21底部设有转向器、第四伺服电机,以此控制车体21的位移。
42.车体21上还设有摄像机和微处理器,所述微处理器分别与摄像机、第一伺服电机、第二伺服电机、第三伺服电机、第一舵机26、第二舵机27、第三舵机28、第四舵机29、第五舵机241、转向器、第四伺服电机电连接。
43.具体运行时,微处理器选用arm处理器,摄像机实时获取图片信息,并将图片信息发至微处理器,微处理器对每张图片中每个像素块的rgb值进行分析,以此勾勒出图片中物体的边界轮廓,并将该边界轮廓的每点坐标信息与预加载的目标物体的边界轮廓的每点坐标信息进行对比,若相似程度接近预设的阈值,则表明匹配完成,微处理器指令第一伺服电机、第二伺服电机、第三伺服电机、第一舵机26、第二舵机27、第三舵机28、第四舵机29、第五舵机241、转向器、第四伺服电机做出对应的动作,使得置物架13、多层载物台25的物品能够按照预设的位置进行整理摆放,满足使用者的个性化拿放需求,具体摆放布局方式通过人
机互动触控面板的形式向微处理器附带的外置存储器进行预设定,微处理器运行时进行预加载。同时本拿放整理装置实现一次性物品的补充,如将大量的一次性物品存放于多层载物台25中,每天拿出不同种类的一次性物品放于置物架13上,满足使用者的个性化需求,避免了同类物品大量占用易于拿放位置。
44.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用实用新型。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本实用新型不限于上述实施例,本领域技术人员根据本实用新型的揭示,不脱离本实用新型范畴所做出的改进和修改都应该在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1