一种用于生物样本三维可调的移送设备的制作方法
[0001]
本实用新型涉及一种机械臂装置,特别是涉及一种用于生物样本三维可调的移送设备。
背景技术:
[0002]
机械臂在自动化仪器和设备中应用广泛,无论是在传统的工业制造、货物搬运等领域还是新兴的智能机器人、医疗设备等方面都有出色的表现。
[0003]
随着科技的发展,用于实验室或临床检验的自动化实验平台功能日趋完善,通过在同一平台上组合多种实验耗材、试剂、模块等可实现自动化实验流程,效率高且污染较少,能够广泛运用在各种实验中。
[0004]
在自动化实验中,需要频繁进行吸放液体和抓取耗材等操作,并将液体或耗材转移到需要的位置,这要求平台具有高精度定位装置和功能可靠的吸放液、耗材抓取等模块进行协作,快速完成平台内的样本处理操作。
技术实现要素:
[0005]
本实用新型的目的是提供一种用于生物样本三维可调的移送设备,以解决上述现有技术存在的问题,能够实现样本处理中样本、试剂和耗材的精确转移。
[0006]
为实现上述目的,本实用新型提供了如下方案:本实用新型提供一种用于生物样本三维可调的移送设备,包括:工作台、三轴机械臂、多通道移液器、机械抓手;所述工作台上表面设置有多组工位,多孔板放置在工位上;
[0007]
所述三轴机械臂包括x轴机械臂、y轴机械臂、z轴机械臂,分别独立地沿工作台水平面的x轴、y轴、z轴方向固定安装及移动,其中x轴机械臂沿工作台水平面固定安装在工位的一侧;y轴机械臂设置有两组,独立地间隔滑动安装在x轴机械臂上表面同一侧的两端;z轴机械臂设置有两组,独立地滑动安装在一组y轴机械臂的一侧;
[0008]
所述多通道移液器可拆卸地固定安装在一组z轴机械臂下端;
[0009]
所述机械抓手通过机械连接件固定安装在另一组z轴机械臂下端。
[0010]
优选的,其中所述x轴机械臂、y轴机械臂、z轴机械臂的运动方向x轴、y轴、z轴为两两夹角为90
°
。
[0011]
优选的,所述多通道移液器设置为空气置换方式的结构,用于吸和/或放试剂或物体,包括移液枪头和第三电机,所述移液枪头可拆卸地固定安装在多通道移液器前端,设置为带空气滤芯的枪头结构;所述第三电机用于驱动移液枪头沿z轴方向运动。
[0012]
优选的,所述机械抓手包括机械手指、传动结构外壳、滚动轴承、传动结构、第二电机、减速器;所述机械手指一侧固定安装在传动结构外壳底部一端;所述传动结构外壳另一端通过滚动轴承与传动结构相连接;所述传动结构的上端通过第二电机与减速器固定连接。
[0013]
优选的,还包括反向转轴、第一电机,所述机械手指一端通过螺纹与反向转轴固定
安装,所述反向转轴与第一电机传动连接,反向转轴通过机械连接件固定安装在传动结构外壳底部
[0014]
优选的,每组机械手指均独立地设置有一组压力传感器,所述压力传感器固定安装在机械手指内表面,用于传送和/或收集机械手指的抓取力度数据。
[0015]
优选的,所述三轴机械臂的每一组机械臂上、所述多通道移液器上均独立地设置有一组限位传感器,用于传送和/或收集机械臂的位置移动数据。
[0016]
优选的,还包括控制模块,所述控制模块通过can总线独立地与每组限位传感器、每组压力传感器、电机、第一电机、第二电机进行通信方式连接,用于数据和工作指令的交换。
[0017]
本实用新型公开了以下技术效果:本实用新型在三轴机械臂基础上,集成多通道移液器和机械抓手,实现生物样本处理过程中,样本、试剂和耗材的自动转移,且在机械抓手上安装了薄膜压力传感器,保证了耗材抓取可靠性,为自动化实验平台实现与运行提供了重要的基础。
附图说明
[0018]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0019]
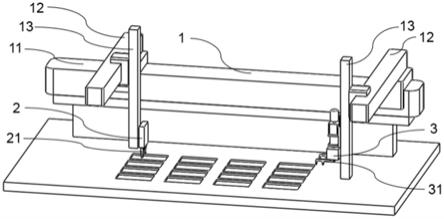
图1为本实用新型用于生物样本三维可调的移送设备外观示意图;
[0020]
图2本实用新型用于生物样本三维可调的移送设备中机械抓手结构示意图;
[0021]
图3本实用新型用于生物样本三维可调的移送设备中机械抓手侧视图;
[0022]
图4为本实用新型用于生物样本三维可调的移送设备的控制装置组成图;
[0023]
图中,1为三轴机械臂、2为多功能移液器、3为机械抓手、11为x轴机械臂、12为y轴机械臂、13为z轴机械臂、21为一次性移液枪头,31为机械手指、32为反向转轴、33为第一电机、34为薄膜压力传感器、35为传动结构、36为第二电机、37为减速器、38为滚珠轴承、39为传动结构外壳。
具体实施方式
[0024]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0025]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
[0026]
本实用新型提供一种用于生物样本三维可调的移送设备,包括:工作台、三轴机械臂、多通道移液器、机械抓手;所述工作台上表面设置有多组工位,多孔板放置在工位上;
[0027]
所述三轴机械臂包括x轴机械臂、y轴机械臂、z轴机械臂,分别独立地沿工作台水平面的x轴、y轴、z轴方向固定安装及移动,其中x轴机械臂沿工作台水平面固定安装在工位
的一侧;y轴机械臂设置有两组,独立地间隔滑动安装在x轴机械臂上表面同一侧的两端;z轴机械臂设置有两组,独立地滑动安装在一组y轴机械臂的一侧;三轴机械臂的y轴、z轴方向均为双臂结构,同时运动,通过伺服系统和运动丝杠来驱动。其中所述x轴机械臂、y轴机械臂、z轴机械臂的运动方向x轴、y轴、z轴为两两夹角为90
°
。
[0028]
两条臂分别搭载了多通道移液器和机械抓手,用于样本、试剂和耗材的转移。其中伺服系统采用现有的常规的型号,以能完成本实用新型的技术方案的伺服系统都在本实用新型的保护范围内。
[0029]
多通道移液器可拆卸地固定安装在一组z轴机械臂下端;多通道移液器设置为空气置换方式的结构,用于吸和/或放试剂或物体,包括移液枪头和第三电机,所述移液枪头可拆卸地固定安装在多通道移液器前端,设置为带空气滤芯的枪头结构;所述第三电机用于驱动移液枪头沿z轴方向运动。
[0030]
可选择地,述移液枪头设置为在多通道移液器下端自动加载一次性滤芯枪尖,采用空气置换方式吸取或释放耗材内的样本或试剂,多通道移液器每个通道独立工作,可同步或异步吸放液体。
[0031]
优选的,所述机械抓手通过机械连接件固定安装在另一组z轴机械臂下端。
[0032]
所述机械抓手包括机械手指、传动结构外壳、滚动轴承、传动结构、第二电机、减速器;所述机械手指一侧固定安装在传动结构外壳底部一端;所述传动结构外壳另一端通过滚动轴承与传动结构相连接;所述传动结构的上端通过第二电机与减速器固定连接。
[0033]
优选的,还包括反向转轴、第一电机,所述机械手指一端通过螺纹与反向转轴固定安装,所述反向转轴与第一电机传动连接,反向转轴通过机械连接件固定安装在传动结构外壳底部。
[0034]
机械抓手挂载在机械臂上,整体可旋转,具有两个机械手指,可自动开合,用于夹紧和松开耗材。
[0035]
每组机械手指均独立地设置有一组压力传感器,所述压力传感器固定安装在机械手指内表面,用于传送和/或收集机械手指的抓取力度数据。压力传感器优选地设置为薄膜压力传感器,可感知机械手指的抓取力度,判断抓取状态。
[0036]
优选的,所述三轴机械臂的每一组机械臂上、所述多通道移液器上均独立地设置有一组限位传感器,用于传送和/或收集机械臂的位置移动数据。
[0037]
还包括控制模块,所述控制模块通过can总线独立地与每组限位传感器、每组压力传感器、电机、第一电机、第二电机进行通信方式连接,用于数据和工作指令的交换。
[0038]
作为本实用新型的具体实施方式,控制模块为以微处理器为核心的主控制电路,用于负责与各电路单元通信,并进行数据和指令的交换。电路单元设置为三轴机械臂、多通道移液器和机械抓手的控制电路,负责控制各执行机构工作。其中本实用新型中控制模块和电路单元主控芯片为stm32嵌入式芯片,控制模块与各电路单元之间通过can总线进行通信。
[0039]
多通道移液器和机械抓手挂载在三轴机械臂上,通过机械臂运动至工作位置,各机构的运动由控制模块控制,通过控制模块发送指令和数据给各机构的电路单元,再由各电路单元驱动相应机构执行特定功能。
[0040]
本实用新型公开了以下技术效果:本实用新型在三轴机械臂基础上,集成多通道
移液器和机械抓手,实现生物样本处理过程中,样本、试剂和耗材的自动转移,且在机械抓手上安装了薄膜压力传感器,保证了耗材抓取可靠性,为自动化实验平台实现与运行提供了重要的基础。
[0041]
如图1所示,一种用于生物样本三维可调的移送设备,包括三轴机械臂1、多通道移液器2、机械抓手3,三轴机械臂1由x轴机械臂11、y轴机械臂12和z轴机械臂13,多通道移液器2可自动加装和卸载一次性移液枪头21,挂载在z轴机械臂13上,通过三轴机械臂1分别实现三维空间中的运动定位。机械抓手3包括了机械手指31、反向转轴32、第一电机33、薄膜压力传感器34、传动结构35、第二电机36、减速器37、滚珠轴承38、传动结构外壳39,其中两个机械手指31前端各安装有两个薄膜压力传感器34,当抓取耗材时,可感知其机械手指31的压力,判断当前抓取是否可靠。第一电机33驱动方向转轴32运动来控制机械手指31的开合。第二电机36转动,驱动减速器37和传动结构35来控制机械手指31旋转运动。机械抓手3挂载在另一条z轴机械臂13上,跟随三轴机械臂1在工作台的三维空间实现运动定位。所述机械手指31一侧固定安装在传动结构外壳39底部一端;所述传动结构外壳39另一端通过滚动轴承38与传动结构35相连接;所述传动结构35的上端通过第二电机36与减速器37固定连接。
[0042]
还包括反向转轴32、第一电机33,所述机械手指31一端通过滑轨与反向转轴32固定安装,所述反向转轴32与第一电机33传动连接,反向转轴32通过机械连接件固定安装在传动结构外壳39底部。
[0043]
以在自动化实验工作站中进行磁珠法核酸提取为例,在核酸提取前,将离心后的血液样本放入96孔深孔板后,放入工作站中。机械臂1带动多通道移液器2至一次性枪尖21存放工位,z轴机械臂13驱动多通道移液器2下降装载一次性移液枪尖21。机械臂1带动多通道移液器2定位至存放磁珠的试剂板中,吸取磁珠后转移至存放样本的96孔深孔板后释放磁珠,三轴机械臂1驱动多通道移液器2至废弃物工位,多通道移液器2自动卸载使用过的移液枪尖。三轴机械臂1驱动机械抓手3至样本工位,抓取存放样本的96孔深孔板至震荡工位,使核酸与磁珠结合。最后,三轴机械臂1驱动机械抓手3将震荡工位上的96孔深孔板转移到磁分离工位,通过多通道移液器2和机械抓手3的配合,进行核酸提取操作。
[0044]
在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0045]
以上所述的实施例仅是对本实用新型的优选方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1