一种高速精准定位堆垛机的制作方法
1.本实用新型属于堆垛机的技术领域,具体涉及一种高速精准定位堆垛机。
背景技术:
2.仓储物流的迅速发展,为了尽可能利用仓库面积,所以仓库的货架都是位置很高的大型货架,因此,用于从高层货架上快速存取货物的堆垛机就应运而生了。
3.但是现有的堆垛机在使用时还存在一些问题,现有的堆垛机在使用的时候,会将支撑臂伸长至物件的下方,然后支撑臂在运动至初始位置,进而能够完成对物体的搬运工作,但是现有的堆垛机在进行搬运的过程中,由于堆垛机本身的震动,进而会导致夹持部与连接件之间发生偏移,进而会导致位于夹持部上的物体位置发生偏移,进而造成堆垛工作的失败。
4.因此,如何减少夹持部与连接件之间的偏移,是目前要解决的一个问题。
技术实现要素:
5.实用新型目的:提供一种高速精准定位堆垛机,以解决现有技术存在的上述问题。
6.技术方案:一种高速精准定位堆垛机,包括:
7.支撑架本体,设置在所述支撑架本体上的驱动单元,以及位于所述驱动单元上的支撑单元;
8.所述支撑单元包括设置在所述驱动单元上的一组连接件,位于所述连接件上、且与所述连接件可滑动连接的夹持部,设置在所述夹持部上的至少两组限位块,设置在所述限位块上的至少两组从动轮,以及对称安装在所述连接件上的一组限位导轨。
9.在进一步的实施例中,所述支撑单元还包括固定安装在所述连接件上的驱动电机,设置在所述驱动电机输出端的驱动齿轮,对称安装在所述连接件上的一组从动齿轮,同于连接所述驱动齿轮和从动齿轮的传动皮带,所述传动皮带与夹持部连接,能够使夹持部位于物体的底部,进而能够完成对物体支撑工作,进而保证堆垛工作的顺利进行,运动的限位块能够位于限位导轨上并在所述限位导轨上滑动连接,进而能够使夹持部不会发生偏移。
10.在进一步的实施例中,所述连接件两侧还设有至少三组导向轮,所述导向轮与夹持部抵接,能够减少夹持部与连接件之间的摩擦力,进而提高装置的运输效率。
11.在进一步的实施例中,所述驱动单元包括与所述支撑架固定连接的提升电机,设置在所述提升电机输出端的传动丝杆,套接在所述传动丝杆上的传动部,以及对称安装在所述传动部上一组的支撑臂,所述连接件位于支撑臂上,能够将物体放置指定位置,保证堆垛工作的顺利进行。
12.在进一步的实施例中,所述传动部上还对称安装有至少两组提升滑块,以及对称安装在所述支撑架上的一组提升滑轨,所述提升滑块位于所述提升滑轨、且与所述提升滑轨滑动连接,通过设置的提升滑块和提升滑轨,进而能够提升装置的高度,进而便于装置完
成堆垛工作。
13.在进一步的实施例中,所述支撑架上还设有限位板,所述限位板上还设有一组通槽,能够起到对装置内部零件的保护工作,进而避免装置的损坏。
14.有益效果:本实用新型涉及一种高速精准定位堆垛机,为了减少夹持部与连接件之间的偏移,进而设有支撑单元,通过设置的限位块和限位滑轨的配合使用,进而在夹持部伸长和缩回的过程中,限位块能够起到导向的工作,当夹持部开始运动,进而运动的夹持部能够带动限位块开始运动,从而运动的限位块能够位于限位导轨上并在所述限位导轨上滑动连接,进而能够使夹持部不会发生偏移,同时在所述限位块上还设有从动轮,进而提高设置的从动轮,进而能够减少限位块与限位导轨之间接触面积,进而从原有的面与面接触变成点与面的接触,进而能够减少限位块与限位导轨之间的摩擦,进而保证装置的顺利运行。
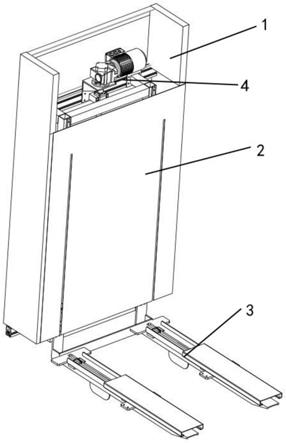
附图说明
15.图1为本实用新型的立体图。
16.图2为本实用新型中支撑单元示意图。
17.图3为本实用新型中驱动单元示意图。
18.图中各附图标记为:支撑架1、限位板2、支撑单元3、连接件31、驱动电机32、驱动齿轮33、从动齿轮34、导向轮35、夹持部36、限位导轨37、限位块38、从动轮39、驱动单元4、提升电机41、传动丝杆42、传动部43、提升滑轨44、提升滑块45、支撑臂46。
具体实施方式
19.经过申请人的研究分析,出现这一问题(夹持部与连接件之间发生偏移,进而会导致位于夹持部上的物体位置发生偏移,进而造成堆垛工作的失败)的原因在于现有的堆垛机在使用的时候,会将支撑臂伸长至物件的下方,然后支撑臂在运动至初始位置,进而能够完成对物体的搬运工作,但是现有的堆垛机在进行搬运的过程中,由于堆垛机本身的震动,进而会导致夹持部与连接件之间发生偏移。本实用为了减少夹持部与连接件之间的偏移,进而设有支撑单元,通过设置的限位块和限位滑轨的配合使用,进而在夹持部伸长和缩回的过程中,限位块能够起到导向的工作,当夹持部开始运动,进而运动的夹持部能够带动限位块开始运动,从而运动的限位块能够位于限位导轨上并在所述限位导轨上滑动连接,进而能够使夹持部不会发生偏移,同时在所述限位块上还设有从动轮,进而提高设置的从动轮,进而能够减少限位块与限位导轨之间接触面积,进而从原有的面与面接触变成点与面的接触,进而能够减少限位块与限位导轨之间的摩擦,进而保证装置的顺利运行。
20.一种高速精准定位堆垛机,包括:支撑架1、限位板2、支撑单元3、连接件31、驱动电机32、驱动齿轮33、从动齿轮34、导向轮35、夹持部36、限位导轨37、限位块38、从动轮39、驱动单元4、提升电机41、传动丝杆42、传动部43、提升滑轨44、提升滑块45、支撑臂46。
21.装置包括,支撑架1本体,设置在所述支撑架1本体上的驱动单元4,以及位于所述驱动单元4上的支撑单元3;所述支撑单元3包括设置在所述驱动单元4上的一组连接件31,位于所述连接件31上、且与所述连接件31可滑动连接的夹持部36,设置在所述夹持部36上的至少两组限位块38,设置在所述限位块38上的至少两组从动轮39,以及对称安装在所述连接件31上的一组限位导轨37,通过设置的限位块38和限位滑轨的配合使用,进而在夹持
部36伸长和缩回的过程中,限位块38能够起到导向的工作,当夹持部36开始运动,进而运动的夹持部36能够带动限位块38开始运动,从而运动的限位块38能够位于限位导轨37上并在所述限位导轨37上滑动连接,进而能够使夹持部36不会发生偏移,同时在所述限位块38上还设有从动轮39,进而提高设置的从动轮39,进而能够减少限位块38与限位导轨37之间接触面积,进而从原有的面与面接触变成点与面的接触,进而能够减少限位块38与限位导轨37之间的摩擦,进而保证装置的顺利运行。
22.所述支撑单元3还包括固定安装在所述连接件31上的驱动电机32,设置在所述驱动电机32输出端的驱动齿轮33,对称安装在所述连接件31上的一组从动齿轮34,同于连接所述驱动齿轮33和从动齿轮34的传动皮带,所述传动皮带与夹持部36连接,当需要堆垛机进行堆垛工作时,此时驱动电机32开始工作,进而运动的驱动电机32能够带动驱动齿轮33开始工作,进而转动的驱动齿轮33能够带动传动皮带开始工作,进而运动的传动皮带能够带动从动齿轮34开始转动,同时运动的传动皮带能够带动夹持部36在连接件31上发生运动,进而能够使夹持部36位于物体的底部,进而能够完成对物体支撑工作,进而保证堆垛工作的顺利进行。
23.所述连接件31两侧还设有至少三组导向轮35,所述导向轮35与夹持部36抵接,通过设置的导向轮35,进而能够将减少夹持部36与连接件31之间的接触面积,进而能够减少夹持部36与连接件31之间的摩擦力,进而提高装置的运输效率。
24.所述驱动单元4包括与所述支撑架1固定连接的提升电机41,设置在所述提升电机41输出端的传动丝杆42,套接在所述传动丝杆42上的传动部43,以及对称安装在所述传动部43上一组的支撑臂46,所述连接件31位于支撑臂46上,当物体位于夹持部36上后,此时驱动电机32反向工作,进而能够使夹持部36位于初始位置,此时提升电机41开始工作,进而运动的提升电机41能够带动传动丝杆42开始工作,进而运动的传动丝杆42能够带动传动部43开始工作,进而运动的传动部43能够带动支撑臂46开始工作,进而运动的支撑臂46能够带动连接件31开始运动,进而能够提升连接件31的高度,直至位于既定位置,然后驱动电机32开始工作,进而能够将物体放置指定位置,保证堆垛工作的顺利进行。
25.所述传动部43上还对称安装有至少两组提升滑块45,以及对称安装在所述支撑架1上的一组提升滑轨44,所述提升滑块45位于所述提升滑轨44、且与所述提升滑轨44滑动连接,通过设置的提升滑块45和提升滑轨44,进而能够提升装置的高度,进而便于装置完成堆垛工作。
26.所述支撑架1上还设有限位板2,所述限位板2上还设有一组通槽,通过设置的限位板2,能够起到对装置内部零件的保护工作,进而避免装置的损坏。
27.工作原理说明:当需要堆垛机进行堆垛工作时,此时驱动电机32开始工作,进而运动的驱动电机32能够带动驱动齿轮33开始工作,进而转动的驱动齿轮33能够带动传动皮带开始工作,进而运动的传动皮带能够带动从动齿轮34开始转动,同时运动的传动皮带能够带动夹持部36在连接件31上发生运动,进而能够使夹持部36位于物体的底部,进而能够完成对物体支撑工作,进而保证堆垛工作的顺利进行;通过设置的限位块38和限位滑轨的配合使用,进而在夹持部36伸长和缩回的过程中,限位块38能够起到导向的工作,当夹持部36开始运动,进而运动的夹持部36能够带动限位块38开始运动,从而运动的限位块38能够位于限位导轨37上并在所述限位导轨37上滑动连接,进而能够使夹持部36不会发生偏移;当
物体位于夹持部36上后,此时驱动电机32反向工作,进而能够使夹持部36位于初始位置,此时提升电机41开始工作,进而运动的提升电机41能够带动传动丝杆42开始工作,进而运动的传动丝杆42能够带动传动部43开始工作,进而运动的传动部43能够带动支撑臂46开始工作,进而运动的支撑臂46能够带动连接件31开始运动,进而能够提升连接件31的高度,直至位于既定位置,然后驱动电机32开始工作,进而能够将物体放置指定位置,保证堆垛工作的顺利进行。
28.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1