用于安全钳的触发系统、电梯设备和运行电梯设备的方法与流程
1.本发明涉及一种用于电梯设备中的安全钳的触发系统、这种电梯设备和用于运行电梯设备的方法。
背景技术:
2.除了具有一个在井道中移动的轿厢的电梯或电梯设备之外,还存在具有两个在同一井道中彼此上下相叠地移动的轿厢的电梯。这在高层建筑中尤其有利,因为可以更好地利用可用空间。这种电梯设备由申请人以商标名称twin销售。
3.当运行这样的电梯设备时,必须注意两个轿厢不要彼此靠得太近,尤其是不要彼此接触。尤其是在紧急情况下,例如,两个轿厢向同一方向移动,但前面的轿厢突然停下来,可能需要紧急制动或紧急停止,以防止两个轿厢相撞。例如从ep 1 562 848 b1已知用于防止这种碰撞的安全监控。
4.在这种电梯中,除了驱动器的运行制动器外,尤其是在这种运行制动器的制动效果不充分的情况下,通常在两个轿厢的每一个上都设置安全钳,通过其可以防止轿厢的快速下行或坠落。此外,可以为下部轿厢在轿厢上设置制动装置,通过该制动装置可以快速且可靠地停止上行运动。轿厢上的这种制动装置由缆索制动器触发,这种缆索制动器的形式例如从ep 1 646 575 b1中已知。
5.代替用于轿厢的制动装置,至少对于在井道中仅具有一个轿厢的传统电梯设备而言,还可以在轿厢的对重上设置安全钳。然而,尤其是在井道中有两个轿厢并且由此通常需要两个对重彼此并排布置的电梯设备中,通常不可能使用具有环绕缆索的机械限速器。由于没有悬挂电缆,轿厢上的安全钳也无法电动触发。
6.在此背景下需要提供一种简单和/或有效和/或可靠的解决方案,用于实现触发对重上的制动装置,以用于电梯设备的轿厢,尤其是在一个井道中具有两个轿厢的电梯设备的下部轿厢在上行方向上的制动。
技术实现要素:
7.根据本发明,提出了具有独立权利要求特征的用于安全钳的触发系统、电梯设备和用于运行电梯设备的方法。有利的设计方案是从属权利要求和以下说明的主题。
8.根据本发明的触发系统可用于安全钳(fangvorrichtung),该安全钳可附接到通过经由与驱动器耦合的驱动轮引导的吊具与轿厢相连并在井道中引导的对重上,或者在可能情况下附接到轿厢上。吊具尤其可以是拉力吊具,例如缆索或皮带。多个缆索或皮带也是可行的。安全钳尤其设计成使得其可以与导轨或类似物接合,对重沿着该导轨或类似物移动。
9.触发装置具有可张紧在井道中的立式张紧装置(尤其缆索)、需要时可在张紧装置的纵向方向上在张紧装置上施加力的致动装置、以及耦联装置,通过该耦联装置,张紧装置和安全钳可以以这样的方式耦联,即,当在缆索上施加力时可以触发安全钳。
10.正如开头已经提到的,对于用于触发安全钳的常见限速器使用环绕的缆索,该缆索在电梯设备的井道中在上端和下端(通常是井道头和井道底坑)之间,即在当将安全钳布置在对重(或者也包括在轿厢)上时其所能够移动的区域之间张紧在滚轮之间。
11.与此相反,在所提出的触发装置中仅使用一个张紧装置或缆索,其尤其可以在井道的上端和下端之间张紧,由此在井道中所需的自由空间显著减少。因此,用于将力施加在张紧装置上的耦联装置例如可以布置上端或机器间中,由此其也可以以特别简单的方式电触发,因为无需与对重进行电气连接。在上端,可以例如通过耦联装置固定张紧装置,这将在后面更详细地说明。在下端,张紧装置例如可以固定在底部上,或者它可以通过可能情况下也固定在底部上的张紧质量块来张紧。如果需要,可以在此处设置棘轮装置或自由轮,以防止张紧装置或缆索在张紧质量块处向上移动并吸收缆索伸长。
12.通过耦联装置,作用在张紧装置上的力可以传递到安全钳上,从而以这种方式触发安全钳。对于这种耦联装置的可能设计方案,参考以下内容。
13.总体而言,以这种方式提供了一种用于可附接到对重上的安全钳的触发系统,其特别简单且节省空间,并且也不需要与安全钳本身或对重的电连接。
14.如已经提到的,致动装置优选可以被电触发。为此,致动装置尤其具有电磁体,通过该电磁体可以触发致动装置。通过电磁体,当施加电流时,对应物可以被电磁力保持。通过简单地中断电流,例如通过打开开关,可以因此触发耦联装置并由此触发安全钳。在这种情况下,电磁体也称为气隙磁体(l
ü
ftmagnet)。
15.致动装置优选地具有弹簧元件和/或杠杆臂,通过其可以将力直接或间接地施加在张紧装置上。例如,弹簧元件,例如压缩弹簧,可用于在杠杆臂上施加力,张紧装置也固定在该杠杆臂上。杠杆臂可以通过上述电磁体例如抵抗弹簧元件的力保持在初始位置。当触发时,弹簧元件的力可以被释放,由此通过杠杆臂在张紧装置上施加力,并且通过该力触发安全钳。
16.此外还优选的是,为致动装置设置复位装置,尤其具有线性驱动器,通过该复位装置可以在触发后将致动装置从致动位置带入释放位置。由此,致动装置可以在可能的触发之后以特别简单的方式重新回到初始位置。为此,复位装置尤其也可以设计为可远程操作的。这种复位装置尤其也可以(或仅)设置用于安全钳。
17.特别优选的是,耦联装置具有致动元件,当在张紧装置上施加力时,该致动元件导致安全钳的触发或致动。耦联装置为此尤其可以具有引导系统,该引导系统包括致动元件和引导元件,张紧装置在该引导系统中被引导,其中致动元件相对于引导元件是可移动的,并且尤其设置用于当在张紧装置上施加力时被移动。引导元件和致动元件都可以设计为滚轮,张紧装置或缆索沿着该滚轮移动。通过相对于彼此的侧向偏移和合适的布置由此可以实现,由耦联装置在纵向方向上施加在张紧装置上的附加力被转换成具有至少一个垂直于张紧装置的纵向的分量的力。
18.如果致动元件通过弹簧元件或类似物克服由张紧装置的现有张力作用的力而保持在常规状态或初始位置,那么通过这种弹簧元件的合适尺寸可以使附加的力移动致动元件。该致动元件可以例如通过合适的连接机构致动或触发安全钳。对于耦联装置的更详细说明在这一点上也参考附图说明。
19.例如,安全钳本身具有止推楔块,其可被置于对重导轨和对应物之间。但例如,压
靠在导轨上的制动衬片也是可行的。根据安全钳的具体设计方案,耦联装置可以设计用于将致动元件的运动转换为安全钳的致动或触发。
20.本发明还涉及一种电梯设备,该电梯设备具有至少一个可在井道中移动的轿厢、通过经由与驱动器耦合的驱动轮引导的吊具与轿厢相连并在井道中引导的对重、布置在该对重上的安全钳和根据本发明的触发系统。特别优选的是,如已经提到的那样,致动装置布置在包括驱动器的机器间中。
21.关于进一步的优点和设计方案以及对电梯设备的更详细的说明,在这一点上还应参考上述关于触发系统的说明,其相应地在此处适用。
22.此外,特别优选的是,电梯设备具有另外的轿厢,该另外的轿厢在井道中布置在轿厢上方并且可以移动。在这种情况下特别适用本发明的优点,因为如开头所述,由于空间要求,迄今为止难以在这样的电梯设备中在对重上提供安全钳。不言而喻,以同样的方式,安全钳必要时也可以设置在该另外的轿厢的对重上并触发。
23.安全钳或另外的安全钳优选地进一步与张紧装置耦联,使得该安全钳或该另外的安全钳在其相对于张紧装置的速度超过极限值时被触发。在此可以使用用于安全钳的传统触发机构,其例如具有摩擦轮,以提供进一步的安全水平。在此可以使用同一根缆索。然而,与借助上述触发装置的触发相比,这里通常仅可能进行与速度相关的触发。
24.有利地,电梯设备还具有控制装置,该控制装置设置用于探测两个轿厢之间的距离和/或相对速度,并且如果距离低于相关的极限值或相对速度超过相关的极限值,则致动该致动装置。这里需要注意的是,在距离的情况下需低于极限值,而在相对速度的情况下需超过极限值。
25.这使得所提出的触发装置能够以特别有效和可靠的方式使用。在此使用的控制装置例如可以是单独的安全控制装置,但或者也可以是通常无论如何都用于整个电梯设备的控制装置。
26.本发明还涉及一种用于运行具有轿厢的电梯设备的方法,为此设置有通过经由与驱动器耦合的驱动轮引导的吊具与轿厢相连并在井道中引导的对重。如有必要,通过借助于致动装置沿张紧装置的纵向在张紧在井道中的立式的张紧装置,尤其是缆索上施加力来制动对重的运动,由此借助于耦联装置触发附接在对重上的安全钳。
27.优选地,仅当下部轿厢向上移动时才触发耦联装置。这可以例如使用合适的控制装置来完成,其中轿厢的运动方向是已知的或被探测。另一轿厢也有利地在(第一个并且因此下部的)轿厢上方在井道中移动。然后在此优选还检测两个轿厢之间的距离和/或相对速度,并且如果距离低于相关的极限值或相对速度超过相关的极限值,则触发耦联装置。这里需要注意的是,在距离的情况下需低于极限值,而在相对速度的情况下需超过极限值。
28.关于根据本发明的方法的进一步的设计方案和优点,为了避免重复,参考上面关于触发系统和电梯设备的说明,其在此相应地适用。
29.本发明的进一步优点和设计方案从说明和附图中给出。
30.不言而喻,在不脱离本发明的范围的情况下,上面提到的和下面将要解释的特征不仅可以以分别指定的组合使用,而且可以以其他组合或单独使用。
附图说明
31.根据附图中的实施例示意性地示出本发明并且在下面参照附图进行说明。
32.图中
33.图1示意性地示出了根据本发明的电梯设备的一个优选实施形式。
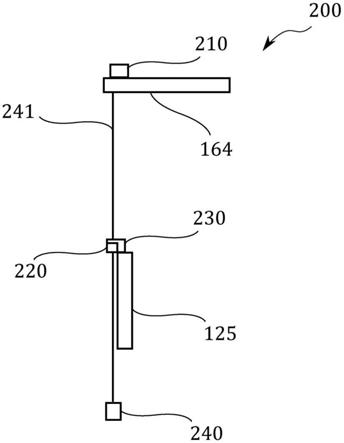
34.图2示意性地示出了根据本发明的触发系统的一个优选实施形式。
35.图3以更详细的图示示意性地示出了来自图2的触发系统的一部分。
36.图4以更详细的图示示意性地示出了来自图2的触发系统的一部分。
具体实施方式
37.在图1中,示意性地示出了根据本发明的电梯设备100的一个优选实施形式。电梯设备100具有井道110,在该井道中,两个轿厢彼此相叠,即下部轿厢120和上部轿厢121。两个轿厢可以彼此独立地在井道110中移动。例如,这可以通过这里仅示意性地表示的控制装置190进行,该控制装置例如也可以设置在井道110的上端的所示的机器间160中。
38.这里,用于下部轿厢120的具有驱动轮162的驱动器161设置在机器间160中。驱动器例如布置在机器间160的底部164上或布置在底部处。呈缆索形式的吊具111,尤其是拉力吊具经由该驱动轮162(并且可能情况下还通过转向轮,如图所示)引导,通过该吊具将下部轿厢120与相应的第一对重125连接。轿厢120和第一对重125因此可以在井道中沿相反方向上下移动。
39.为上部轿厢121相应地设有第二对重126。轿厢121和第二对重126可以像下部轿厢120和第一对重125一样通过吊具连接,该吊具通过驱动器上的驱动轮引导。然而,为了清楚起见,在所示的图示中没有示出另外的驱动器和另外的驱动轮。
40.两个对重125和126在井道110中并排布置,即两个对重在井道110的底部上的垂直投影彼此并排。两个对重尤其也布置在井道110的壁上或靠近井道的壁,以确保电梯设备的正确运行。
41.此外,在下部轿厢120上设置有第一安全钳140,以防止轿厢在紧急情况下在井道110中坠落。相应地,在上部轿厢121上设有第二安全钳141。
42.在此处所示的、在井道110中具有彼此相叠的两个轿厢的电梯设备中,必须确保可靠地防止两个轿厢之间的碰撞。虽然例如所提及的安全钳141为此目的用于上部轿厢的下行运动,但须为下部轿厢提供另外的装置以制动不希望的上行运动,例如,如果其太靠近上部轿厢时。
43.为此,如上所述,还尤其可以例如使用控制装置190和可能合适的传感器等来监控两个轿厢彼此之间的距离和/或相对速度。
44.为了下部轿厢120将第三安全钳230布置在相对应的第一对重125上。然而,利用常规装置,与第一对重125的速度无关地触发该第三安全钳230是不可能的,或者仅在需要相当大的结构花费下才可能。
45.如前所述,这种对重没有能够实现电动触发安全钳的悬挂电缆。已知的机械限速器需要环绕的缆索,由于两个对重彼此并排布置,由于自由空间有限,该缆索通常不能使用。如上所述,由此通常同样只能进行与速度相关的触发。
46.现在为该第三安全钳230设置触发系统,其具有在第一对重125上的耦联装置220
和布置在机器间160中的致动装置210。对此更详细的说明,请参考以下附图。
47.在图2中,示意性地示出了根据本发明的触发系统200的一个优选实施形式,其例如可以与图1所示的电梯设备或存在于此的对重上的安全钳一起使用。
48.对此,如图1中已经指出的那样,在此再次示出了致动装置210,其尤其布置在机器间中,例如在其底部164上,以及与第三安全钳230一起布置在第一对重125上的耦联装置220。
49.此外,示出了设计为缆索的张紧装置241,其可以布置在致动装置210和张紧质量块240之间,该张紧质量块可以布置在井道底部的附近(例如在井道底坑中)。张紧装置241因此可以被张紧。为此,张紧质量块240尤其可以通过棘轮装置或自由轮固定,使得张紧装置的屈服,尤其是张紧装置的向上运动是不可能的。然而,还可以想到以其他方式将张紧装置241紧固到井道底部。
50.此外,张紧装置241穿过耦联装置220,通过该耦联装置可以触发第三安全钳230。更详细的说明参见图3。
51.在图3中,更详细地示意性地示出图2的触发系统的一部分,并且以两个视图示出。触发系统的非触发位置或初始位置在左侧示出,触发位置或致动位置在右侧示出。
52.在致动装置210中,张紧装置241固定在杠杆臂211上,该杠杆臂围绕枢转点212可旋转地支承。通过尤其设计为压缩弹簧的第一弹簧元件213,在杠杆臂211上向上施加力。在这种情况下,设置电磁体214,其在通电状态下抵抗第一弹簧元件213的弹力保持杠杆臂211,如左图所示。
53.现在,在耦联装置220中设置了引导系统,该引导系统包括两个设计为引导滚轮的引导元件223和224和尤其设计为滚轮的致动元件221。缆索241在引导元件223和224之间偏转并且在致动元件221上被引导。现在由张紧的缆索241在致动元件221上施加在此由f
n
表示的力。
54.另外,尤其设计为拉力弹簧的另外的第二弹簧元件222附接到致动元件221上,通过该第二弹簧元件将在此由f
f
表示的力抵抗由张紧装置引起的力施加在致动元件221上。在正常状态或正常运行中,致动元件221处于所示位置。这可以通过适当设置张紧装置241和弹簧元件222的张力来实现,即于是f
f
>=f
n
成立。
55.现在右侧示出以下情况,其中触发系统200或致动装置210以及因此安全钳(为此也参考图4)被触发。通过使电磁体214切换为无电流的,例如通过主动中断供电,第一弹簧元件213可以向上拉动杠杆臂211并因此向上拉动紧固到其上的张紧装置241或向其施加力,这里由f
z
表示。在这里,例如通过所提及的控制装置来控制电磁体或为其通电。
56.这导致由张紧装置241在致动元件221上施加额外的相应力f'
z
,使得由此出现的由张紧装置施加的力f
n
+f'
z
超过弹簧元件的力f
f
(正常运行),即有f
n
+f'
z
>f
f
成立。致动元件221因此被移动直到力的平衡出现,由此触发或致动安全钳230。
57.在图4中,更详细地示意性地示出了来自图2的触发系统的一部分。在此尤其仅示意性地并且示例性地示出耦联装置210(图3中已经示出)和安全钳230。
58.在所示示例中,安全钳具有杠杆臂系统232,该安全钳通过该杠杆臂系统连接到致动元件221。通过在触发系统被触发的情况下致动元件221向左移动,如参考图3所解释的,可以借助于该杠杆臂系统221将楔块231,尤其制动或止推楔块压入或者拉入引导轨道和对
应物之间,如箭头所示。
59.不言而喻,也可以使用其他类型的安全钳,例如具有不同类型连接的止推楔块或制动衬片等。这些仅须以这样的方式连接到耦联装置210,即使得其可以通过致动元件221的运动被触发或致动。
60.总之,因此提供了一种节省空间的可能性,通过该可能性,例如可以从机器间并且因此也尤其电动地触发对重上的安全钳。
61.不言而喻,关于下部轿厢及其对重所说明的安全钳的触发或用于此目的的触发系统,也可以用在上部轿厢的对重上的安全钳,例如防止上部轿厢与井道天花板相撞。相应地,这也可以用于只有一个带有对重的轿厢的电梯设备中。
62.附图标记说明
63.100 电梯设备
64.110 井道
65.111 吊具
66.120 下部轿厢
67.121 上部轿厢
68.125 第一对重
69.126 第二对重
70.140 第一安全钳
71.141 第二安全钳
72.160 机器间
73.161 驱动器
74.162 驱动轮
75.164 底部
76.190 控制装置
77.200 触发系统
78.210 致动装置
79.211 杠杆臂
80.212 枢转点
81.213 第一弹簧元件
82.214 电磁体
83.220 耦联装置
84.221 致动元件
85.222 第二弹簧元件
86.223 引导元件
87.224 引导元件
88.230 第三安全钳
89.231 楔块
90.232 杠杆臂系统
91.240 张紧质量块
92.241 张紧装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1