输送系统以及保管部的制作方法
1.本发明涉及输送系统以及保管部。
背景技术:
2.在半导体制造工厂等制造工厂中,例如使用通过行驶车输送收纳半导体晶圆或者标线片的输送容器(foup、、标线片pod)等物品的输送系统。作为该输送系统,公知有保持物品的行驶车沿着敷设于天花板的轨道行驶的系统。为了使行驶车的行驶路径多样化,提出了将轨道配置为网格状而使行驶车纵横地行驶的结构。
3.在使行驶车纵横地行驶的输送系统中,在将行驶车的主体部配置于轨道的上方,在主体部设置收纳物品的收纳部的结构中,在相对于轨道的下方的规定位置交接物品的情况下,需要在没有轨道的位置或者轨道与轨道之间通过并使物品升降,所以物品的交接位置受限。因此,提出了一种在轨道的下侧保持物品的状态下,行驶车能够沿着网格状的轨道纵横地行驶的输送系统(参照专利文献1)。
4.如专利文献1的输送系统那样,在行驶车在轨道的下侧保持物品的状态下行驶的系统中,行驶车轮配置于轨道的上方,另一方面,物品的收纳部以及行驶车的主体部配置于轨道的下方。因此,成为连结行驶车轮与收纳部(或者主体部)的连结部件跨越轨道的上下而设置的结构。在将该结构在网格状的轨道中实现的情况下,在轨道的交叉部需要用于允许连结部件的通过的间隙(窄缝)。在专利文献1的输送系统中,在轨道的交叉部设置有间隙,具有通过间隙截断交叉部的轨道的连接轨道。
5.专利文献1:国际公开第2018/037762号
6.为了维护上述那样的主体部等从网格状轨道垂下的行驶车,需要使用高空作业车等。在上述输送系统中,以提高输送效率等为目的,往往设置能够载置并保管多个物品的保管部。例如,为了有效地利用空间,保管部从网格状轨道垂下而设置于高处。在需要维护位于设置在高处的保管部的内侧的区域的行驶车、轨道等的情况下,由于存在构成保管部的框架等构造,所以无法带入高空作业车。为了将高空作业车带入上述保管部,需要取下框架等的作业,需要劳力和时间。每次带入高空作业车时取下框架是繁琐的。
技术实现要素:
7.本发明的目的在于提供一种在从网格状轨道垂下地设置的物品的保管部中,作业者能够容易到达高架输送车、网格状轨道以及物品等并进行维护的输送系统。
8.本发明的实施方式的输送系统具备:网格状轨道,其具有沿第一方向延伸的多个第一轨道、以及沿着与第一方向不同的第二方向延伸并与第一轨道交叉的多个第二轨道,通过多个第一轨道和多个第二轨道形成多个格子;高架输送车,其沿着网格状轨道行驶;吊挂部件,其悬挂在网格状轨道;以及框架,其在俯视时至少包围一个格子,并设置于吊挂部件的下部,在框架的格子的下方设置通过高架输送车载置物品的载置部、以及成为作业者能够步行的通路的脚手架部。
9.另外,也可以是框架形成为在俯视时包围多个格子,脚手架部在俯视时以横跨多个格子的方式形成于框架的内侧的结构。另外,也可以是高架输送车在主体部从网格状轨道垂下的状态下行驶,吊挂部件从网格状轨道的、第一轨道与第二轨道的交叉部垂下而设置的结构。另外,也可以是在脚手架部的两侧设置载置部的结构。另外,也可以是脚手架部在俯视时以横跨多个格子的方式纵横地形成的结构。另外,也可以是脚手架部在俯视时从框架的外缘设置到中央部的结构。另外,也可以是框架是相互邻接地配置多个的框架单体的集合体,相邻的框架单体彼此的脚手架部形成为相互邻接的结构。另外,也可以是在框架单体具备多个载置部,该多个载置部的数量比在俯视时框架单体包围的格子的数量多的结构。另外,也可以是多个载置部在俯视时靠近框架单体的规定区域而集中设置,脚手架部设置于框架单体的规定区域以外的区域的结构。
10.另外,也可以是框架单体作为脚手架部,具备将水平方向上的第一方向作为长边状的第一脚手架部、以及将第二方向作为长边状的第二脚手架部的结构。另外,也可以是第一脚手架部的通路宽度比载置部的第二方向的长度短,第二脚手架部的通路宽度比载置部的第一方向的长度短的结构。另外,也可以是第一脚手架部以及第二脚手架部的两端部分别延伸设置到框架的外缘附近的结构。
11.本发明的实施方式的保管部是在输送系统中用于物品的保管的保管部,所述输送系统具备网格状轨道以及沿着网格状轨道行驶的高架输送车,所述网格状轨道具有沿第一方向延伸的多个第一轨道、和沿与第一方向不同的第二方向延伸并与第一轨道交叉的多个第二轨道,通过多个第一轨道与多个第二轨道形成多个格子,所述保管部具备:吊挂部件,其悬挂于网格状轨道;以及框架,其在俯视时至少包围一个格子,并设置于吊挂部件的下部,在框架的格子的下方设置通过高架输送车载置物品的载置部、以及成为作业者能够步行的通路的脚手架部。
12.根据上述实施方式的输送系统以及保管部,在从网格状轨道垂下地设置的物品的保管部中,作业者能够容易地到达高架输送车、网格状轨道以及物品等并进行维护。
13.另外,在框架形成为在俯视时包围多个格子,脚手架部在俯视时以横跨多个格子的方式设置于框架的内侧的结构中,能够进一步扩大通过高架输送车载置物品的保管部的空间,且作业者能够到达框架的内侧的区域。另外,在高架输送车在主体部从网格状轨道垂下的状态下行驶,吊挂部件从网格状轨道的、第一轨道与第二轨道的交叉部垂下地设置的结构中,能够配置吊挂部件并设置框架而不妨碍高架输送车的行驶。另外,在脚手架部的两侧设置载置部的结构中,作业者能够容易地从脚手架部维护载置部。另外,在脚手架部在俯视时以横跨多个格子的方式纵横地形成的结构中,作业者能够使用脚手架部容易地到达网格状轨道的各部。另外,在脚手架部在俯视时从框架的外缘开始设置到中央部的结构中,作业者能够使用脚手架部容易地到达框架的中央部。另外,在框架是相互邻接地配置多个的框架单体的集合体,相邻的框架单体彼此的脚手架部形成为相互邻接的结构中,框架作为多个框架单体的集合体而形成,所以能够确保框架的刚性。另外,由于多个框架单体相互邻接地配置,所以能够高密度设置框架单体。另外,由于框架单体彼此的脚手架部形成为相互邻接,所以作业者能够容易地换乘到相邻的框架单体的脚手架部。另外,在在框架单体的内侧具备多个载置部,该多个载置部的数量比在俯视时框架单体包围的格子的数量多的结构中,能够高密度地设置载置部。另外,在多个载置部在俯视时靠近框架单体的内侧的规定区
域而集中设置,脚手架部设置于框架的内侧的规定区域以外的区域的结构中,能够高密度地设置载置部,且能够确保用于设置脚手架部的集中区域。
14.另外,在框架单体作为脚手架部,具备以水平方向中的第一方向为长边状的第一脚手架部、以及以与第一方向正交的水平方向中的第二方向为长边状的第二脚手架部的结构中,与将脚手架部仅形成在一个方向的结构相比,能够在两个方向形成脚手架部,所以能够在框架的内侧有效地形成脚手架部。另外,在第一脚手架部的通路宽度比载置部的第二方向的长度短,第二脚手架部的通路宽度比载置部的第一方向的长度短的结构中,在框架的内侧,能够将无法设置载置部的长边状的空间活用为脚手架部。另外,在第一脚手架部以及第二脚手架部的两端部分别延伸设置到框架的外缘附近的结构中,能够容易地从框架的外部到达框架的内部的脚手架部。
附图说明
15.图1是表示第一实施方式的输送系统的一个例子的立体图。
16.图2是表示高架输送车的一个例子的立体图。
17.图3是表示高架输送车的一个例子的侧视图。
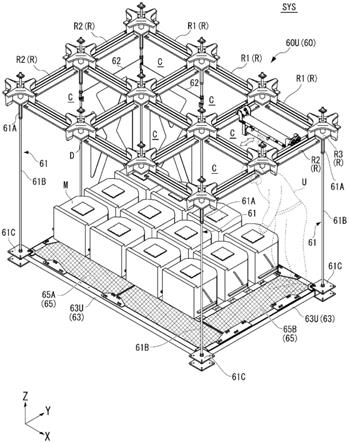
18.图4是表示保管部的一个例子的立体图。
19.图5是表示保管部的一个例子的俯视图。
20.图6是表示网格状轨道与吊挂部件的连接部分的侧视图。
21.图7是表示吊挂部件与框架的连接部分的立体图。
22.图8是表示连结部件62的一个例子的侧视图。
23.图9的(a)以及(b)是表示连结部件与吊挂部件的连接部分的立体图。
24.图10是表示第二实施方式的输送系统的一个例子的俯视图。
25.图11是表示第二实施方式的输送系统的一个例子的立体图。
26.图12是表示保管部的其它例子的俯视图。
27.图13是表示保管部的其它例子的俯视图。
28.图14是表示保管部的其它例子的立体图。
29.图15是表示保管部的其它例子的立体图。
30.图16是表示保管部的其它例子的立体图。
具体实施方式
31.以下,参照附图来说明本发明的实施方式。但是,本发明并不限于以下说明的形态。另外,在附图中,为了说明实施方式,放大或者强调记载一部分等适当地改变比例尺来表现。在以下的各图中,使用xyz坐标系来说明图中的方向。在该xyz坐标系中,将与水平面平行的平面设为xy平面。将沿着该xy平面的一个方向标记为x方向,将与x方向正交的方向标记为y方向。此外,高架输送车100的行驶方向能够从以下的图所示的状态向其它方向变化,例如也存在沿曲线方向行驶的情况。另外,将与xy平面垂直的方向标记为z方向。x方向、y方向以及z方向的各个以图中的箭头所指的方向是+方向,与箭头所指的方向相反的方向是-方向来进行说明。另外,将绕垂直轴或者绕z轴的旋转方向标记为θz方向。
32.[第一实施方式]
[0033]
图1是表示第一实施方式的输送系统sys的一个例子的侧视图。此外,在图1中箭头所表示的图是放大了交叉部r3的图。图2是在图1所示的输送系统sys中使用的高架输送车100的立体图。图3是表示本实施方式的高架输送车100的一个例子的侧视图。如图1所示,高架输送车100沿着输送系统sys的轨道r移动,输送收纳半导体晶圆的foup、或者收纳标线片的标线片pod等物品m。
[0034]
输送系统sys例如是在半导体制造工厂的洁净室中,用于通过高架输送车100输送物品m的系统。在输送系统sys中,高架输送车100例如也可以使用多台。通过多个高架输送车100输送物品m,由此能够进行高密度的输送,能够提高物品m的输送效率。
[0035]
轨道r是轨道的一个形态。轨道r敷设在洁净室等建筑物的天花板或者天花板附近。轨道r是具有多个第一轨道r1、多个第二轨道r2以及多个交叉部r3的网格状轨道。以下,将轨道r称为网格状轨道r。多个第一轨道r1分别沿着x方向(第一方向d1)延伸。多个第一轨道r1分别配置为y方向(第二方向d2)的第一轨道r1彼此的间隔ga1(轨距)大致恒定。多个第二轨道r2分别沿着与第一方向d1不同的第二方向d2延伸。多个第二轨道r2分别配置为x方向(第一方向d1)的第二轨道r2彼此的间隔ga2(轨距)大致恒定。多个第二轨道r2分别与第一轨道r1交叉。网格状轨道r通过多个第一轨道r1与多个第二轨道r2,在俯视时被形成为网格状。网格状轨道r通过多个第一轨道r1与多个第二轨道r2形成多个格子c。在本实施方式中,第一方向d1与第二方向d2正交,沿着相互正交的方向设置多个第一轨道r1和多个第二轨道r2,但也可以设置为相互不直接交叉。交叉部r3配置于第一轨道r1与第二轨道r2的交叉部分。交叉部r3在第一方向d1上与第一轨道r1相邻并且在第二方向d2上与第二轨道r2相邻。交叉部r3是进行第一轨道r1与第二轨道r2的连接、第一轨道r1彼此的连接、第二轨道r2彼此的连接的连接轨道。交叉部r3是在高架输送车100沿着第一轨道r1行驶时、高架输送车100沿着第二轨道r2行驶时、高架输送车100从第一轨道r1向第二轨道r2行驶时、以及从第二轨道r2向第一轨道r1行驶时的任意一种情况下使用的轨道。交叉部r3在从+z方向观察时(在俯视时),由矩形的板状的部件形成,分别设定在矩形的板状的部件的四个角部(角部)(图1所示的阴影部分)。对于网格状轨道r,将多个第一轨道r1与多个第二轨道r2设置于正交的方向,从而在俯视时成为多个格子c(网格单元、单元)相邻的状态。一个格子c如图1所示,在俯视时,是被在第二方向d2上相邻的两个第一轨道r1、和在第一方向d1上相邻的两个第二轨道r2围起的部分。此外,在图1中示出了网格状轨道r的一部分,网格状轨道r基于图示出的结构,在第一方向d1(x方向)以及第二方向d2(y方向)上连续形成有相同的结构。
[0036]
第一轨道r1、第二轨道r2以及交叉部r3通过悬挂部件h(参照图1)而被悬挂在未图示的天花板上。悬挂部件h具有用于悬挂第一轨道r1的第一部分h1、用于悬挂第二轨道r2的第二部分h2、以及用于悬挂交叉部r3的第三部分h3。第一部分h1以及第二部分h2分别设置于夹着第三部分h3的两个地方。
[0037]
第一轨道r1、第二轨道r2以及交叉部r3分别具有高架输送车100的后述的行驶车轮21行驶的行驶面r1a、r2a、r3a。在一个第一轨道r1上,在第二方向d2上排列设置有两个沿着第一方向d1的行驶面r1a。在一个第二轨道r2上,在第一方向d1上排列设置有两个沿着第二方向d2的行驶面r2a。在高架输送车100沿第一方向d1行驶时,行驶车轮21在第二方向d2上邻接配置的一对第一轨道r1的行驶面r1a上行驶。在高架输送车100沿第二方向d2行驶时,行驶车轮21在第一方向d1上邻接配置的一对第二轨道r2的行驶面r2a上行驶。邻接配置
的一对第一轨道r1的轨距ga1、以及邻接配置的一对第二轨道r2的轨距ga2设定为大致相同。在第一轨道r1与交叉部r3之间形成第一间隙gp1。另外,在第二轨道r2与交叉部r3之间形成第二间隙gp2。第一间隙gp1是在高架输送车100在第二轨道r2上行驶并横穿第一轨道r1时,高架输送车100的一部分亦即后述的连结部30通过的部分。第二间隙gp2是在高架输送车100在第一轨道r1上行驶并横穿第二轨道r2时,高架输送车100的连结部30通过的部分。因此,第一间隙gp1以及第二间隙gp2(总称为间隙gp)分别设置为高架输送车100的连结部30能够通过的宽度。第一轨道r1、第二轨道r2以及交叉部r3沿着相同或者大致相同的水平面而设置。在本实施方式中,第一轨道r1、第二轨道r2以及交叉部r3的行驶面r1a、r2a、r3a配置于相同或者大致相同的水平面上。
[0038]
网格状轨道r具有第一引导面g1、和第二引导面g2。第一引导面g1沿着第一轨道r1而设置。在本实施方式中,第一引导面g1设置于第一轨道r1的侧面。第二引导面g2沿着第二轨道而设置。在本实施方式中,第二引导面g2设置于第二轨道r2的侧面。
[0039]
另外,交叉部r3具有第一连接引导面g3a、第二连接引导面g3b以及连续面g3c。在本实施方式中,第一连接引导面g3a设置在与第一引导面g1相同的高度(包含大致相同的高度。)并且相同的方向上(包含大致相同的方向。)。即、第一连接引导面g3a与第一引导面g1被包含于相同的平面。第二连接引导面g3b设置在与第二引导面g2相同的高度(包含大致相同的高度。)并且相同的方向上(包含大致相同的方向。)。即、第二连接引导面g3b与第二引导面g2被包含于相同的平面。连续面g3c形成为将第一连接引导面g3a与第二连接引导面g3b连续。连续面g3c是平滑地连接第一连接引导面g3a与第二连接引导面g3b的曲面。
[0040]
如图2以及图3所示,高架输送车100具有主体部10、行驶部20、连结部30以及控制部50(参照图3)。控制部50统一控制高架输送车100的各部的动作。控制部50虽设置于主体部10,但也可以设置于主体部10的外部。主体部10配置于网格状轨道r的下方(-z侧)。高架输送车100以主体部10从网格状轨道r垂下的状态进行行驶。主体部10在俯视中例如形成为矩形。主体部10形成为在俯视中被收纳于网格状轨道r的一个格子c(参照图1)的尺寸。因此,确保与在相邻的第一轨道r1或者第二轨道r2上行驶的其它高架输送车100会车的空间。主体部10具备上部单元17和移载装置18。上部单元17经由连结部30而从行驶部20悬吊下来。上部单元17例如在俯视时是矩形,在上表面17a具有四个角部。
[0041]
主体部10在四个角部的各个具有行驶车轮21、连结部30、方向转换机构34。在该结构中,能够利用配置于主体部10的四个角部的行驶车轮21,稳定地悬挂主体部10,并且能够使主体部10稳定地行驶。
[0042]
移载装置18设置于上部单元17的下方。移载装置18能够绕z方向(铅垂方向)的旋转轴ax1旋转。移载装置18具有:保持物品m的物品保持部13、使物品保持部13沿铅垂方向升降的升降驱动部14、使升降驱动部14沿水平方向滑动移动的横向伸出机构11、以及保持横向伸出机构11的转动部12。物品保持部13通过把持物品m的凸缘部ma,悬挂地保持物品m。物品保持部13例如是具有能够沿水平方向移动的爪部13a的卡盘,使爪部13a进入物品m的凸缘部ma的下方,并使物品保持部13上升,从而保持物品m。物品保持部13与钢丝或者皮带等悬挂部件13b连接。
[0043]
升降驱动部14例如是升降机,通过放出悬挂部件13b而使物品保持部13下降,通过卷绕悬挂部件13b而使物品保持部13上升。升降驱动部14由控制部50控制,以规定的速度使
物品保持部13下降或者上升。另外,升降驱动部14被控制部50控制,将物品保持部13保持在目标的高度。
[0044]
横向伸出机构11例如具有在z方向上重叠配置的多个可动板。可动板能够沿x方向相对移动。在最下层的可动板安装有升降驱动部14。横向伸出机构11能够利用未图示的驱动装置使可动板移动,使安装于最下层的可动板的升降驱动部14以及物品保持部13例如向与高架输送车100的行驶方向正交的水平方向横向伸出(滑动移动)。
[0045]
转动部12设置于横向伸出机构11与上部单元17之间。转动部12具有转动部件12a和转动驱动部12b。转动部件12a设置为能够绕铅垂方向的轴方向转动。转动部件12a支承横向伸出机构11。转动驱动部12b例如使用电动马达等,使转动部件12a绕旋转轴ax1的轴方向转动。转动部12能够通过来自转动驱动部12b的驱动力使转动部件12a转动,使横向伸出机构11(升降驱动部14以及物品保持部13)绕旋转轴ax1的轴方向旋转。
[0046]
另外,如图2所示,也可以以包围移载装置18以及保持于移载装置18的物品m的方式设置有罩w。罩w是使下端开放的筒状,并且具有将横向伸出机构11的可动板突出的部分切口的形状。罩w的上端安装于转动部12的转动部件12a,伴随着转动部件12a的转动而绕旋转轴ax1的轴转动。
[0047]
行驶部20具有行驶车轮21和辅助车轮22。行驶车轮21分别配置于上部单元17(主体部10)的上表面17a的四个角部。行驶车轮21的各个安装于设置在连结部30的车轴。车轴沿着xy平面平行或者大致平行地设置。行驶车轮21的各个由后述的行驶驱动部33的驱动力旋转驱动。行驶车轮21的各个在轨道r中,在第一轨道r1、第二轨道r2以及交叉部r3的行驶面r1a、r2a、r3a上滚动,使高架输送车100行驶。此外,并不限于四个行驶车轮21的全部由行驶驱动部33的驱动力旋转驱动的情况,也可以是对四个行驶车轮21中的一部分进行旋转驱动的结构。
[0048]
行驶车轮21设置为能够以旋转轴ax2为中心向θz方向旋转。高架输送车100能够通过后述的方向转换机构34使行驶车轮21向θz方向旋转,来改变行驶方向。辅助车轮22在行驶车轮21的行驶方向的前后分别各配置有一个。辅助车轮22的各个与行驶车轮21相同,能够绕沿着xy平面平行或者大致平行的车轴的轴旋转。辅助车轮22的下端设定为比行驶车轮21的下端高。因此,在行驶车轮21在行驶面r1a、r2a、r3a使行驶时,辅助车轮22不与行驶面r1a、r2a、r3a接触。另外,在行驶车轮21通过间隙gp(参照图1)时,辅助车轮22与行驶面r1a、r2a、r3a接触,来抑制行驶车轮21的下落。此外,并不限于对一个行驶车轮21设置两个辅助车轮22的情况,例如也可以对一个行驶车轮21设置一个辅助车轮22,也可以不设置辅助车轮22。
[0049]
如图3所示,连结部30连结主体部10的上部单元17与行驶部20。连结部30分别设置于上部单元17(主体部10)的上表面17a的四个角部。通过该连结部30,主体部10成为从行驶部20悬吊的状态,配置于网格状轨道r的下方。连结部30具有支承部件31和连接部件32。支承部件31将行驶车轮21的旋转轴以及辅助车轮22的旋转轴支承为能够旋转。通过支承部件31保持行驶车轮21与辅助车轮22的相对位置。支承部件31例如形成为板状,形成为能够通过间隙gp(参照图1)的厚度。
[0050]
连接部件32从支承部件31向下方延伸而与上部单元17的上表面17a连结,保持上部单元17。连接部件32在内部具备将后述的行驶驱动部33的驱动力向行驶车轮21传递的传
递机构。该传递机构可以是使用链条或者皮带的结构,也可以是使用齿轮系的结构。连接部件32设置为能够以旋转轴ax2为中心沿θz方向旋转。该连接部件32以旋转轴ax2为中心旋转,从而能够经由支承部件31使行驶车轮21绕旋转轴ax2向θz方向旋转。
[0051]
在连结部30(参照图2)设置有行驶驱动部33和方向转换机构34。行驶驱动部33安装于连接部件32。行驶驱动部33是驱动行驶车轮21的驱动源,例如使用电动马达等。四个行驶车轮21是分别由行驶驱动部33驱动的驱动轮。四个行驶车轮21被控制部50控制为成为相同或者大致相同的转速。此外,在没有将四个行驶车轮21中的任一个作为驱动轮使用的情况下,没有作为驱动轮使用的行驶车轮21的连接部件32没有被安装于行驶驱动部33。
[0052]
方向转换机构34使连结部30的连接部件32以旋转轴ax2为中心旋转,由此使行驶车轮21绕旋转轴ax2向θz方向旋转。使行驶车轮21向θz方向旋转,由此能够从将高架输送车100的行驶方向作为第一方向d1的第一状态切换为将行驶方向作为第二方向d2的第二状态,或者从将行驶方向作为第二方向d2的第二状态切换为将行驶方向作为第一方向d1的第一状态。
[0053]
方向转换机构34具有驱动源35、小齿轮36以及齿条37。驱动源35在行驶驱动部33中安装在远离旋转轴ax2的侧面。驱动源35例如使用电马达等。小齿轮36安装于驱动源35的下表面侧,通过由驱动源35产生的驱动力向θz方向旋转驱动。小齿轮36在俯视中是圆形,在外周的周向上具有多个齿。齿条37固定于上部单元17的上表面17a。齿条37分别设置于上部单元17的上表面17a的四个角部,设置为以行驶车轮21的旋转轴ax2为中心的圆弧状(扇形状)。齿条37在外周的周向上,具有与小齿轮36的齿啮合的多个齿。
[0054]
小齿轮36以及齿条37以相互的齿啮合的状态而被配置。小齿轮36向θz方向旋转,由此小齿轮36以沿着齿条37的外周的方式向以旋转轴ax2为中心的圆周方向移动。通过该小齿轮36的移动,连接部件32旋转,行驶驱动部33以及方向转换机构34与小齿轮36一起向以旋转轴ax2为中心的圆周方向旋转。
[0055]
利用方向转换机构34的旋转,配置于上表面17a的四个角部的行驶车轮21以及辅助车轮22的各个以旋转轴ax2为中心向θz方向在90度的范围内旋转。方向转换机构34的驱动被控制部50控制。控制部50可以以在相同的时刻进行四个行驶车轮21的旋转动作的方式发出指示,也可以以在不同的时刻进行的方式发出指示。使行驶车轮21以及辅助车轮22旋转,由此行驶车轮21从与第一轨道r1以及第二轨道r2的一方接触的状态转移至与另一方接触的状态。换言之,从将行驶车轮21的旋转轴的方向设为第一方向d1以及第二方向d2的一方的状态转移至将其设为另一方的状态。因此,能够在将高架输送车100的行驶方向作为第一方向d1(x方向)的第一状态、与将行驶方向作为第二方向d2(y方向)的第二状态之间进行切换。
[0056]
图4是表示第一实施方式的保管部60的一个例子的立体图。图5是表示保管部的一个例子的俯视图。输送系统sys具备保管物品m的保管部60。保管部60是开销缓冲器(ohb)。保管部60设置于网格状轨道r的下方。在本实施方式中,以保管部60是作为一个单体的保管单元60u的例子为中心进行说明。保管单元60u(保管部60)具备吊挂部件61、连结部件62、框架单体63u(框架63)、载置物品m的载置部64(参照图5)以及脚手架部65。载置部64以及脚手架部65设置于框架单体63u(框架63)的格子c的下方。保管单元60u能够在网格状轨道r的下方的任意位置设置一个以上。保管单元60u能够相对于网格状轨道r装卸。
[0057]
保管单元60u形成为在俯视时至少包围一个格子c。保管单元60u的外周的形状设定为在俯视时与网格状轨道r的多个格子c的外周的形状大致一致。根据该结构,能够设置保管单元60u而不阻碍高架输送车100的行驶。保管单元60u的形状以及大小在图示的结构例中,设定为在俯视时与将x方向的格子c的数量设为3,将y方向的格子c的数量设为2的3
×
2个格子c的外周的形状以及大小大致一致。此外,保管单元60u的形状是任意的,并不限于上述结构例。例如,保管单元60u也可以设定为在俯视时,与x方向的格子c的数量是m(m是1以上的整数),y方向的格子c的数量是n(n是1以上的整数)的m
×
n的格子c的外周的形状以及大小大致一致。此外,关于保管单元60u的形状的其它例子将在后面进行说明。
[0058]
保管单元60u通过多个吊挂部件61从网格状轨道r悬挂而设置。各吊挂部件61具备连接部61a、棒状部61b以及固定部61c(参照图4)。各吊挂部件61是相同的结构。图6是表示从-y方向观察网格状轨道r与吊挂部件61的连接部分的侧视图。图7是表示吊挂部件61与框架的连接部分的立体图。吊挂部件61从交叉部r3垂下地设置(参照图6)。吊挂部件61设置于在高架输送车100行驶时不与高架输送车100干涉的位置。连接部61a与设置于交叉部r3的下方的连接部件59连接。连接部件59在俯视时设置于交叉部r3的中心部,连接部61a在俯视时与交叉部r3的中心部连接。连接部61a和交叉部r3具有螺栓以及螺母等机构,构成为能够装卸。
[0059]
棒状部61b是笔直延伸的棒状的部件。棒状部61b沿着铅垂方向而配置。棒状部61b的上端与连接部61a的下端连接。连接部61a和棒状部61b具有螺栓以及螺母等机构,构成为能够装卸。
[0060]
在棒状部61b的下端设置有固定部61c(参照图7)。固定部61c固定框架单体63u。固定部61c具有两个板状部件61d和紧固部件61f。固定部61c通过两个板状部件61d,经由夹装部件61e从上下夹住框架单体63u并通过紧固部件61f固定。两个板状部件61d固定于棒状部61b。能够将四个框架单体63u各自的一个角(角)部63a固定在一个固定部61c。根据该结构,能够通过一个吊挂部件61最多安装四个保管单元60u的框架单体63u,所以能够高密度地邻接设置多个保管单元60u。固定部61c与棒状部61b构成为能够装卸。固定部61c与框架单体63u构成为能够装卸。吊挂部件61通过上述结构,在悬挂于交叉部r3的状态下支承框架单体63u。另外,吊挂部件61以及框架单体63u通过上述结构,能够相对于交叉部r3装卸。
[0061]
如上述那样,在从交叉部r3垂下地设置吊挂部件61的结构的情况下,能够使吊挂部件61不妨碍高架输送车100的行驶而配置吊挂部件61,并设置保管单元60u。在本实施方式中,高架输送车100构成为能够在吊挂部件61与吊挂部件61之间通过。此外,吊挂部件61并不限于上述结构,也可以是其它结构。例如,吊挂部件61也可以是与第一轨道r1或者第二轨道r2连接的结构。
[0062]
吊挂部件61的位置以及数量根据框架单体63u、载置部64等保管单元60u的各部的形状、大小、重量等结构而适当地设定。在图示的结构例中,吊挂部件61设置为均衡地支承框架单体63u。吊挂部件61在俯视时,在形成保管单元60u的外周的部分等设置多个。吊挂部件61在俯视时,设置在相当于保管单元60u的外周部分的矩形各自的角部等,且在俯视时,相对于保管单元60u的中心旋转对称地配置。此外,吊挂部件61的位置并不限于上述例子,例如也可以在俯视时设置于保管单元60u的内侧的部分。
[0063]
图8是表示连结部件62的一个例子的图。图8是从-y侧观察连结部件62时的图。连
结部件62连结相邻的吊挂部件61彼此。连结相邻的吊挂部件61彼此,由此能够限制吊挂部件61的移动,能够抑制保管单元60u的摇晃。连结部件62的形状在图示的结构例中,是具有多个窗部62a的矩形板状。在该结构的情况下,能够确保连结部件62的强度并能够抑制重量,另外,能够通过窗部62a,抑制由连结部件62的遮挡导致的可视性的恶化。此外,高架输送车100虽不能通过连结部件62,但能够向在与连结部件62邻接的各格子c移动。
[0064]
连结部件62构成为能够相对于吊挂部件61的棒状部61b装卸。连结部件62具有与棒状部61b连接的连接部62b。在图示的结构例中,连接部62b设置于连结部件62的四角。
[0065]
图9的(a)以及(b)是表示连结部件62与吊挂部件61的连接部分的立体图。图9的(a)是从-y侧观察时的立体图,图9的(b)是从+y侧观察时的立体图。在图9的(a)以及(b)中,示出了将图8所示的四个连结部件62中的配置于+z侧且+x侧的连结部件62放大而从两个方向观察的图。
[0066]
连接部62b与吊挂部件61的棒状部61b的一部分连接。连接部62b以包围棒状部61b的外周部的方式与棒状部61b连接。连接部62b还能够从棒状部61b取下。连接部62b利用螺栓等固定部件62c从上下进行螺纹固定,由此固定于棒状部61b,连结部件62的上下方向的位置被固定。根据上述连结部件62的结构,能够容易地设置连结部件62。
[0067]
此外,连结部件62的结构只要是能够连结吊挂部件61彼此的结构,就不限于上述结构。另外,连结部件62可以是任意结构,也可以没有连结部件62。
[0068]
框架单体63u是框架63。框架单体63u是在一个保管单元60u的结构中使用的框架。框架单体63u配置于保管单元60u的下方的位置(参照图4)。框架单体63u通过吊挂部件61,而从网格状轨道r悬挂地设置。框架单体63u如上述那样,通过多个吊挂部件61而被悬挂。框架单体63u设置于吊挂部件61的下部。框架单体63u配置于比行驶时的高架输送车100的位置(图3所示的实线的位置)靠下方。框架单体63u成为支承保管单元60u的各部分的基座。框架单体63u配置在沿着水平的方向上。框架单体63u由多个部件构成。
[0069]
框架单体63u形成为在俯视时至少包围一个格子c。框架单体63u形成为俯视时包围多个格子c。在本实施方式的框架单体63u中,在俯视时,包围将x方向的格子c的数量设为3,将y方向的格子c的数量设为2的3
×
2的合计六个格子c。框架单体63u的外周设定为在俯视时与多个格子c(在本实施方式中是六个)的外周大致一致。根据该结构,能够设置保管单元60u而不阻碍高架输送车100的行驶。
[0070]
框架单体63u在俯视时,至少配置于形成保管单元60u的外周的部分。在图示的结构例中,框架单体63u在俯视时,至少配置于形成保管单元60u的外周的矩形的4边的部分。此外,框架单体63u的结构并不限于上述结构例。例如,框架单体63u的外周也可以在俯视时不是矩形。
[0071]
对载置部64(参照图4、图5)进行说明。保管单元60u具备多个能够载置一个物品m的载置部64。通过高架输送车100将物品m载置在各载置部64。各载置部64设置于框架单体63u的内侧。框架单体63u的内侧是俯视图中的框架单体63u的内侧的区域。一个载置部64在俯视时,设定为与物品m的外周相同的大小。
[0072]
多个载置部64在图5的结构例中,由水平地配置且以相互平行的位置关系配置的多个棒状部件64a等形成。各棒状部件64a固定于框架单体63u。棒状部件64a也作为框架单体63u的梁发挥功能。各棒状部件64a的上表面是平面状,成为载置物品m的载置面。一个物
品m由两个棒状部件64a从下方支承。各物品m的从中心向+y方向偏移的部分以及向-y方向偏移的部分由两个棒状部件64a从下方支承,由此将各物品m载置于载置部64。两个棒状部件64a在图示的结构例中,沿着x方向配置于相互平行的位置。在载置部64由上述棒状部件64a构成的情况下,与将物品m载置于板状的部件的结构相比,能够抑制保管单元60u的重量,且能够抑制洁净室等所使用的垂直层流(下降流)的流动被阻断的情况。
[0073]
在各棒状部件64a的上表面设置有能够定位物品m的活动销等定位机构(未图示)。定位机构以一个载置部64为单位而设置。各载置部64能够通过定位机构对物品m进行定位并载置。
[0074]
载置部64设定得比在俯视时框架单体63u包围(收纳于内侧)的多个格子c的数量多。在图示的结构例中,载置部64的数量是x方向为四列、y方向为三列的4
×
3的合计12。在图示的结构例中,多个载置部64在框架单体63u的内侧的区域中设置了能够设置的最大数量。在该结构的情况下,能够高密度地设置载置部64。
[0075]
在相邻的载置部64相互之间设置有规定的间隔。该间隔是在通过高架输送车100将物品m向载置部64输送时,以物品m不碰撞的方式设置的间隔。多个载置部64在俯视时靠近框架单体63u的内侧的规定的区域ar1而集中设置。区域ar1是一个连续的区域。区域ar1在本实施方式的结构例中,在俯视时设定为矩形。在多个载置部64靠近规定的区域ar1而集中设置的结构的情况下,能够高密度地设置载置部64,且能够确保用于设置脚手架部65的集中区域。在本实施方式的结构例中,区域ar1在俯视时,配置于沿着框架单体63u的外周的角部分。在该结构的情况下,能够相对于载置部64以及脚手架部65有效地利用框架单体63u的内侧的空间。
[0076]
载置部64在俯视时的大小由物品m的形状设定,以包含最大数量的载置部64的方式集中设置多个载置部64的区域ar1。另外,在俯视时,构成为高架输送车100被收纳于网格状轨道r的一个格子c内。此外,即使在俯视时的一个载置部64的中心与格子c的中心偏移地配置的情况下,也能够利用高架输送车100的横向伸出机构11将物品m载置于各载置部64。这样,本实施方式的多个载置部64被高密度地配置而与网格状轨道r的格子c无关。
[0077]
此外,载置部64的结构只要能够载置物品m,就不限于上述结构例。例如,区域ar的大小以及形状分别是任意的。另外,载置部64并不限于由棒状部件64a构成的结构,例如,也可以由板状的部件构成。关于载置部64的其它结构将在后面进行说明。
[0078]
对脚手架部65(参照图4、图5)进行说明。脚手架部65设置于框架单体63u的内侧。脚手架部65形成为在俯视时横跨多个格子c。脚手架部65是作业者u能够步行的通路。另外,脚手架部65作为作业者u的脚手架而被使用。脚手架部65例如用作作业者u对输送系统sys进行维护作业的脚手架。输送系统sys的维护例如是高架输送车100的维护、网格状轨道r的维护、保管单元60u本身的维护等。脚手架部65构成为能够支承作业者u。脚手架部65的耐受载荷至少是人的重量以上。脚手架部65例如是格栅、冲孔金属等那样的具有多个孔的部件。脚手架部65固定于框架单体63u以及棒状部件64a。在脚手架部65是上述具有多个孔的部件的情况下,与板状部件相比,能够抑制重量,并且能够抑制在洁净室等中使用的垂直层流(下降流)的流动被阻断的情况。
[0079]
脚手架部65设置于多个载置部64的区域ar1以外的区域。脚手架部65配置于作业者u在脚手架部65中能够到达框架单体63u的内侧的高架输送车100、网格状轨道r以及多个
载置部64等的位置。本实施方式的保管单元60u形成为在脚手架部65中,作业者u的手到达框架单体63u的内侧的高架输送车100、网格状轨道r以及多个载置部64等。脚手架部65具备第一脚手架部65a和第二脚手架部65b(参照图5)。第一脚手架部65a以水平方向上的第一方向d1(x方向)为长边状。第二脚手架部65b以与第一方向d1正交的水平方向上的第二方向d2(y方向)为长边状。另外,在本实施方式中,第一脚手架部65a与第二脚手架部65b在俯视时配置为l字形。如上述那样,在框架单体63u(框架63)作为脚手架部65具备以第一方向为长边状的第一脚手架部65a、和以第二方向为长边状的第二脚手架部65b的结构的情况下,由于脚手架部65形成在两个方向上,所以与仅在一个方向上形成脚手架部65的结构相比,能够在框架单体63u的内侧有效地形成脚手架部65。
[0080]
在第一方向d1上,第二脚手架部65b的尺寸l1(通路宽度)设定为小于一个载置部64(区域ar1)的长度(尺寸)l2,在第二方向d2上,第一脚手架部65a的尺寸l3(通路宽度)设定为小于一个载置部64(区域ar1)的长度(尺寸)l4(参照图5)。在第一脚手架部65a的通路宽度l1比载置部64的第二方向d2的长度l2短,第二脚手架部65b的通路宽度l3比载置部的第一方向d1的长度l4短的结构中,在框架单体63u的内侧,能够将无法设置载置部64的长边状的空间作为脚手架部65有效地利用。在本实施方式中,脚手架部65在框架单体63u的内侧,如上述那样设置在能够设置最大数的多个载置部64的区域ar1以外的区域。在该结构的情况下,能够高密度地设置载置部64,并且能够有效地确保脚手架部65的空间。
[0081]
第一脚手架部65a和第二脚手架部65b相互的一部分连接或者接近地配置。在该结构的情况下,作业者u能够容易地进行第一脚手架部65a与第二脚手架部65b的移动。第一脚手架部65a以及第二脚手架部65b的一方或者双方的端部延伸设置到框架单体63u的外缘附近。在本实施方式中,第一脚手架部65a以及第二脚手架部65b双方各自的两端部延伸设置到框架单体63u的外缘附近。在第一脚手架部65a以及第二脚手架部65b的一方或者双方的端部延伸设置到框架单体63u的外缘附近的结构中,能够容易地从框架单体63u的外部到达框架单体63u的内部的脚手架部65。
[0082]
第一脚手架部65a以及第二脚手架部65b一方或者双方沿着框架单体63u而设置。在本实施方式中,第一脚手架部65a以及第二脚手架部65b双方沿着框架单体63u而设置。在第一脚手架部65a以及第二脚手架部65b一方或者双方沿着框架单体63u而设置的结构中,在沿着框架单体63u的强度高的部分配置脚手架部65,所以能够确保脚手架部65的强度。
[0083]
在本实施方式中,如上述那样,框架63形成为在俯视时包围多个格子c,脚手架部65以在俯视时横跨多个格子c的方式形成于框架63的内侧。在该结构中,能够进一步扩大通过高架输送车100载置物品m的保管部60的空间,并且作业者u能够到达框架63的内侧的区域。
[0084]
如以上的说明的那样,根据本实施方式的输送系统sys以及保管部60,由于保管部60具备脚手架部65,所以在保管部60中,作业者u能够容易到达高架输送车100、网格状轨道r以及物品m等并进行维护。
[0085]
[第二实施方式]
[0086]
对第二实施方式进行说明。在本实施方式中,对与上述实施方式相同的结构标注相同的附图标记并适当地省略或简化说明。另外,在本说明书的实施方式中说明的事项中的、可适用在本实施方式的结构也适当地适用于本实施方式。
[0087]
图10是表示从+z侧观察第二实施方式的输送系统sys2的一个例子时的俯视图。图11是表示第二实施方式的输送系统sys2的一个例子的立体图。在图11中,放大表示了输送系统sys2的一部分。输送系统sys2代替第一实施方式的输送系统sys的保管部60,而具备保管部60a。在输送系统sys2中,第一实施方式的保管部60(保管单元60u)以外的结构与第一实施方式的输送系统sys相同。图10所示的附图标记“ap”是处理装置。处理装置ap例如是曝光装置、涂布显影机、制膜装置、蚀刻装置等,对行驶车v输送的容器内的半导体晶圆实施各种处理。
[0088]
保管部60a具备多个保管单元60u。保管部60a具备分别在x方向以及y方向上配置多个的保管单元60u。各保管单元60u分别是与第一实施方式的保管单元60u相同的构造。在保管部60a具备相同结构的保管单元60u的结构的情况下,使用相同结构的保管单元60u,所以能够简化构成且能够抑制制造成本。各保管单元60u彼此邻接地配置。保管部60a的框架63是相互邻接地配置的框架单体63u的集合体。此外,在本说明书中,框架63是指保管部60、60a的框架整体。框架63在邻接的保管单元60u中,一个保管单元60u包围的x方向
×
y方向的3
×
2的多个格子c也设定为邻接。在多个保管单元60u中,悬挂邻接的部分的框架单体63u的吊挂部件61是共用的。在保管部60a具备邻接地配置的保管单元60u的结构的情况下,能够高密度地设置载置部64并且能够有效地确保脚手架部65的空间。
[0089]
在多个保管单元60u中,相邻的保管单元60u(框架单体63u)的脚手架部65彼此以作业者u能够换乘的方式接近配置。在该结构的情况下,作业者u能够容易地换乘到相邻的保管单元60u(框架单体63u)的脚手架部65。在保管部60a中,在脚手架部65的两侧(水平方向的脚手架部65的两侧)设置有多个载置部64。在脚手架部65的两侧设置载置部64的结构中,作业者u容易从脚手架部65维护载置部64。在保管部60a中,脚手架部65在俯视时均匀地配置。在保管部60a中,脚手架部65在俯视时从网格状轨道r的外缘开始设置到中央部。在该结构的情况下,作业者u能够使用脚手架部65容易地到达网格状轨道r的中央部。另外,在保管部60a中,脚手架部65在俯视时以横跨多个格子c的方式纵横地形成。在该结构的情况下,作业者u能够使用脚手架部65容易地到达网格状轨道r的各部。在本实施方式中,在保管部60a中,多个第一脚手架部65a沿着x方向(第一方向d1)配置,多个第二脚手架部65b沿着y方向(第二方向d2)配置。在保管部60a中,配置于相邻的保管单元60u且在第一方向d1上邻接地配置的第一脚手架部65a彼此,以及配置于相邻的保管单元60u且在第二方向d2上邻接地配置的第二脚手架部65b彼此分别大体配置在直线上。多个第一脚手架部65a在第一方向d1上,从框架63的端部延伸到对置侧的端部。多个第二脚手架部65b在第二方向d2上,从框架63的端部延伸到对置侧的端部。另外,多个第一脚手架部65a以及多个第二脚手架部65b)分别在x方向(第一方向d1)以及y方向(第二方向d2)上,以规定的间隔而配置。在保管部60a中,脚手架部65(多个第一脚手架部65a、多个第二脚手架部65b)包含在俯视时配置为网格状的结构。如上述那样,在脚手架部65在俯视时配置为网格状的结构中,作业者u能够容易地在通路上(脚手架部65上)移动,能够容易地到达框架63的内侧的区域的各部(俯视图中的网格状轨道的中央区域的各部)。
[0090]
在本实施方式的输送系统sys2中,各保管单元60u构成为作业者u在脚手架部65中,能够到达框架单体63u的内侧的高架输送车100以及多个载置部64。在该结构的情况下,即使在保管部60a的内部需要维护作业的情况下,作业者u也不需要卸下保管部60a的框架
等作业,如图11所示,能够容易地到达位于保管部60a的内侧的区域的高架输送车100以及多个载置部64。
[0091]
另外,在保管部60a中,脚手架部65延伸配置到保管部60a的外缘附近。在该结构的情况下,作业者u能够容易地从保管部60a的外部进入保管部60a的内部。
[0092]
另外,在本实施方式中,如上述那样,框架63是相互邻接配置多个的框架单体63u的集合体,相邻的框架单体63u彼此的脚手架部65形成为相互邻接。在该结构中,框架63作为多个框架单体63u的集合体而形成,所以能够确保框架的刚性。另外,由于多个框架单体63u相互邻接地配置,所以能够高密度设置框架单体63u。另外,框架单体63u彼此的脚手架部65形成为相互邻接,所以作业者u能够容易地换乘到相邻的框架单体63u的脚手架部65。
[0093]
如上所述,本实施方式的输送系统sys2具备相互邻接地配置的多个保管单元60u。根据该结构,能够高密度地设置载置部64而不妨碍高架输送车100的行驶,且在从网格状轨道r垂下地设置的物品m的保管部60a中,作业者u能够容易地到达保管部60a的内部的高架输送车100、网格状轨道r以及物品m等。
[0094]
如上所述,本发明的实施方式的输送系统sys、sys2具备:具有沿第一方向d1延伸的多个第一轨道r1、以及沿与第一方向d1不同的第二方向d2延伸的多个第二轨道r2,通过多个第一轨道r1与多个第二轨道r2形成多个格子c的网格状轨道r;沿着网格状轨道r行驶的高架输送车100;从网格状轨道r垂下地设置的吊挂部件61;在俯视时至少包围一个格子c,设置于吊挂部件61的下部的框架63;设置于框架63的内侧,通过高架输送车100载置物品m的载置部64;以及设置于框架63的内侧,成为作业者u能够步行的通路的脚手架部65。根据上述结构,在从网格状轨道r垂下地设置的物品m的保管部60、60a中,由于设置有脚手架部65,所以作业者u能够容易地到达高架输送车100、网格状轨道r以及物品m等并进行维护。此外,在输送系统sys、sys2中,上述以外的结构是任意的结构,上述以外的结构既可以存在也可以不存在。
[0095]
另外,本实施方式的保管部60、60a在上述输送系统sys、sys2中,是用于物品m的保管的保管部60、60a,具备悬挂在网格状轨道r的吊挂部件61;在俯视时至少包围一个格子,设置于吊挂部件61的下部的框架63;设置于框架63的内侧,通过高架输送车100载置物品m的载置部64;以及设置于框架63的内侧,成为作业者u能够步行的通路的脚手架部65。根据上述结构,在从网格状轨道r垂下地设置的物品m的保管部60、60a中,由于设置有脚手架部65,所以作业者u能够容易地到达高架输送车100、网格状轨道r以及物品m等并进行维护。此外,在保管部60、60a中,上述以外的结构是任意的结构,上述以外的结构既可以存在也可以不存在。
[0096]
此外,本发明的技术范围并不限于在上述实施方式等中说明的实施方式。有时省略在上述实施方式等中说明的要件的一个以上。另外,在上述实施方式等中说明的要件能够适当地组合。另外,在法律允许的范围内,援用作为日本专利申请的日本特愿2019-169526以及上述实施方式等中引用的所有文献的公开并作为正文记载的一部分。
[0097]
例如,并不限于一个保管单元60u的多个载置部64以及脚手架部65(第一脚手架部65a、第二脚手架部65b)的上述结构。图12以及图13是表示载置部64以及脚手架部65的其它例子的图。此外,在图12以及图13中,省略框架63等,简化图示。例如,如图12所示,在保管单元60u中,多个载置部64也可以配置于两个区域ar3、ar4。另外,脚手架部65(第一脚手架部
65a、第二脚手架部65b)也可以在俯视时,设置为t字形。区域ar3、ar4包含在x方向上为两列,在y方向上为三列的2
×
3的六个载置部64。区域ar3在俯视时设置于框架单体63u的-x侧且+y侧。区域ar4在俯视时设置于框架单体63u的+x侧且+y侧。第一脚手架部65a、第二脚手架部65b各自的端部延伸设置到框架单体63u的外缘附近。第一脚手架部65a沿着框架单体63u而设置。第二脚手架部65b设置于框架单体63u的x方向的中央部。第一脚手架部65a与第二脚手架部65b彼此的一部分连接或者接近地配置。在两个保管单元60u中,第一脚手架部65a彼此以能够由作业者u换乘的方式接近。
[0098]
另外,如图13所示,在保管单元60u中,多个载置部64也可以配置于四个区域ar5、ar6、ar7、ar8。另外,脚手架部65(第一脚手架部65a、第二脚手架部65b)也可以在俯视时,设置为十字形。区域ar5、ar6包含在x方向上为两列,在y方向上为两列的2
×
2的四个载置部64。区域ar7、ar8包含在x方向上为两列,在y方向上为一列的2
×
1的两个载置部64。区域ar5在俯视时设置于框架单体63u的-x侧且+y侧。区域ar6在俯视时设置于框架单体63u的+x侧且+y侧。区域ar7在俯视时设置于框架单体63u的-x侧且-y侧。区域ar8在俯视时设置于框架单体63u的+x侧且-y侧。第一脚手架部65a、第二脚手架部65b的端部分别延伸设置到框架单体63u的外缘附近。第一脚手架部65a沿着框架单体63u而设置。第二脚手架部65b设置于框架单体63u的x方向的中央部。第一脚手架部65a在框架单体63u的y方向上设置于内侧部分。第一脚手架部65a与第二脚手架部65b彼此的一部分连接或者接近地配置。在两个保管单元60u中,第一脚手架部65a彼此接近,以便能够由作业者u换乘。
[0099]
另外,在上述说明中,虽示出了在保管部60a中,各保管单元60u的多个载置部64以及脚手架部65(第一脚手架部65a、第二脚手架部65b)是相同结构的例子,但并不限于该结构。例如,在保管部60a中,各保管单元60u的多个载置部64以及脚手架部65(第一脚手架部65a、第二脚手架部65b)也可以相互不同。
[0100]
另外,在上述说明中,如图10所示,虽示出了保管部60a具备多个保管单元60u的例子,但保管部60a的结构并不限于该例。图14~图16是表示保管部60a的其它结构例的立体图。此外,在图14~图16中,省略了载置部64以及脚手架部65等,简化图示。例如,在保管部60a中,多个保管单元60u如图12以及图13所示,也可以在x方向上邻接地配置两个,也可以如图14所示,在俯视时以c字形(
コ
的字形)邻接地配置,也可以如图15所示,在俯视时以l字形邻接地配置,也可以如图16所示,邻接地配置有在x方向上为两列、在y方向上为三列的2
×
3的合计六个。
[0101]
另外,在第一实施方式的说明中,虽示出了保管单元60u具备连结部件62的例子,但并不限于该结构例,也可以不具备连结部件62。例如,如图10~图16所示,在保管部60a具备多个保管单元60u的情况下,也可以不在各保管单元60u的全部设置连结部件62而在一部分的保管单元60u设置连结部件62。例如,也可以将连结部件62设置于保管部60a的角部。在该结构的情况下,能够有效地抑制多个保管单元60u整体的摇晃。
[0102]
另外,也可以在保管部60、60a(保管单元60u)设置有置换foup等物品m中的物品的内部的气体的吹扫装置。
[0103]
另外,在上述实施方式中,虽以第一轨道r1(第一方向d1)与第二轨道r2(第二方向d2)正交的网格状轨道r为例进行了说明,但并不限于该结构。例如,轨道r也可以是第一轨道r1不与第二轨道r2正交的形态。另外,并不限于是第一轨道r1与第二轨道r2交叉的网格
状轨道r的形态,作为轨道r例如也可以是在从第一轨道r1的端部折弯的状态下配置第二轨道r2的形态。
[0104]
另外,在上述实施方式中,虽说明了在网格状轨道r的下侧保持物品m而行驶的高架输送车100的例子,但高架输送车100的结构并不限于上述结构。例如,本实施方式的输送系统sys、sys2以及保管部60、60a(保管单元60u)也能够适用于具备在网格状轨道r的上侧保持物品m而行驶的高架输送车100的系统。
[0105]
另外,在上述输送系统sys、sys2中,保管部60、60a的结构是一个例子,保管部60、60a的结构并不限于上述结构。例如,输送系统sys、sys2的结构只要是具备悬挂于网格状轨道r的吊挂部件;在俯视时至少包围一个格子c,并设置于吊挂部件的下部的框架63;设置于框架63的内侧,通过高架输送车100载置物品m的载置部64;以及设置于框架63的内侧,成为作业者u能够步行的通路的脚手架部65的结构,就不限于上述实施方式的结构例。例如,保管部60、60a也可以不由保管单元60u构成。
[0106]
此外,在上述实施方式中,虽示出了高架输送车100在一对第一轨道r1或者一对第二轨道r2上行驶的网格状轨道r的例子,但网格状轨道r并不限于该结构。例如,网格状轨道r(第一轨道r1、第二轨道r2)也可以是高架输送车100(行驶车)通过一个轨道行驶的单轨形式的轨道。
[0107]
附图标记的说明
[0108]
sys、sys2
…
输送系统
[0109]
10
…
主体部
[0110]
11
…
横向伸出机构
[0111]
12
…
转动部
[0112]
12a
…
转动部件
[0113]
12b
…
转动驱动部
[0114]
13
…
物品保持部
[0115]
13a
…
爪部
[0116]
13b
…
悬挂部件
[0117]
14
…
升降驱动部
[0118]
17
…
上部单元
[0119]
17a
…
上表面
[0120]
18
…
移载装置
[0121]
20
…
行驶部
[0122]
21
…
行驶车轮
[0123]
22
…
辅助车轮
[0124]
30
…
连结部
[0125]
31
…
支承部件
[0126]
32
…
连接部件
[0127]
33
…
行驶驱动部
[0128]
34
…
方向转换机构
[0129]
35
…
驱动源
[0130]
36
…
小齿轮
[0131]
37
…
齿条
[0132]
50
…
控制部
[0133]
60、60a
…
保管部
[0134]
60u
…
保管单元
[0135]
61
…
吊挂部件
[0136]
61a
…
连接部
[0137]
61b
…
棒状部
[0138]
61c
…
固定部
[0139]
62
…
连结部件
[0140]
62a
…
空间部
[0141]
62b
…
连接部
[0142]
63
…
框架
[0143]
63u
…
框架单体
[0144]
64
…
载置部
[0145]
64a
…
棒状部件
[0146]
65
…
脚手架部
[0147]
65a
…
第一脚手架部
[0148]
65b
…
第二脚手架部
[0149]
100
…
高架输送车
[0150]
ar1~ar8
…
区域
[0151]c…
格子
[0152]d…
间隙
[0153]
d1
…
第一方向
[0154]
d2
…
第二方向
[0155]r…
网格状轨道
[0156]
r1
…
第一轨道
[0157]
r2
…
第二轨道
[0158]
r3
…
交叉部
[0159]
g1
…
第一引导面
[0160]
g2
…
第二引导面
[0161]
g3a
…
连接引导面
[0162]
g3b
…
连接引导面
[0163]
g3c
…
连续面
[0164]u…
作业者。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1