一种基于蓝牙技术的塔机工况检测方法及检测系统与流程
1.本发明涉及一种塔机检测技术,特别是一种基于蓝牙技术的塔机工况检测方法及检测系统。
背景技术:
2.塔机是一种建筑工地上最常用的起重设备,主要通过旋转的吊臂与变幅小车将构件或材料准确的调运到其吊臂覆盖的任意部位;因为塔机整体的体积较大,为了保证塔机工作的正常以及安全,一般会在塔机上设置有安全监控系统,用于检测塔机各个工况的状况;因为整个安全监控系统是需要对塔机各个位置的工作状况进行存储、检测、判定以及根据判定的结果做出不同的反馈信号,而塔机上需要检测的位置包括塔机吊钩的高度、塔机的回转角度、小车的幅度等,这就要求了整个安全监控系统以及在进行具体工作的时候,需要有较多功能的控制单元来进行支撑,整体的生产成本较高;而且因为一般塔机与主控柜之间具有一定的距离,在进行信息传递的时候会需要操作员以、地面指挥人员以及中心监控人员一起配合才能够避免事故的发生,而这样的传输方式就需要耗费大量的时间在信息传递上,导致整体的工作效率较低。因此,现有的塔机用工况检测系统存在着生产成本较高和工作效率较低的问题。
技术实现要素:
3.本发明的目的在于,提供一种基于蓝牙技术的塔机工况检测方法及检测系统。本发明不仅能够降低生产成本,还具有工作效率高的优点。
4.本发明的技术方案:一种基于蓝牙技术的塔机工况检测方法,包括如下步骤:
5.步骤1;塔机动作模块根据指令启动,进入步骤2;其中塔机动作模块包括回转模块、起升模块和变幅模块;
6.步骤2:通信连接,启动第一蓝牙连接模块和第一解密模块。使得用于检测塔机起升、变幅及回转工况的确认模块与监控塔机工况的中央控制单元同信连接;连接完成后,进入步骤3;
7.步骤3:塔机状态检测,进入到步骤4;其中塔机状态检测为分别利用安装在塔机上和小车上的回转传感器、行程传感器和高度传感器对塔机的回转状态、起升状态以及变幅状态进行检测;
8.步骤4:确认模块进行预警判定;回转传感器、行程传感器和高度传感器会分别将检测到的塔机的回转状态、起升状态以及变幅状态数值信号发送给对应的确认模块,确认模块根据接收到的数值信号与内部设定的预警数值信号进行预警比较;若数值信号小于预警数值信号,则确认模块输出正常信号,进入步骤8;否则进入步骤5;
9.步骤5:确认模块进行报警判定;确认模块根据接收到的数值信号与内部设定的报警数值信号进行报警比较;若数值信号小于报警数值信号,则确认模块输出预警信号,进入步骤7;否则输出报警信号,进入步骤6;
10.步骤6:报警处理,确认模块将报警信号输送给第三转换输出模块,利用第三转换输出模块将报警信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行报警动作;
11.步骤7:预警处理,确认模块将预警信号输送给第二转换输出模块,利用第二转换输出模块将预警信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行预警动作;
12.步骤8:信号转换和输出,确认模块将正常信号输送给第一转换输出模块,利用第一转换输出模块将正常信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行正常动作。
13.前述的一种基于蓝牙技术的塔机工况检测方法中,所述步骤6中的报警动作为中央控制单元同步控制显示屏、蜂鸣器和报警灯启动,同时控制电磁开关断开,利用显示屏将报警状态下的塔机图像显示出来,同时通过蜂鸣器和报警灯进行声光报警;电磁开关断开后能够控制塔机回转、起升或/和变幅动作的电路断开,完成强制关闭。
14.前述的一种基于蓝牙技术的塔机工况检测方法中,所述步骤7中的预警动作为中央控制单元控制显示屏将报警状态下的塔机图像显示出来,同时中央控制单元控制控制恒流驱动器输出预警电流,从而通过led光源和光敏电阻改变控制塔机回转、起升或/和变幅动作的电路的电流,降低塔机运行的速度。
15.前述的一种基于蓝牙技术的塔机工况检测方法中,所述步骤8中的正常动作为中央控制单元控制显示屏将正常的塔机图像显示出来。
16.前述的一种基于蓝牙技术的塔机工况检测方法中,所述步骤4中确认模块在进行塔机状况判定的同时会对接收到的数值信号进行存储。
17.依据前述的一种基于蓝牙技术的塔机工况检测方法所构建的检测系统,包括中央控制单元、中央控制单元上通信连接有显示屏、报警灯、蜂鸣器、检测塔机回转状态的回转传感器、检测塔机小车行程的行程传感器和检测塔机吊钩高度的高度传感器;回转传感器、行程传感器和高度传感器上均电性连接有确认模块,每个确认模块上均电性连接有急停装置、第一转换输出模块、第二转换输出模块和第三转换输出模块;每个第一转换输出模块、第二转换输出模块和第三转换输出模块上均电性连接有第一蓝牙连接模块,每个第一蓝牙连接模块上均电性连接有第一解密模块;所述中央控制单元上电性连接有第二蓝牙连接模块,第二蓝牙连接模块上电性连接有第二解密模块;第二解密模块上电性连接有接近感应开关;所述急停装置包括与中央控制单元通信连接的恒流驱动器,恒流驱动器上电性连接有led光源;led光源的一侧设置有光敏电阻,光敏电阻的一侧设置有电磁开关;。
18.前述的检测系统中,所述确认模块根据回转传感器、行程传感器和高度传感器检测到的数据来分别判定塔机回转角、小车行程以及塔机吊钩高度是否超出限定,从而控制第一转换输出模块、第二转换输出模块和第三转换输出模块的工作状态。
19.前述的检测系统中,所述电磁开关和光敏电阻呈串联连接在塔机的驱动电路上。
20.前述的检测系统中,所述第一转换输出模块用于当确认模块判定正常情况下,将塔机状态信息转换为图像信号,并经图像信号发送给显示装置;所述第二转换输出模块用于当确认模块判定预警情况下,将塔机状态信息转换为图像信号,并经图像信号发送给显示装置;所述第三转换输出模块用于当确认模块判定报警情况下,将塔机状态信息转换为
图像信号,并经图像信号发送给显示装置。
21.前述的检测系统中,所述显示屏、报警灯和蜂鸣器呈相互并联设置。
22.与现有技术相比,本发明通过设置第一蓝牙连接模块和第一解密模块,第一解密模块能够通过预设的特定后缀编码值实现中央控制单元与确认模块进行快速自动蓝牙通信,从而不需要人工进行输入密码进行蓝牙配对,方便了使用,提高了工作效率;通过在回传传感器、行程传感器和高度传感器上分别连接有确认模块,利用确认模块单独判定塔机对应的回转角度、变幅程度或者起升高度,并根据确认模块确定的状态分别通过第一转换输出模块、第二转换输出模块或第三转换输出模块将信号输送出来,从而实现快速判定,提高了工作效率;而且通过设置单独的确认模块来判定单独的状态,从而能够减小对整个系统对确认模块、中央控制单元等的功能、型号等的要求,从而减小了整体系统的组装费用;通过在每个确认模块上均电性连接有通过设置恒流驱动器、led光源、光敏电阻和电磁开关,利用恒流驱动器、led光源和光敏电阻能够形成一个有确认模块控制的自动化可变电阻,以达到对塔机工作电流的调节作用,从而避免塔机因为出现极速断电而对塔机造成的损坏,从而延长了使用寿命。此外,本发明还通过在中央控制单元上电性连接有第二蓝牙连接模块和第二解密模块,第二解密模块上连接有接近感应开关,从而使得外部操作员带着感应件接近中央控制单元所处的位置后就能够自动控制第二解密模块和第二蓝牙连接模块启动,不需要人工操作,方便了使用;而第二蓝牙连接模块的设置能够方便操作员通过外部设备提取中央控制单元内部存储的塔机信息,从而提高了使用的灵活性;利用显示屏、报警灯和蜂鸣器,通过显示屏再配合第一转换输出模块、第二转换输出模块和第三转换输出模块,能够自动的将塔机状态图像显示出来,方便操作员观看;而报警灯和蜂鸣器的能够形成声光报警装置,从而方便操作员及时得到塔机危险信号,从而方便了使用。因此,本发明不仅能够降低生产成本,还具有工作效率高、使用安全性高、操作方便、使用灵活性高和使用寿命长的优点。
附图说明
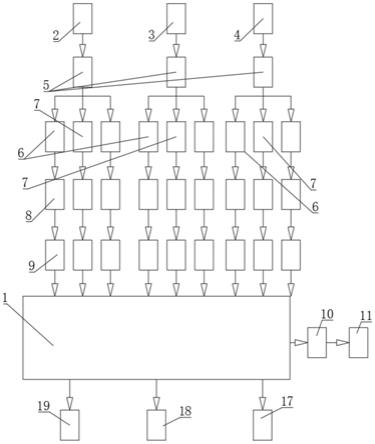
23.图1是本发明的结构示意图;
24.图2是恒流驱动器与光敏电阻的连接结构示意图;
25.图3是本发明的流程图。
26.附图中的标记为:1
‑
中央控制单元,2
‑
回转传感器,3
‑
行程传感器,4
‑
高度传感器,5
‑
确认模块,6
‑
第一转换输出模块,7
‑
第二转换输出模块,8
‑
第一蓝牙连接模块,9
‑
第一解密模块,10
‑
第二蓝牙连接模块,11
‑
第二解密模块,12
‑
接近感应开关,13
‑
恒流驱动器,14
‑
led光源,15
‑
光敏电阻,16
‑
电磁开关,17
‑
显示屏,18
‑
报警灯,19
‑
蜂鸣器。
具体实施方式
27.下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
28.实施例。一种基于蓝牙技术的塔机工况检测方法,构成如图1至3所示,包括如下步骤:
29.步骤1;塔机动作模块根据指令启动,进入步骤2;其中塔机动作模块包括回转模
块、起升模块和变幅模块;
30.步骤2:通信连接,启动第一蓝牙连接模块和第一解密模块。使得用于检测塔机起升、变幅及回转工况的确认模块与监控塔机工况的中央控制单元同信连接;连接完成后,进入步骤3;
31.步骤3:塔机状态检测,进入到步骤4;其中塔机状态检测为分别利用安装在塔机上和小车上的回转传感器、行程传感器和高度传感器对塔机的回转状态、起升状态以及变幅状态进行检测;
32.步骤4:确认模块进行预警判定;回转传感器、行程传感器和高度传感器会分别将检测到的塔机的回转状态、起升状态以及变幅状态数值信号发送给对应的确认模块,确认模块根据接收到的数值信号与内部设定的预警数值信号进行预警比较;若数值信号小于预警数值信号,则确认模块输出正常信号,进入步骤8;否则进入步骤5;
33.步骤5:确认模块进行报警判定;确认模块根据接收到的数值信号与内部设定的报警数值信号进行报警比较;若数值信号小于报警数值信号,则确认模块输出预警信号,进入步骤7;否则输出报警信号,进入步骤6;
34.步骤6:报警处理,确认模块将报警信号输送给第三转换输出模块,利用第三转换输出模块将报警信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行报警动作;
35.步骤7:预警处理,确认模块将预警信号输送给第二转换输出模块,利用第二转换输出模块将预警信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行预警动作;
36.步骤8:信号转换和输出,确认模块将正常信号输送给第一转换输出模块,利用第一转换输出模块将正常信号转换成图像信号,并同时通过蓝牙同信传输方式发送给中央控制单元,中央控制单元进行正常动作。
37.所述步骤6中的报警动作为中央控制单元同步控制显示屏、蜂鸣器和报警灯启动,同时控制电磁开关断开,利用显示屏将报警状态下的塔机图像显示出来,同时通过蜂鸣器和报警灯进行声光报警;电磁开关断开后能够控制塔机回转、起升或/和变幅动作的电路断开,完成强制关闭;所述步骤7中的预警动作为中央控制单元控制显示屏将报警状态下的塔机图像显示出来,同时中央控制单元控制控制恒流驱动器输出预警电流,从而通过led光源和光敏电阻改变控制塔机回转、起升或/和变幅动作的电路的电流,降低塔机运行的速度;所述步骤8中的正常动作为中央控制单元控制显示屏将正常的塔机图像显示出来;所述步骤4中确认模块在进行塔机状况判定的同时会对接收到的数值信号进行存储。
38.依据上述的一种基于蓝牙技术的塔机工况检测方法所构建的检测系统,包括中央控制单元1、中央控制单元1上通信连接有显示屏17、报警灯18、蜂鸣器19、检测塔机回转状态的回转传感器2、检测塔机小车行程的行程传感器3和检测塔机吊钩高度的高度传感器4;回转传感器2、行程传感器3和高度传感器4上均电性连接有确认模块5,每个确认模块5上均电性连接有急停装置、第一转换输出模块6、第二转换输出模块7和第三转换输出模块;每个第一转换输出模块6、第二转换输出模块7和第三转换输出模块上均电性连接有第一蓝牙连接模块8,每个第一蓝牙连接模块8上均电性连接有第一解密模块9;所述中央控制单元1上电性连接有第二蓝牙连接模块10,第二蓝牙连接模块10上电性连接有第二解密模块11;第
二解密模块11上电性连接有接近感应开关12;所述急停装置包括与中央控制单元1通信连接的恒流驱动器13,恒流驱动器13上电性连接有led光源14;led光源14的一侧设置有光敏电阻15,光敏电阻15的一侧设置有电磁开关16;。
39.所述确认模块5根据回转传感器2、行程传感器3和高度传感器4检测到的数据来分别判定塔机回转角、小车行程以及塔机吊钩高度是否超出限定,从而控制第一转换输出模块6、第二转换输出模块7和第三转换输出模块的工作状态;所述电磁开关16和光敏电阻15呈串联连接在塔机的驱动电路上;所述第一转换输出模块6用于当确认模块5判定正常情况下,将塔机状态信息转换为图像信号,并经图像信号发送给显示装置;所述第二转换输出模块7用于当确认模块5判定预警情况下,将塔机状态信息转换为图像信号,并经图像信号发送给显示装置;所述第三转换输出模块用于当确认模块5判定报警情况下,将塔机状态信息转换为图像信号,并经图像信号发送给显示装置;所述显示屏17、报警灯18和蜂鸣器19呈相互并联设置。
40.工作原理:在进行具体工作的时候,先使得整个系统连接上外部安全市电,使得中央控制单元1、回转传感器2、行程传感器3、高度传感器4、确认模块5、第一蓝牙连接模块8和第一解密模块9通电启动;其中第一蓝牙连接模块8和第一解密模块9启动后,第一蓝牙连接模块8会通过第一解密模块9发送连接信号发给中央控制单元1;而因为第一解密模块9内部设定的特定后缀编码值,从而使得第一蓝牙连接模块8能够直接与中央控制单元1完成蓝牙连接,不需要输入密码等,从而方便了操作;而回转传感器2、行程传感器3和高度传感器4启动后就会对塔机的回转角度、小车行程幅度以及塔机吊钩的高度进行自动检测,并将自身检测到的数值信号发送给对应的确认模块5,确认模块5在接收到对应的数值信号后就会将该数值信号进行存储,同时提取内部设定的预警值以及报警值,并将数值信号与预警值以及报警值分别进行比较判定;当检测到的数值信号没有超过预警值时,确认模块5就会发出一个正常信号给第一转换输出模块6,利用第一转换输出模块6将正常信号转换成图像信号并发送给中央控制单元1,中央控制单元1在接收到第一转换输出模块6发送过来的图像信号后就会通过显示屏17显示出来,方便操作员观察;而当检测到的数值信号超过预警值,但没有超过报警值时,确认模块5就会发出一个预警信号给第二转换输出模块7,第二转换输出模块7同样将该预警信号转换成图像信号并发送给中央控制单元1,并由显示屏17显示出来;同时确认模块5控制恒流驱动器13输出的电流,从而改变led光源14产生的光的亮度,当led光源14的发光亮度发生改变时,照射在光敏电阻15上的亮度就会发生改变,从而使得光敏电阻15的整体电阻就会发生改变,从而能够调节对应的塔机的回转电机、小车或者控制塔机吊钩升降的电机的通电电流,进而使得其整体的行动变缓慢或者慢慢暂停;当检测到的数值信号超过报警值时,确认模块5就会发出一个报警信号给第二转换输出模块7,第二转换输出模块7同样将该报警信号转换成图像信号并发送给中央控制单元1,中央控制单元1就会通过显示屏17将报警信号显示出来,同时中央控制单元1还会控制报警灯18以及蜂鸣器19启动,利用报警灯18和蜂鸣器19能够形成一个声光报警信号,从而能够起到最大程度的报警提醒信号;同时确认模块5还会直接控制电磁开关16断开,从而使得塔机上对应的工作位置断电停止工作,避免因为操作员处理不及时造成的危险现象发生,提高了使用的安全性;当外部人员想通过外部携带的设备查兰塔机工作状况的时候,只需要将对应的具有感应件的设备移动到靠近中央控制单元1的周围,这时接近感应开关12就会闭合,使得第二
解密模块11和第二蓝牙连接模块10启动,使得中央控制单元1能够与外部携带设备实现自动蓝牙连接,从而不仅方便了操作,还提高了整体监控系统的使用灵活性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1