一种用于安装管道的无轨自行走龙门及其使用方法与流程
1.本发明属于管道安装设备技术领域,尤其是涉及一种用于安装管道的无轨自行走龙门及其使用方法。
背景技术:
2.建筑施工企业在管道安装施工过程中,经常会碰到在一个工作面进行多条管道同时安装的情况,且施工工作面场地有限,如在隧道、涵洞等局限空间条件下进行多管道同时安装,由于受到隧洞内已有管道的限制,常规的施工机械无法在隧洞内自由移动,施工方法一般为利用管道吊架配合人工使用倒链进行管道安装。
3.然而,在隧洞及涵洞等这种特殊的场地环境条件下进行多条管道同时安装时,传统的管道安装方法存在很大的局限性:
4.1、传统的管道支吊架跨度较小,只能满足隧道内单条管道的安装,无法满足隧洞内多条管道同时安装。
5.2、传统的管道支吊架结构简单,其基本结构为门式结构,只能满足管道的上下纵向移位,当安装管道需要进行左右横向移位时,则需要移动整个管道支吊架来实现,操作流程复杂且无法保证施工安全。
6.3、传统的管道支吊架挂钩必须配合倒链使用人工进行操作,当遇到较大管径的管道时,需要多人操作,人工耗费量大,场地狭小,没有多人操作空间。
7.4、传统的管道支吊架在隧洞内进行移动时,无法实现半自动化操作,只能由人工进行移动。
技术实现要素:
8.本发明要解决的问题是提供一种用于安装管道的无轨自行走龙门及其使用方法,有效的解决传统管道支架中无法满足隧洞内多条管道同时安装;当安装管道需要进行左右横向移位时,则需要移动整个管道支吊架来实现,操作流程复杂且无法保证施工安全;管道支吊架在隧洞内进行移动时,无法实现半自动化操作,只能由人工进行移动,当遇到较大管径的管道时,需要多人操作,人工耗费量大,场地狭小,没有多人操作空间的问题。
9.为解决上述技术问题,本发明采用的技术方案是:一种用于安装管道的无轨自行走龙门,其特征在于,包括:
10.横梁,所述横梁上设置有一轨道;
11.支撑架,设置在所述横梁的底部,支撑所述横梁;
12.吊装装置,可移动的设置在所述轨道上,用于吊装管道;
13.索链传送装置,设置在所述横梁上,且在所述吊装装置旁,用于控制所述吊装装置的上下移动;
14.移动装置,设置在所述支撑架的底部,用于移动无轨自行走龙门;
15.操作手柄,设置在所述横梁或所述支撑架上,用于控制所述索链传动装置、所述吊
装装置和所述移动装置。
16.优选地,所述吊装装置包括设置在所述横梁上的滑动小车以及设置在所述滑动小车底部的提升滑轮;所述滑动小车在所述轨道上左右移动,所述提升滑轮随所述滑动小车左右进行移动。
17.更优选地,所述横梁的两端还设有限位挡板,防止所述滑动小车滑出所述轨道。
18.更优选地,所述提升滑轮上还设有索链和挂钩,所述挂钩设置在所述索链上,用于连接所述管道;所述索链传送装置控制所述索链上下移动,从而带动所述管道上下移动。
19.更优选地,所述吊装装置还包括第一电动机,控制所述滑动小车在所述轨道上来回移动。
20.优选地,所述索链传送装置包括传送机和索链储存件,所述传送机设置在所述横梁上,且在所述吊装装置旁,用于控制所述吊装装置的上下移动;所述索链储存件设置在所述传送机和所述吊装装置的底部,储存所述吊装装置中的索链。
21.优选地,所述移动装置包括滚轮,所述滚轮设置在所述支撑架的底部,用于移动所述无轨自行走龙门。
22.更优选地,所述移动装置还包括第二电动机,设置在所述支撑架上,控制所述滚轮移动,从而移动所述无轨自行走龙门。
23.一种使用如权利要求1所述的一种用于安装管道的无轨自行走龙门的方法,其特征在于:所述操作手柄控制所述移动装置将所述无轨自行走龙门移动至隧道中,再通过所述操作手柄控制所述吊装装置移动至所述管道起吊位置,将所述管道与所述吊装装置连接,通过所述操作手柄控制所述索链传动装置将所述吊装装置提升至安装标高位置,再微调所述吊装装置至安装位置,安装所述管道。
24.优选地,所述移动装置包括第二电动机和滚轮;所述操作手柄控制所述第二电动机,所述第二电动机控制滚轮来移动所述无轨自行走龙门。
25.优选地,所述吊装装置包括第一电动机、提升滑轮以及滑动小车;所述操作手柄控制所述第一电动机,所述第一电动机控制所述滑动小车在轨道上来回移动,所述滑动小车带动所述吊装装置进行移动。
26.采用上述技术方案,在支撑架的底部设置有滚轮和第二电机,滚轮前后左右进行移动能够带动整个无轨自行走龙门进行移动,解决现有技术中无轨自行走龙门在隧道中无法自由移动,只能通过人工搬运来进行位置的变换,浪费人力、降低安装效率的问题。
27.第二电极的设置能够自动控制滚轮的移动,相比人工控制移动速度以及移动方向,人工操控第二电极进行滚轮的移动速度以及移动方向的控制会更加自动化智能化,节省人工,提高安装效率。
28.采用上述技术方案,吊装装置配合索链传送装置,吊装装置的挂钩能够连接管道,索链传送装置控制吊装装置上下移动,调整至安装位置即可,解决现有技术中需要挂钩必须配合倒链使用且需要人工进行操作,浪费大量人工的问题。
29.吊装装置还配合滑动小车进行左右移动,滑动小车在横梁上的轨道进行左右移动,带动吊装装置进行左右移动,进而带动吊装装置底部连接的管道进行横向的位置调整,解决现有技术中只能满足管道上下移位,不能进行横向位置调整的弊端,若想要进行横向位置调整只能移动整个管道支吊架,浪费大量人工,降低安装效率的问题。
附图说明
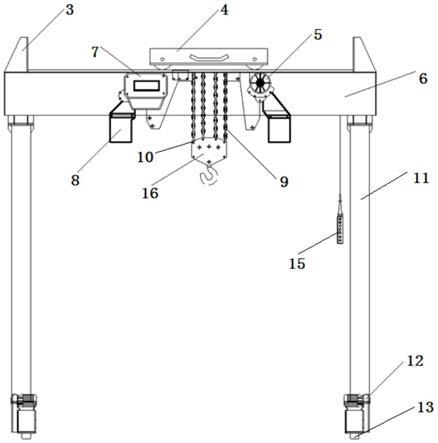
30.图1是本发明实施例一种用于安装管道的无轨自行走龙门结构示意图
31.图2是本发明实施例一种用于安装管道的无轨自行走龙门侧视图
32.图3是本发明实施例一种用于安装管道的无轨自行走龙门使用示意图
33.图中:
34.1、隧洞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、管道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、限位挡板
35.4、滑动小车
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5、第一电动机
ꢀꢀꢀꢀꢀꢀꢀ
6、横梁
36.7、传送机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、索链储存件
ꢀꢀꢀꢀꢀꢀꢀ
9、索链
37.10、提升滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、支撑架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、第二电动机
38.13、滚轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15、操作手柄
39.16、挂钩
具体实施方式
40.下面结合实施例和附图对本发明作进一步说明:
41.在本发明实施例的描述中,需要理解的是,术语“顶部”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
42.如图1一种用于安装管道的无轨自行走龙门结构示意图和图2一种用于安装管道的无轨自行走龙门侧视图所示,一种用于安装管道的无轨自行走龙门,包括:
43.横梁6,横梁6上设置有一轨道14,轨道14水平设置在横梁6上,与横梁6的长度一致;
44.支撑架11,设置在横梁6两侧的底部,支撑横梁6,支撑架11的根数为4根,两两一组的焊接在横梁6的两端,在侧面支撑架11与横梁6形成一个梯形,能够更加稳定的支撑横梁6,保证管道2安装的安全;
45.吊装装置,可移动的设置在轨道14上,用于吊装管道2;
46.索链传送装置,设置在横梁6上,且在吊装装置旁,用于控制吊装装置的上下移动;
47.移动装置,设置在支撑架11的底部,用于移动无轨自行走龙门;
48.操作手柄,设置在横梁6或支撑架11上,用于控制索链传动装置、吊装装置和移动装置。
49.具体的,吊装装置包括设置在横梁6上的滑动小车4以及可拆卸的连接在滑动小车4底部的提升滑轮10;滑动小车4能够在横梁6上自由的沿轨道14左右移动,提升滑轮随滑动小车4左右进行移动。
50.提升滑轮10上设置有索链9和挂钩16,索链9一端连接滑动小车4,另一端连接挂钩16,索链9的长度要足够长,至少能够支持管道从地面位置提升至横梁6处的位置,保证在纵向移动上没有阻碍;挂钩16的底端用于连接管道2,确保管道2能够平稳的移动至安装位置。
滑动小车4的底部与索链9连接,在滑动小车4左右移动的时候,带动索链9移动,索链9又连接挂钩16,挂钩16也随滑动小车4左右移动,挂钩16上连接的管道2也随滑动小车4左右移动,可以在管道2安装过程中,在无轨自行走龙门整体位置不变的情况下,可以实现管道2的横向位移调整,解决现有技术中若需要将管道2横向位移时需要移动整体管道支吊架,浪费人工,降低安装效率的问题。
51.由于在隧洞1等特定局限空间内进行管道2的安装,利用索链9易绑扎、结扣等特点,用索链9代替钢丝绳,实际施工中可以使用索链9直接附着于管道2上进行管道2的提升。
52.在一些可行的实施例中,吊装装置还包括第一电动机5,安装在横梁6的底部,不会影响滑动小车4的来回滑动,且在提升滑轮10旁。第一电动机5控制滑动小车4在轨道14上来回移动,第一电动机5通过操作手柄15进行控制,操作手柄15控制一电动机5,第一电动机5控制滑动小车4在轨道14上来回滑动,将管道2移动至安装位置。
53.在一些可行的实施例中,还设有限位挡板3,焊接在横梁6的两端,防止滑动小车4因控制不当而滑出轨道14,能够更安全的操控滑动小车4的左右移动,不用担心发生滑动小车4掉落的危险。
54.索链传送装置包括传送机7和索链储存件8,传送机7用螺栓安装在横梁6的底部,不影响滑动小车4的来回滑动,且在提升滑轮10旁,不与第一电动机5同侧。传送机7用于控制吊装装置的上下移动,其中,控制索链9的移动来控制整个吊装装置的纵向移动。
55.索链储存件8的个数为2个,用螺栓安装在传送机7和第一电动机5的底部,储存吊装装置中的索链9。当提升滑轮10向上移动时,索链9同时向两个索链储存件8中储存索链;当提升滑轮10向下移动时,索链9从两个索链储存件8中伸出,随提升滑轮10的下降而伸直。
56.移动装置包括滚轮13,滚轮13可移动的安装在支撑架11的底部,滚轮13的个数与支撑架11的个数一致,每一根支撑架11的底部均安装有一滚轮13。滚轮13能够自由的移动无轨自行走龙门,和原来传统的人工移动管道支吊架相比,下部配有滚轮13,不依附于轨道,直接实现无轨移动,解决现有技术中还需在底部配备轨道或者人工移动整个管道支吊架,浪费时间以及人力的问题。
57.一些可行的实施例中,移动装置还包括第二电动机12,用螺栓安装在支撑架11上,操作手柄15控制第二电动机12,第二电动机12控制滚轮13前后左右移动,从而移动无轨自行走龙门。
58.整个无轨自行走龙门的形状大小可以根据实际施工隧洞1的工作面大小而进行尺寸的调整,可以在隧洞1等类似的局限空间下普遍应用。
59.本发明的工作过程:首先根据隧洞1断面大小制作相应大小的无轨自行走龙门,利用操作手柄15控制第二电动机12,控制滚轮13移动,将无轨自行走龙门移动至管道2所在的位置,再利用操作手柄15控制传送机7,传送机7控制提升滑轮10下降至管道2的位置,挂钩16与待安装的管道2进行连接,连接完成后,再控制提升滑轮10将管道2上升至安装高度,此时利用操作手柄15控制第一电动机5,第一电动机5控制滑动小车4在轨道14上左右移动,将管道2移动至安装位置,确认为安装位置后进行管道2的安装,安装完成后利用操作手柄15将挂钩移动至下一管道2的位置,进行一次管道2的安装,节省不少安装时间,能够在同一时间内安装更多的管道2。
60.本发明的有益效果是:
61.1、无轨自行走龙门实现了半自动化操作,大量节省管道2安装所需要的人工,安装时间显著减少,操作人员可通过操作手柄15对其进行便捷控制。
62.2、这种在局限空间下,如隧洞1等环境下的管道安装作业,具有可拓展性、易用性、实用性。
63.3、在场地有限、局限空间隧洞1内这种特定的环境下能够便捷的进行一条或多条管道2安装施工,改变传统的管道2安装工艺,使管道2安装成本大大降低,管道2安装作业更经济更合理。
64.4、无轨自行走龙门造价较低,管道2安装安全性有保障,设备零件更换方便、操作简单。
65.以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1