一种基于计算机视觉的垃圾分类系统
1.本发明涉及垃圾处理技术领域,尤其涉及一种基于计算机视觉的垃圾分类系统。
背景技术:
2.随着现代人们生活水平的提高和各项消费的增加,城市垃圾产生量日益增多,环境状况也逐渐恶化。面对此种局面,垃圾分类是解决日益增多垃圾的最有效方式,也是对垃圾进行有效处置的一种科学管理方法,如何通过垃圾分类管理,最大限度地实现垃圾资源利用,减少垃圾处置的数量,改善生存环境状态,是一个急需解决的问题。
3.垃圾分类在源头将垃圾分类投放,目前垃圾主要分为可回收垃圾、有害垃圾、干垃圾、湿垃圾等。其中,可回收垃圾又主要包括废纸、塑料、玻璃、金属等几大类,可回收垃圾是可以再生循环的垃圾,因此对可回收垃圾进行分类回收再利用十分的有必要。
4.目前现有的垃圾分类装置是有多个垃圾箱组成,不同的垃圾箱内存放不同种类的垃圾,在每个垃圾箱的表面都印刷有存放对应种类垃圾的标识,但是此种垃圾分类装置需要使用者自己来识别垃圾对应的种类,然后在将垃圾投放至对应的垃圾箱内,在投放时使用者有时候并不能够准确的判断出垃圾对应的种类,导致垃圾分类投放实施的并不是十分的顺利。
技术实现要素:
5.为了解决上述现有技术中存在的不足,本发明提供一种基于计算机视觉的垃圾分类系统,其能实现垃圾的自动检测并进行分类投放。
6.本发明解决上述技术问题所采用的技术方案为:一种基于计算机视觉的垃圾分类系统,包括身份识别模块,用于获取当前用户的身份信息;图像采集模块,用于对投放的垃圾进行图形采集,并将图像采集数据上传;图像识别模块,用于接收图像采集数据,并进行判断分析,根据分析结果对投放的垃圾进行分类,并得出分类结果后进行上传;垃圾回收柜,包括柜体、传送带、机械手臂和多个间隔设置的回收箱,所述柜体具有一与所述传送带对接的投入口,所述传送带水平设置在所述柜体内,并位于多个所述回收箱的上方,所述机械手臂用于根据分类结果将对应垃圾投入对应所述回收箱中;控制模块,所述控制模块分别与所述身份识别模块、所述图像识别模块和所述机械手臂通讯连接,所述控制模块设置为根据所述图像识别模块获取的分类结果及该垃圾对应的位置信息,并控制所述机械手臂抓取该垃圾投入至对应所述回收箱中。
7.所述控制模块存储有用户的注册信息,注册信息为:用户姓名、用户住址、人脸信息、生物指纹信息或电话号码信息的其中之一信息或任意组合信息,当身份识别模块获取当前垃圾投放者的用户信息后与存储在控制模块的注册信息进行对比,若判断为注册用户,则打开投入口,若判断为非注册用户,则提示当前垃圾投放者进行注册,注册成功后,将
当前垃圾投放者的用户信息存储到控制模块中,并打开投入口。该结构中,垃圾回收柜只对信任用户进行开放,如果用户事先进行注册过,则控制模块储存有该用户信息,一旦认证通过后,即可直接打开投入口,如果用户为非注册用户,则预留用户姓名、用户住址、人脸信息、生物指纹信息或电话号码信息的其中之一信息或任意组合信息,以方便后期进行识别。
8.所述图像识别模块包括深度学习训练及计算单元,所述深度学习训练及计算单元用以根据所述图像采集数据识别出垃圾的材质得出目标垃圾及目标垃圾对应的位置信息。
9.所述深度学习训练及计算单元通过仿照人工神经网络的模式进行垃圾图片分类学习,从而获得对垃圾类别数据的高准确度判断,具体步骤为:步骤1、收集大量垃圾图像数据,形成垃圾图像数据集;步骤2、将步骤s1中的垃圾图像数据集送入深度卷积神经网络中进行模型的训练,生成垃圾分类神经网络模型;在垃圾分类神经网络模型的训练过程中,垃圾图像分类模型训练完一个epoch后,进行模型验证;训练完毕后使用测试集测试垃圾图像分类模型,测试集用于测试深度学习模型学到的垃圾分类能力,并根据测试结果对该模型进一步的优化和更新;步骤3、获取待分类垃圾的图像采集数据;步骤4、将待分类垃圾的图像采集数据输入到步骤2中的垃圾分类神经网络模型中;步骤5、根据垃圾分类神经网络模型的输出结果获得待分类垃圾的类别。
10.步骤1中大量垃圾图像数据来源为网络照片和现实生活照片,垃圾图像数据集采用图像增强技术进行随机扩充,所述图像增强技术包括随机翻转、随机亮度和随机裁剪。
11.待分类垃圾的类别包括可回收垃圾、厨余垃圾、有害垃圾和其他垃圾,所述回收箱的类别也为四个,分别包括可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。
12.所述图像采集模块包括图片裁剪单元和图片处理单元,所述图片裁剪单元用于将投放的垃圾裁剪为512像素*512的图片,所述图片处理单元用于将裁剪后的图片进行尺度变换和归一化后发送至所述图像识别模块。其好处在于加快梯度下降求解最优的速度,以便更快得到垃圾分类的结果。
13.与现有技术相比,本发明的优点在于:本发明通过对待投放垃圾进行识别,进而通过控制模块控制机械手臂将垃圾投入对应的回收箱中,从而能够对垃圾进行正确分类,提高了分类效率和准确性;此外借助深度学习的方法,实现了对生活垃圾的准确分类,保证用户在不明确垃圾类别的情况使用本应用可以准确快速得到其类别。
附图说明
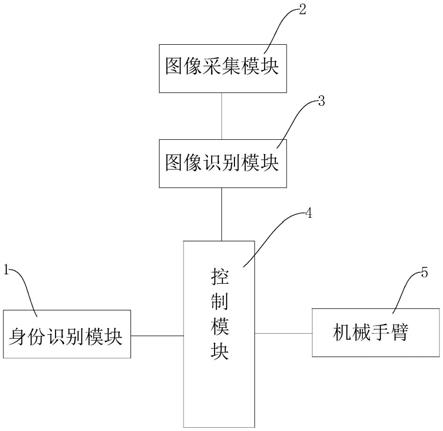
14.图1为本发明的系统框图。
具体实施方式
15.以下结合附图和实施例对本发明作进一步详细说明,但不作为对本发明的限定。
16.实施例:如图所示,一种基于计算机视觉的垃圾分类系统,包括身份识别模块1,用于获取当前用户的身份信息;图像采集模块2,用于对投放的垃圾进行图形采集,并将图像采集数据上传;
图像识别模块3,用于接收图像采集数据,并进行判断分析,根据分析结果对投放的垃圾进行分类,并得出分类结果后进行上传;垃圾回收柜,包括柜体、传送带、机械手臂5和多个间隔设置的回收箱,柜体具有一与传送带对接的投入口,传送带水平设置在柜体内,并位于多个回收箱的上方,机械手臂5用于根据分类结果将对应垃圾投入对应回收箱中;控制模块4,控制模块4分别与身份识别模块1、图像识别模块3和机械手臂5通讯连接,控制模块4设置为根据图像识别模块3获取的分类结果及该垃圾对应的位置信息,并控制机械手臂5抓取该垃圾投入至对应回收箱中。
17.控制模块4存储有用户的注册信息,注册信息为:用户姓名、用户住址、人脸信息、生物指纹信息或电话号码信息的其中之一信息或任意组合信息,当身份识别模块1获取当前垃圾投放者的用户信息后与存储在控制模块4的注册信息进行对比,若判断为注册用户,则打开投入口,若判断为非注册用户,则提示当前垃圾投放者进行注册,注册成功后,将当前垃圾投放者的用户信息存储到控制模块4中,并打开投入口。该结构中,垃圾回收柜只对信任用户进行开放,如果用户事先进行注册过,则控制模块4储存有该用户信息,一旦认证通过后,即可直接打开投入口,如果用户为非注册用户,则预留用户姓名、用户住址、人脸信息、生物指纹信息或电话号码信息的其中之一信息或任意组合信息,以方便后期进行识别。
18.图像识别模块3包括深度学习训练及计算单元,深度学习训练及计算单元用以根据图像采集数据识别出垃圾的材质得出目标垃圾及目标垃圾对应的位置信息。
19.深度学习训练及计算单元通过仿照人工神经网络的模式进行垃圾图片分类学习,从而获得对垃圾类别数据的高准确度判断,具体步骤为:步骤1、收集大量垃圾图像数据,形成垃圾图像数据集;步骤2、将步骤s1中的垃圾图像数据集送入深度卷积神经网络中进行模型的训练,生成垃圾分类神经网络模型;在垃圾分类神经网络模型的训练过程中,垃圾图像分类模型训练完一个epoch后,进行模型验证;训练完毕后使用测试集测试垃圾图像分类模型,测试集用于测试深度学习模型学到的垃圾分类能力,并根据测试结果对该模型进一步的优化和更新;步骤3、获取待分类垃圾的图像采集数据;步骤4、将待分类垃圾的图像采集数据输入到步骤2中的垃圾分类神经网络模型中;步骤5、根据垃圾分类神经网络模型的输出结果获得待分类垃圾的类别。
20.步骤1中大量垃圾图像数据来源为网络照片和现实生活照片,垃圾图像数据集采用图像增强技术进行随机扩充,图像增强技术包括随机翻转、随机亮度和随机裁剪。
21.待分类垃圾的类别包括可回收垃圾、厨余垃圾、有害垃圾和其他垃圾,回收箱的类别也为四个,分别包括可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。
22.图像采集模块2包括图片裁剪单元和图片处理单元,图片裁剪单元用于将投放的垃圾裁剪为512像素*512的图片,图片处理单元用于将裁剪后的图片进行尺度变换和归一化后发送至图像识别模块3。其好处在于加快梯度下降求解最优的速度,以便更快得到垃圾分类的结果。
23.值得注意的是,以上所述仅为本发明的较佳实施例,并非因此限定本发明的专利
保护范围,本发明还可以对上述各种零部件的构造进行材料和结构的改进,或者是采用技术等同物进行替换。故凡运用本发明的说明书及图示内容所作的等效结构变化,或直接或间接运用于其他相关技术领域均同理皆包含于本发明所涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1