一种智能垃圾分类箱与工作方法
1.本发明属于垃圾分类领域。
2.
背景技术:
3.随着人口增长以及城乡一体化脚步的加快,城镇人口越来越集中,生活习惯和环境均有了较大的改变,而伴随而来的还有越积越多的生活垃圾,生活垃圾处理成了和我们生活息息相关的事情。根据中国住建部2018年发布的《中国城市建设统计年鉴》数据显示,2010年以来,我国生活垃圾清运量逐年上升,2016年超过2亿吨,达到2.04亿吨,同比增长6.81%;2017约达到2.16万吨,同比增长5.82%。
4.在此背景下,垃圾数量统计、处理和分类就显得尤为重要,而市场上现有的垃圾箱因为没有监控系统,不能随时的监控垃圾箱内的垃圾数量,导致有时候垃圾箱没有被倒满就被垃圾回收车拉走倾倒。这个在一定程度上浪费了社会的公共资源。比如人力,物力和财力等。而垃圾数量的严格监控可以更精准的统计出垃圾的数量,进而通过大数据统计分析出对应的问题。尽快的找到对策。减少环境污染。为地球绿化做贡献。
5.因为传统的垃圾箱因为没有定位机制,有时垃圾回收车司机可能会绕不必要的路来回收垃圾箱,除此之外,定位技术还可以有效的防止垃圾箱遭到破坏,挪动乃至失窃等意外。
6.本产品上的主要亮点在于垃圾箱上的视觉技术,他可以辅助垃圾分类,当要扔垃圾的人不知道自己的垃圾属于什么垃圾的时候,可以使用视觉分类技术帮助人们快速分辨垃圾类型,让垃圾回到自己的位置。提高了人们的环保意志。
7.垃圾箱上的自动开(关)盖技术让垃圾箱的异味不会随处飘散,解放了人们的双手,在当前新冠阴影仍存的情况下,不碰有污染的地方,间接的也阻断了可能感染新冠的一种途径。
8.自动关盖封闭式垃圾箱让垃圾不露天,间接的美化了城市。
9.
技术实现要素:
10.发明目的:为了克服现有技术中存在的不足,本发明提供一种自动识别和开盖的智能垃圾分类箱与工作方法。
11.技术方案:为实现上述目的,本发明的一种智能垃圾分类箱,包括四个并列的垃圾桶柜,各所述垃圾桶柜内均设置有一个上端为开放入口的垃圾桶;各所述垃圾桶柜的前部下侧均设置有柜门,所述柜门打开后,所述垃圾桶柜能从垃圾桶柜内取出;各所述垃圾桶柜的前部上侧进一步设置有一个矩形投料口;各所述矩形投料口处均设置有一个活动投料门,所述活动投料门的上端通过第一铰接件与所述矩形投料口顶端铰接。
12.进一步的,每一个垃圾桶柜的前部均设置有一个第一光电开关,所述第一光电开关能识别到有人靠近;进一步的,每一个垃圾桶的上方均设置有一个第二光电开关;所述第二光电开关能识别所对应的垃圾桶内的垃圾是否装满。
13.进一步的,四个所述垃圾桶柜分别为可回收垃圾桶柜、厨余垃圾桶柜、有害垃圾桶柜和其他垃圾桶柜;四个所述活动投料门分别为第一投料门、第二投料门第三投料门和第四投料门;第一投料门、第二投料门第三投料门和第四投料门的前侧面上分别标识有
‘
可回收物’、
‘
厨余垃圾’、
‘
有害垃圾’和
‘
其他垃圾’。
14.进一步的,每一个垃圾桶柜内的侧部均固定安装有一个电机,还包括一个竖向的椭圆控制轮,所述电机的输出轴末端固定连接所述椭圆控制轮侧壁;且所述椭圆控制轮的一个焦点f所述电机的输出轴轴线重合;将所述椭圆控制轮的椭圆轮廓上距离所述焦点f最远的一点记为椭圆远端点;各所述垃圾桶柜内均设置有一根连杆;所述连杆的一端通过第二铰接件与所述椭圆控制轮的椭圆远端点处的侧部铰接;所述连杆的另一端通过第三铰接件与所述活动投料门的下端铰接连接;还包括设置在椭圆控制轮前后侧的第一微动开关和第二微动开关,所述第一微动开关和第二微动开关上的第一动作杠杆和第二动作杠杆均处于靠近椭圆控制轮的一侧;所述活动投料门为竖向关门状态时,所述椭圆控制轮的椭圆远端点刚好按压第二微动开关的第二动作杠杆;所述活动投料门为向后完全打开状态时,所述椭圆控制轮的椭圆远端点刚好按压第一微动开关的第一动作杠杆;所述第一微动开关和第二微动开关均与单片机控制器电性连接。
15.进一步的,厨余垃圾桶柜、有害垃圾桶柜之间的前部还安装有扬声器,所述扬声器的上下侧还分别安装有第三光电开关和镜头朝下的视觉摄像头;所述第三光电开关能识别是否有物体在视觉摄像头的附近;所述视觉摄像头为openmv h cam摄像头。
16.进一步的,一种智能垃圾分类箱的工作方法:活动投料门的打开方法:单片机控制器控制对应的一个电机,让电机带动椭圆控制轮的椭圆远端点运动到按压第一微动开关的第一动作杠杆,第一微动开关被按压后将信号反馈给单片机控制器,然后单片机控制器发出锁死电机的指令,电机暂停运动,这时根据传动关系,所对应的一个活动投料门刚好为打开状态;活动投料门的关闭方法:单片机控制器控制对应的一个电机,让电机带动椭圆控制轮的椭圆远端点运动到按压第二微动开关的第二动作杠杆,第二微动开关被按压后将信号反馈给单片机控制器,然后单片机控制器发出锁死电机的指令,电机暂停运动,这时根据传动关系,所对应的一个活动投料门刚好为关闭状态;当扔垃圾的人知道所扔垃圾是什么类型时的控制方法;扔垃圾的人自发走到所对应的一个垃圾桶柜前面,这时所对应的一个垃圾桶柜前侧的第一光电开关识别到有人靠近,将信号反馈给单片机控制器,然后单片机控制器单独控制扔垃圾的人前方的一个活动投料门自动打开预定时间;当扔垃圾的人不知道所扔垃圾的类型时的控制方法;这时扔垃圾的人自发的将所要扔的垃圾拿到视觉摄像头的镜头前,这时第三光电
开关识别到视觉摄像头镜头处有物品,这时控制器启动视觉摄像头,视觉摄像头采集到镜头处的垃圾图像资料;然后将采集到的图像进行图像处理,如增强、去噪,阈值分割,对垃圾形成图像进行平面的图像畸变通过标定和补偿算法进行校正,分割出每个面的图像,将同一个垃圾形成图像件左右相机采集的同一个面的图像从垃圾形成图像的中央赤道位置拼接在一起,得到一个面完整的图像,提取灰度、rgb或hsv、纹理等参数,通过三维建模方法区分不同大小垃圾形成图像的图像特征,从而得出垃圾类型;然后控制扬声器播报给扔垃圾的人,最后扔垃圾的人根据扬声器的指示走到所对应的垃圾桶柜前面,这时所对应的活动投料门自动打开预定时间;各垃圾桶柜的垃圾量的监控与控制方法:当某一个垃圾桶柜内垃圾的某一个垃圾桶的垃圾累积量到达预定最高的高度时,第二光电开关识别到所对应的垃圾桶内的垃圾已经装满,这时第二光电开关接通;这时单片机控制器接收到第二光电开关发送过来的信号,之后单片机进一步处理信息用无线通信模块将当前垃圾箱的垃圾情况反馈给垃圾站;与此同时单片机控制器控制与装满垃圾的一个垃圾桶所对应的一个电机,让电机带动椭圆控制轮的椭圆远端点运动到刚好按压第二微动开关的第二动作杠杆,这时根据传动关系,所对应的一个活动投料门刚好为关闭状态,且这时控制器控制所对应的电机锁死;这样已经满了的垃圾桶所对应的活动投料门被强制性锁死,有效避免垃圾溢出。
17.有益效果:本产品上的主要亮点在于垃圾箱上的视觉技术,他可以辅助垃圾分类,当要扔垃圾的人不知道自己的垃圾属于什么垃圾的时候,可以使用视觉分类技术帮助人们快速分辨垃圾类型,让垃圾回到自己的位置。提高了人们的环保意志。
18.垃圾箱上的自动开(关)盖技术让垃圾箱的异味不会随处飘散,解放了人们的双手,在当前新冠阴影仍存的情况下,不碰有污染的地方,间接的也阻断了可能感染新冠的一种途径。自动关盖封闭式垃圾箱让垃圾不露天,间接的美化了城市。
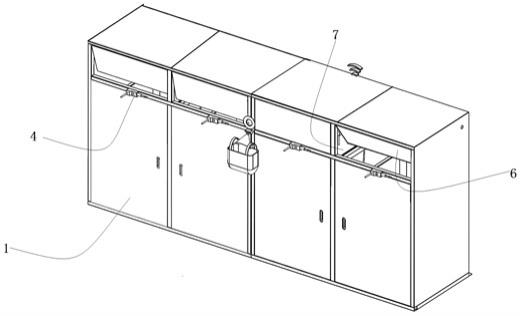
19.附图说明
20.附图1为本装置的整体结构示意图;附图2为本装置的整体结构第二示意图;附图3为本装置的整体结构剖视图;附图4为单个垃圾桶柜的剖开结构示意图;附图5为本方案的整体控制方法示意图;附图6为视觉处理过程示意图;附图7为单个垃圾桶柜的控制电路示意图。
21.具体实施方式
22.下面结合附图对本发明作更进一步的说明。
23.如附图1至7所示的一种智能垃圾分类箱,包括四个并列的垃圾桶柜1,各所述垃圾桶柜1内均设置有一个上端为开放入口15的垃圾桶2;各所述垃圾桶柜1的前部下侧均设置
有柜门3,所述柜门3打开后,所述垃圾桶柜1能从垃圾桶柜1内取出;本垃圾箱的体积比较大(长3m,宽1m,高1.3m);各所述垃圾桶柜1的前部上侧进一步设置有一个矩形投料口7;各所述矩形投料口7处均设置有一个活动投料门6,所述活动投料门6的上端通过第一铰接件80与所述矩形投料口7顶端铰接。
24.每一个垃圾桶柜1的前部均设置有一个第一光电开关4,所述第一光电开关4能识别到有人靠近;这种漫反射光电开关可以在10cm—30cm的距离内感应到物体的到来,接通和断开每一个垃圾桶2的上方均设置有一个第二光电开关14;所述第二光电开关14能识别所对应的垃圾桶2内的垃圾是否装满。第二光电开关14的位置都是在比垃圾桶桶口高一点的地方,所以当垃圾的量到达光电开关的高度时,第二光电开关14光电开关会接通,同时单片机控制器(树莓派,arduino,)会处理第二光电开关14发送过来的信号,之后单片机进一步处理信息将垃圾数量多少用无线通信模块(wifi)将当前垃圾箱的垃圾情况反馈给垃圾站。垃圾站分析数据是否需要出动垃圾车前往所在地处理。
25.四个所述垃圾桶柜1分别为可回收垃圾桶柜1.1、厨余垃圾桶柜1.2、有害垃圾桶柜1.3和其他垃圾桶柜1.4;四个所述活动投料门6分别为第一投料门6.1、第二投料门6.2第三投料门6.3和第四投料门6.4;第一投料门6.1、第二投料门6.2第三投料门6.3和第四投料门6.4的前侧面上分别标识有
‘
可回收物’、
‘
厨余垃圾’、
‘
有害垃圾’和
‘
其他垃圾’。
26.每一个垃圾桶柜1内的侧部均固定安装有一个电机9,还包括一个竖向的椭圆控制轮10,所述电机9的输出轴末端固定连接所述椭圆控制轮10侧壁;且所述椭圆控制轮10的一个焦点f1所述电机9的输出轴轴线重合;将所述椭圆控制轮10的椭圆轮廓上距离所述焦点f1最远的一点记为椭圆远端点10.1;各所述垃圾桶柜1内均设置有一根连杆97;所述连杆97的一端通过第二铰接件11与所述椭圆控制轮10的椭圆远端点10.1处的侧部铰接;所述连杆97的另一端通过第三铰接件5与所述活动投料门6的下端铰接连接;还包括设置在椭圆控制轮10前后侧的第一微动开关12和第二微动开关8,所述第一微动开关12和第二微动开关8上的第一动作杠杆12.1和第二动作杠杆8.1均处于靠近椭圆控制轮10的一侧;所述椭圆控制轮(10)沿所述焦点(f1)顺时针回转一周时,椭圆控制轮(10)的椭圆远端点(10.1)会分别按压第二动作杠杆(8.1)和第一动作杠杆(12.1)一次;所述活动投料门6为竖向关门状态时,所述椭圆控制轮10的椭圆远端点10.1刚好按压第二微动开关8的第二动作杠杆8.1;所述活动投料门6为向后完全打开状态时,所述椭圆控制轮10的椭圆远端点10.1刚好按压第一微动开关12的第一动作杠杆12.1;所述第一微动开关12和第二微动开关8均与单片机控制器电性连接。
27.厨余垃圾桶柜1.2、有害垃圾桶柜1.3之间的前部还安装有扬声器101,所述扬声器101的上下侧还分别安装有第三光电开关999和镜头朝下的视觉摄像头102;所述第三光电开关999能识别是否有物体在视觉摄像头102的附近;所述视觉摄像头102为openmv4 h7 cam。
28.视觉识别技术的大致原理:运用3d机器视觉技术在线获取人们手里垃圾类型;采用openmv4 h7 cam相机和图像采集卡、光源、光电开关(触发相机拍摄)组成的视觉硬件系统;从智能化出发,openmv4 h7 cam相机在光电开关接通时,立即拍照,将图像进行图像处
理,如增强、去噪,阈值分割,对垃圾形成图像进行平面的图像畸变通过适当标定和补偿算法进行校正,分割出每个面的图像,将同一个垃圾形成图像件左右相机采集的同一个面的图像从垃圾形成图像的中央赤道位置拼接在一起,得到一个面完整的图像,提取灰度、rgb或hsv、纹理等参数,通过三维建模方法区分不同大小垃圾形成图像的图像特征,从而得出垃圾类型,最后提醒人们这是什么垃圾。附图6是大致过程。
29.本方案的具体工作原理如下:一种智能垃圾分类箱的工作方法:活动投料门6的打开方法:单片机控制器控制对应的一个电机9,让电机9带动椭圆控制轮10的椭圆远端点10.1运动到按压第一微动开关12的第一动作杠杆12.1,第一微动开关12被按压后将信号反馈给单片机控制器,然后单片机控制器发出锁死电机9的指令,电机暂停运动,这时根据传动关系,所对应的一个活动投料门6刚好为打开状态;活动投料门6的关闭方法:单片机控制器控制对应的一个电机9,让电机9带动椭圆控制轮10的椭圆远端点10.1运动到按压第二微动开关8的第二动作杠杆8.1,第二微动开关8被按压后将信号反馈给单片机控制器,然后单片机控制器发出锁死电机9的指令,电机暂停运动,这时根据传动关系,所对应的一个活动投料门6刚好为关闭状态;当扔垃圾的人知道所扔垃圾是什么类型时的控制方法;扔垃圾的人自发走到所对应的一个垃圾桶柜1前面,这时所对应的一个垃圾桶柜1前侧的第一光电开关4识别到有人靠近,将信号反馈给单片机控制器,然后单片机控制器单独控制扔垃圾的人前方的一个活动投料门6自动打开预定时间;当扔垃圾的人不知道所扔垃圾的类型时的控制方法;这时扔垃圾的人自发的将所要扔的垃圾拿到视觉摄像头102的镜头前,这时第三光电开关999识别到视觉摄像头102镜头处有物品,这时控制器启动视觉摄像头102,视觉摄像头102采集到镜头处的垃圾图像资料;然后将采集到的图像进行图像处理,如增强、去噪,阈值分割,对垃圾形成图像进行平面的图像畸变通过标定和补偿算法进行校正,分割出每个面的图像,将同一个垃圾形成图像件左右相机采集的同一个面的图像从垃圾形成图像的中央赤道位置拼接在一起,得到一个面完整的图像,提取灰度、rgb或hsv、纹理等参数,通过三维建模方法区分不同大小垃圾形成图像的图像特征,从而得出垃圾类型;然后控制扬声器101播报给扔垃圾的人,最后扔垃圾的人根据扬声器的指示走到所对应的垃圾桶柜1前面,这时所对应的活动投料门6自动打开预定时间;各垃圾桶柜1的垃圾量的监控与控制方法:当某一个垃圾桶柜1内垃圾的某一个垃圾桶2的垃圾累积量到达预定最高的高度时,第二光电开关14识别到所对应的垃圾桶2内的垃圾已经装满,这时第二光电开关14接通;这时单片机控制器接收到第二光电开关14发送过来的信号,之后单片机进一步处理信息用无线通信模块将当前垃圾箱的垃圾情况反馈给垃圾站;与此同时单片机控制器控制与装满垃圾的一个垃圾桶2所对应的一个电机9,让电机9带动椭圆控制轮10的椭圆远端点10.1运动到刚好按压第二微动开关8的第二动作杠杆8.1,这时根据传动关系,所对应的一个活动投料门6刚好为关闭状态,且这时控制器控制所对应的电机9锁死;这样已经满了的
垃圾桶2所对应的活动投料门6被强制性锁死,有效避免垃圾溢出。
30.此外,本方案还有gps定位模块:gps模块+单片机(树莓派,arduino)+无线通信模块(wifi),有时候,人们手上有垃圾,出于环境卫生意志,会暂时的把手上的垃圾拿在手上,这是需要到附近找一个垃圾桶,但有又不知道垃圾桶的具体位置,所以,在这里加了gps定位系统,这个东西可以让手机导航快速的找到垃圾箱,方便了人们找不到垃圾箱的麻烦,同时gps模块定位位置信息也通过单片机处理再到无线通信模块发送给垃圾站。监控垃圾箱的位置信息,垃圾车司机也可以通过手机定位快速找到垃圾箱的位置。
31.垃圾量的监控/ gps定位+单片机(树莓派,arduino)+无线通信模块(wifi)实现方式:这个过程中,通信是最主要的,通信需要向垃圾站发送垃圾箱内部的垃圾量和位置信息,这里使用的无线通信技术是wifi,通过城市里大量的5gwifi网络实现信号的传送和接收。
32.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1