一种狭小空间使用的智能化装卸运输一体车的制作方法
1.本发明涉及智能化运输技术领域,具体来说是一种狭小空间使用的智能化装卸运输一体车。
背景技术:
2.随着城市化进程的不断推进,中国乃至世界范围内的基建项目都呈现飞速发展的态势,建筑及装潢产生的垃圾日益增多。这些建筑垃圾大多会堆积在城市小区、街道等狭小空间地域的临时集散地。目前其实际转运装载往往是采用铲车和厢式自卸卡车联合作业的方式,由铲车铲起建筑垃圾,倾倒在卡车车厢里运输到垃圾站自行倾卸。铲车和卡车配合作业需占用较大的联合作业空间,在小区内作业时往往堵住了大部分道路,会影响其他车辆和行人的通行;同时利用铲车和卡车配合作业,设备的使用成本较高,铲车和卡车同时作业,产生的时间成本和管理成本也随之上升,且铲车和卡车在作业的过程中,不易同步配合,完全靠两车司机间口头的喊话沟通,配合安全环节不合理不严密,且作业现场无法做到封闭作业,不时第三者的强制穿行还偶有发生,容易出现施工作业中与人身、设备的以及不特定第三者相关的事故;铲车每次的铲装、倾倒作业都由铲车司机来操作完成,面对一大堆的建筑垃圾,持续劳动时间长更会面临在拥堵交通的压力下,匆忙施工,容易忙中出错,工作压力大,劳动强度高;铲车人工倾倒,在时间、效率多种因素的要求下难以做到轻拿轻放式的装载强度,因此,受建筑垃圾较大载荷的冲击不可避免,长期存在会使得厢式卡车底盘、车厢侧壁、底板都容易损坏。人工装载布放位置的不均匀性长期存在,又会影响卡车底盘行驶系统的设备寿命和行驶中的安全性。对卡车设备完好率、出动率考核都带来隐患和挑战;由于一些作业死角,铲车不时需要卡车调整位置,甚至侧方移动、掉头来实现,这在小区、街道狭小空间里操作难度大,有时几乎无法实现。既增加难度又增加压力还增加风险。
技术实现要素:
3.本发明的目的在于解决现有技术的不足,提供一种装卸运一体化专用作业车将铲车、卡车联合作业功能集成于一身,设备利用率提高,同时解决小区、街道等狭小作业空间两车作业的不方便、不安全的难题。
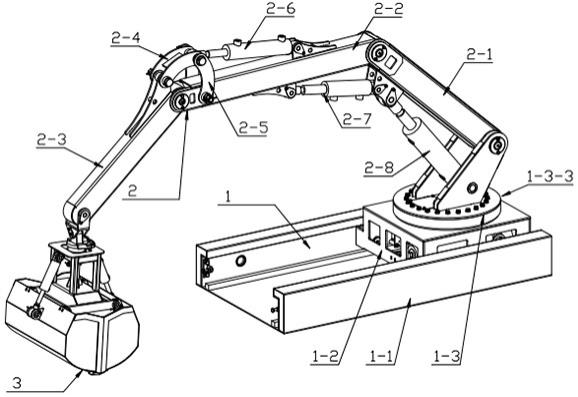
4.为了实现上述目的,本发明设计一种狭小空间使用的智能化装卸运输一体车,包括横向设置的基座,基座内设有轨道;移动平台,设置于基座内,能沿轨道横向移动;臂架,安装在移动平台上,所述臂架为四臂结构,连接臂、大臂、中臂和小臂采用销轴依次首尾连接,第一推杆一端孔铰接装在小臂尾部耳板上,第二推杆一端孔铰接装在中臂上部耳板上,第一推杆和第二推杆各自的另一端孔,与第一驱动油缸活塞杆一端耳板孔同轴安装在一起,第一驱动油缸缸筒耳板孔与中臂上方的耳座通过所配销轴铰接安装,第二驱动油缸活塞杆耳板孔与中臂下方耳座孔用销轴铰接安装,其缸筒耳板孔与采用大臂下方双孔耳座前部的孔用销轴铰接安装,第三驱动油缸活塞杆耳板孔与大臂双孔耳座后部孔用所配销轴铰接安装,其缸筒耳板孔与连接臂采用销轴铰接安装;抓斗,与臂架连接。
5.本发明还具有如下优选的技术方案:在某一优选实施例中,所述移动平台还包括回转支架和回转驱动机构,臂架安装在回转支架上,回转驱动机构用于驱动回转支架和臂架旋转。
6.在某一优选实施例中,所述抓斗包括抓斗支架、回转液压马达和手爪,抓斗支架上方孔位安装万向轴,万向轴是双向叉结构和回转轴构成的总成,用于实现水平回转和前后左右的转动,因此为适应各方向角度的万向轴机构,回转液压马达法兰安装固定在抓斗支架内,用于驱动回转动作,两个手爪分别用配套的销轴铰接装在抓斗支架下侧耳座上,两个抓手液压缸的缸筒耳板安装在抓斗支架的上方两个耳座上,其活塞杆耳板安装在手爪的斗外的耳座上,均为所配销轴铰接配合。
7.在某一优选实施例中,所述基座、移动平台、臂架和抓斗组成的起重臂机构,横向偏置安装在车辆上。
8.发明的有益效果本发明所提供的一种狭小空间使用的智能化装卸运输一体车的优点包括但不限于:本发明设计搭载的有四臂臂架旋转折叠起吊臂既保证了展开作业的足够空间,又保证折叠收拢后整车外廓尺寸的足够紧凑。能够方便穿行于小区和街道等狭窄道路,并可以在适用狭小作业空间里充分、自如地展开;本发明设计的可水平移动回转支架,能够使起重臂折叠后外形能够充分纳入车辆高、宽方向的外廓尺寸,同时作业时通过选择回转支架所在的水平位置来增加作业覆盖范围。
附图说明
9.图1示例性示出了本发明的上装整体结构示意图;图2示例性示出了本发明的回转支架的结构示意图;图3示例性示出了本发明的抓手的结构示意图;图4示例性示出了本发明的连接法兰的结构示意图;图5示例性示出了本发明的移动平台的结构示意图;图6示例性示出了本发明的固定平台的结构示意图;图7示例性示出了本发明的竖直平面壁挂式布置的结构示意图;图8示例性示出了本发明滑动平台的臂展的作业区域示意图;图中:1.基座2.臂架3.抓手1
‑
1.固定平台1
‑
2.移动平台1
‑
3.回转支座1
‑3‑
1.回转支架1
‑3‑
2.连接法兰1
‑3‑
3.回转驱动机构2
‑
1.大臂2
‑
2.中臂2
‑
3.小臂2
‑
4.第一推杆2
‑
5.第二推杆2
‑
6.第一驱动油缸2
‑
7.第二驱动油缸2
‑
8.第三驱动油缸3
‑
1.手爪3
‑
2.抓手液压缸3
‑
3.回转液压马达3
‑
4.万向轴3
‑
5.销轴。
具体实施方式
10.下面结合附图和实施例,对本发明所采用的技术方案做进一步的说明,以便本领域技术人员更好的了解本发明所采用的技术方案。
11.参见图1,通过介绍本发明所提供的一种狭小空间使用的智能化装卸运输一体车的具体实施例的组装方式,对其结构作进一步的说明。
12.首先,抓手3的装配。抓斗支架上方孔位可以安装万向轴3
‑
4,万向轴3
‑
4是双向叉
结构和回转轴构成的总成,可实现水平回转和前后左右的转动,因此为适应各方向角度的万向轴3
‑
4。回转液压马达3
‑
3的法兰安装固定在抓斗支架<件号3内,可驱动回转动作。两个手爪3
‑
1分别用配套的销轴3
‑
5铰接装在抓斗支架下侧耳座上,两个抓手液压缸3
‑
2的缸筒耳板安装在抓斗支架上方两个耳座上,其活塞杆耳板安装在手爪3
‑
1的斗外的耳座上,均为所配销轴3
‑
5铰接配合。
13.其次,臂架2的部件装配。大臂2
‑
1、中臂2
‑
2、小臂2
‑
3三件通过所配销轴3
‑
5顺序依次首尾连接;第一推杆2
‑
4按图示一端孔铰接装在小臂2
‑
3尾部耳板上、第二推杆2
‑
5按图示一端孔铰接装在中臂2
‑
2上部耳板上;第一推杆2
‑
4和第二推杆2
‑
5各自的另一端孔,与第一驱动油缸2
‑
6活塞杆一端耳板孔同轴安装在一起;第一驱动油缸2
‑
6的缸筒耳板孔与中臂2
‑
2上方的耳座通过所配销轴3
‑
5铰接安装。第二驱动油缸2
‑
7活塞杆耳板孔与中臂2
‑
2下方耳座孔用所配销轴3
‑
5铰接安装,其缸筒耳板孔与采用大臂2
‑
1下方双孔耳座前部的孔用所配销轴3
‑
5铰接安装。第三驱动油缸2
‑
8活塞杆耳板孔与大臂2
‑
1双孔耳座后部孔用所配销轴3
‑
5铰接安装;其缸筒耳板孔暂时自由放置。
14.然后,进行基座1的部件安装。将移动平台1
‑
2插入固定平台1
‑
1槽内,移动平台1
‑
2的车轮置于固定平台1
‑
1内事先安装好的轨道上,在移动平台1
‑
2内有油泵驱动车轮可使移动平台1
‑
2沿着轨道来回行驶移动。移动平台1
‑
2的两侧凸缘插入固定平台1
‑
1内的槽钢梁内,在移动平台1
‑
2滑动到任何位置,都起到可以抗翻转力矩作用。回转支架1
‑3‑
1通过一圈若干套数量的螺栓、螺母、弹簧垫圈与法兰1
‑3‑
2上圈(内圈)联接、法兰1
‑3‑
2下圈(外圈)与回转驱动机构1
‑3‑
3通过另一圈若干套数量的螺栓、螺母、弹簧垫圈联接。回转驱动机构1
‑3‑
3采用带齿轮输出轴的油马达,其输出轴上的齿轮与法兰1
‑3‑
2上圈(内圈)的内齿圈啮合,回转驱动机构1
‑3‑
3的壳体(马达壳体支架)通过螺栓联接固定在移动平台1
‑
2内。马达转动,啮合齿圈转动带动上圈(齿轮圈)和安装在上面的回转支架1
‑3‑
1一起转动。
15.再然后,将基座1、臂架2、抓手3三个部件通过销轴3
‑
5联接成为一个上装整体。基座1、臂架2间联接还包括前述第三驱动油缸2
‑
8暂时自由状态放置的缸筒耳板孔与回转支架1
‑3‑
1下部座孔用所配销轴3
‑
5同轴联接。
16.接下来将上装整体和车厢安装到二类底盘车架上。上装整体与底盘车架联接是通过将固定平台1
‑
1下板的孔和底盘副车架上孔用螺栓、螺母、垫圈、弹簧垫圈联接紧固来实现。车厢与底盘车架联接通过同样方法实现。
17.最后将液压、电气、控制系统安装到车辆上,并导入软件程序,并调试至合格。
18.至此完成一种狭小空间使用的智能化装卸运输一体车的具体实施例的所有安装、调试。
19.本发明的所采用的方案通过可移动的回转支座1
‑
3,在滑动平台上可以左右两处极限位置间移动,解决了一般现有的起重机构的固定回转支座的以下缺陷:固定回转支座虽然简单、可靠、经济,但存在作业范围左右区不一样,恰巧盲点的位置时需要通过移动车辆或掉头的方式来消弭,这样需要重新驻车准备,存在效率低的弊端。有时,空间狭小不允许做移动车辆或掉头的情况下就不能作业了。本发明方案的可移动回转支座1
‑
3,解决了传统机构左右作业范围不一样带来的可能的盲点盲区问题,改善了臂展覆盖区域,避免了重新驻车准备的工作,节约了时间,增加了机器设备的适用性。支座还可以采用回转方式移动到另一端的,如果基座1是平面竖直布置,转台是直角转弯布置,从竖直平面引出,使回转平
面回到水平面内。基座1的移动平台1
‑
2呈“挂壁式”布置同样实现本发明的回转支架1
‑3‑
1可沿导轨移动的原始设计意图;抓手3的移动回转平台可以前置式布置在驾驶室和货厢之间,也可以后置式布置在货厢后面,抑或采用中间布置方式布置在货厢中部,以上所述都属于本发明的设计思想范畴。
20.本发明所述提供的一种狭小空间使用的智能化装卸运输一体车的优选实施例还可以具备以下功能:1、自装卸的功能现有市场上城市建筑垃圾清运车辆是铲车加厢式自卸卡车的组合,自卸卡车负责运输和自卸,而装载必须要铲车来配合完成。两车职能单一,不是一体化的专用车辆。本发明的产品专门解决了将两车装载和运输、自卸功能一体化、集成化,成为一种多功能的专用作业车辆。
21.2、均载装载的功能本发明产品的上装起重抓手(抓斗)可以由设计的控制程序实现按预设定意图模式和规律顺序堆叠、摆放功能。对车辆的底盘和车厢的装载受力起到选择接近最符合物料特性、道路情况、产品寿命多因素考量下的装载方案。
22.3、紧凑收放的四旋转臂抓手结构的功能表现在以下几方面:多臂旋转折叠的起重臂架2结构。相对常用的直臂式伸缩结构的起重臂架,本发明产品采用旋转折叠臂结构,通过设计使结构做得尽可能的在收起时更加紧凑,不占用太大的车辆外廓尺寸的空间。由于适用于小区、街道的狭窄路面行驶和狭小空间作业,且又要保证足够的臂展尺寸空间,因此采用4旋转臂折叠的折臂式结构形式。目前市场上有的是3旋转臂式,没有4旋转臂式。本产品采用4旋转臂式方案的创造性设计可使作业臂展增加1米以上,具有相当的性能提升优势;抓斗回转机构在水平面内可进行旋转,腕关节设计也可以在空间其他方向回转,四个旋转臂纵向对称中心面可以是在同一平面内的左右中心对称机构的布置方式,也可以采用四个旋转臂纵向对称中心面是在平行的平面内的侧偏布置的方式。移动回转平台的回转机构可以采用马达驱动齿轮与齿圈啮合或者油缸驱动齿条与齿圈啮合等方式进行配合。
23.起重臂机构横向偏置的折叠功能。一般随车式起重机上装无论前置或后置式,大多都是回转支座在水平面内是布置在横向中轴线上的,这种结构势必造成上装收齐后,布置空间利用情况不好,整体尺寸难以做到极致的紧凑。本发明产品采用横向偏置的折叠起重臂机构,收起时,横向空间尺寸利用充分,不突破底盘的外廓包容尺寸。对垃圾收集车采用抓手的起重臂布置多是纵向布置,本发明采用横向布置方式是对紧凑设计和适用狭小空间使用场合发明目的的重要体现。回转支架1
‑3‑
1可以沿着固定平台1
‑
1滑移到偏置的一侧布置。
24.与一般直臂式伸缩起重臂和一般常用的折叠起重臂不同,本发明的四旋转臂臂架结构通过贝壳式抓斗设计既可以实现大载荷(夹持力)工况需求又可以满足大斗容工况需求的机械手特性。贝壳式的机械手的好处是可以有效应对建筑垃圾为代表的被抓取物料的不确定性,能够兼顾水泥砖块等较大块状垃圾包也能有效应对砖块石子堆,甚至堆放的砂灰等中小颗粒状的散料包容。解决了大小形状不特定物料抓取难以兼顾难题的同时,还解决和大斗容抓斗机械手在收叠时纳入外廓限制尺寸的难题,使清运车可以实现穿行于城市道路狭小空间区域的能力,并且解决了在这种产品工况和设备尺寸限制条件下,相对采用
传统三旋转臂等臂架方案布置不下和臂展空间不足的问题。
25.4、免移动、掉头的功能本发明车辆的上装,抓料抓手及其起重臂的回转支座1
‑
3是安装在一个可按需要水平移动,并在行驶和作业时可靠固定的滑动平台上的。这样的特别设计是以往随车起重机械所没有过的。这一重大发明创新的好处是使得车辆在水平作业范围内可以增加到左右一样,尽可能减少作业死角盲区。一般非本发明设计的随车起重机或自卸卡车配合铲车的方案,会通过侧方移位和掉头重新驻车,腾出作业死角位置,这样的操作麻烦且容易出现安全问题,尤其随车吊的重新驻车是非常麻烦和费时的。本产品发明的上装可沿着滑动平台导轨左右移动机构,解决了上述问题,尤其是狭小作业空间内的侧方移位、调头和重新驻车动作。使得作业效果比以前的方案和设备安全、高效、可靠,而且作业臂展覆盖范围得到提升。参见图8,传统的回转支座在a点,作业覆盖区域为以a为圆心,以为臂展为半径的在中间位置的圆内。如果采用偏置于b点,作业覆盖区域为以b为圆心为臂展为半径的上方(车右侧)的位置的虚线圆内,对下方(车左侧)的相对覆盖范围较小,可以通过将回转支座1
‑
3移动到在c点,下方(车左侧)覆盖范围得到改善。整个车辆在不对车辆移位的情况下,将整机作业覆盖范围扩大到三个圆的并集范围内。
26.5、简单化遥控作业的功能本发明设计的作业装置的电液控制机构除了设有车体随附式操作机构外,还设计有远端遥控的机构。远端遥控机构解决了车体随附式操作机构由于位置视角固定的局限性带来的盲区缺陷。可以使操作者灵活机动的在各个合适的位置进行观察和操作。而且本发明产品的遥控控制端是专门设计的简化操作机构,与现有同类产品采用多手柄操作的遥控器的复杂操作需要专门培训后才能胜任不同,本发明产品的遥控操作机构采用单手柄辅以简单确认按钮,或触摸式反馈屏的拖曳、点击动作即可能实现满足精度要求的动作操作。如手指触摸点击、滑动、拖曳操作方式的遥控器,通过类似与操作手机的方式,较目前现有市场上手柄动作为输入动作的操纵机构更加简单、直观。或是如三坐标测量仪手柄式的操作方式,更趋简单,能够实现单手操作动作。较目前现有市场上双手柄、三手柄的操纵机构更加简单。够减轻作业时操作者的精神压力和劳动强度,确保作业安全。
27.6、安全监控作业的功能本发明通过采用在车辆货厢的上方以及面对作业机构合适位置处布置有两个以上的摄像头,起到监控操作过程和可实时视频观察操作的作用。本发明通过提供给控制系统实现视频同步显示在遥控控制器上,供操作者安全监控。还可以将监控模块在app端共享,实现手机端就选择能观察监控模块中某个摄像头视角下的场景,可以让其他人以观察员身份参与监控观察,并反馈示警,甚至有权限情况下能够介入急停,中止危险工况。将监控显示画面与遥控器显示屏共享作为操纵监控端作业过程的视频信息可以贮存在设备存储其中,以供一段时间后的查询和追溯。
28.7、均布载荷监控功能货厢底部设有重力传感器,可以测量和判断装货后的载荷均布情况以及水平面内货物重心位置。对车辆超载危险和重载侧偏倾覆危险可以做到程序要求的预警和提示功能,甚至是锁止继续装载和运输作业的功能,直到危险解除。
29.8、模糊控制系统功能
本发明的控制系统采用“黑箱”原理,简化操作者的控制输入动作的复杂程度。
30.起重机构有回转支座1
‑
3的移动和回转、大臂2
‑
1举升、中臂2
‑
2举升、小臂2
‑
3举升、抓斗回转、抓斗抓取七个执行动作,分别由各自机构的驱动油缸来驱动。控制动作元器件数量多,结构复杂。除去回转支座1
‑
3水平移动和抓斗的回转及抓取动作不算以外,移动抓手3(抓斗)手腕(万向轴3
‑
4)从某一空间坐标点到另一空间坐标点的路径有无数条,可通过回转支座1
‑
3的回转、大臂2
‑
1举升、中臂2
‑
2举升、小臂2
‑
3举升的四个动作组合完成,但各自动作时机、幅度都有若干种组合方式,靠操作人员直接控制这些动作原件来精准实现难度较大,需要专业培训反复练习后才能胜任,并且操作者注意力高度集中,精神紧张,容易出现误操作。本发明设计一种控制系统,通过逻辑算法程序,实现只需要关注抓手3手腕起点到终点的位置,通过一个手柄的三轴方向拨动和旋动即可实现直接精准控制。或者是在触摸屏上直接手动连接画线,就实现上述移动控制的功能。具体各机构原件的动作幅度、时机的参数和组合方式由程序来运算和执行。操作者无需介入“黑箱”内的运算,仅需要点击目标位置,或输入坐标点坐标值,系统通过算法优化后自动驱动各执行元器件按优化参数动作,无需操作者来人工决定各机构的动作参数手动操作,实现“黑箱”模式的控制,实现每一次抓取动作的精准就位。
31.本发明设计开发的程序针对料堆上一大堆的垃圾物,由于物料堆放有一定范围呈料场式布置,抓斗抓取是间歇式的工作动作,每次抓取物料需要步进式移动进给的。开发的程序有手动进给模式和自动进给模式。自动进给模式可以是预设定的几种模式来选,也可以采用智能优化模式。智能优化模式是在手动操作或输入坐标方式输入料场的几个边界点或人工操作位置后,系统根据算法执行最优的自动抓取和自动进给模式来自动作业。这期间,操作人员只需要做好观察监控和随时紧急制动准备防止意外事故的准备即可。可以避免连续长期作业带来疲劳和懈怠,能够更加集中精力保证设备运行和操作的安全。同样布料排放到货厢里也是一样的做法。做到对底盘车架的均匀受力。在完成自动取布料模式设定工作后,对有遗漏的和特殊情况导致不能自动抓取完成的物料再进行有限手动的操作完成可以通过输入边界控制点或边界作业区域,进入智能化自动作业模式,自动排序抓取料和布料。中间过程的规律的重复动作带来的简单且长时间易使人疲劳的操作动作由程序来执行实现。
32.本发明创新设计一种狭小空间使用的智能化装卸运输一体车,可以是在专用车二类底盘上来改装,也可以用半挂车底盘改装.对半挂车底盘改装的,无论上装整体是安装在了牵引车头的底盘上,还是安装在了挂车底盘上,都是在本发明的设计思想范畴内简单的不同物理位置的布置变形,都属于本发明的创新思想范畴。
33.本发明创新设计一种狭小空间使用的智能化装卸运输一体车。不论上装整体是安装在底盘的前部还是后部,都只是简单的物理位置的简单变化,都属于本发明的创新思想范畴。
34.本发明创新设计一种狭小空间使用的智能化装卸运输一体车。不仅可以用于建筑垃圾,邮政行李包裹、农业、包装的工业原料、块况物料等等使用场合、或其他自装自运的车辆产品均能适用,都属于本发明的创新思想范畴。
35.以上所述,仅为此发明的具体实施方式,但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案和新型的构
思加于等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1