可分类回收垃圾的集成装置的制作方法
1.本发明涉及垃圾分类技术领域,特别地涉及一种可分类回收垃圾的集成装置,尤其是家庭用可分类回收垃圾的集成装置。
背景技术:
2.垃圾分类可提高垃圾的资源价值和经济价值,具有社会、经济、生态等多方面的效益。多个重点城市都着手加快垃圾分类的各项环节建设。在以家庭为单位的垃圾回收中,仍然需要在家中将各类垃圾丢入垃圾袋中,并将垃圾袋转移至指定的地点。因此在转移时,很多人出于便捷的考虑并未将垃圾与垃圾袋进行分离而是直接将其投入指定地点,因此垃圾袋的使用对于垃圾分类而言是一大阻碍。
技术实现要素:
3.本发明提供一种可分类回收垃圾的集成装置,用于解决现有技术中的上述问题。
4.本发明提供一种可分类回收垃圾的集成装置,包括可转移的箱体,所述箱体中分别设置在有显示单元、控制单元和用于容纳垃圾的容纳单元;
5.所述容纳单元至少有四个,所述容纳单元构造为所述箱体中的腔室,所述腔室的上方对应地设置有自动开闭式盖体,所述腔室的底部对应地设置有可开闭式密封底板;
6.所述控制单元包括:
7.开闭控制装置,所述开闭控制装置分别与所述自动开闭式盖体和所述可开闭式密封底板相连,用于使所述自动开闭式盖体和所述可开闭式密封底板分别打开或关闭;以及
8.显示控制装置,所述显示控制装置与所述显示单元相连,用于控制所述显示单元显示信息。
9.在一些实施方式中,所述可开闭式密封底板构造为充气式密封底板。
10.在一些实施方式中,所述可开闭式密封底板的第一端与相应的腔室的底部铰接,所述可开闭式密封底板的第二端与对应腔室的外壁上的扣合机构相连。
11.在一些实施方式中,所述开闭控制装置包括底板控制手柄,所述底板控制手柄分别与所述扣合机构和所述可开闭式密封底板的第一端的驱动机构相连,以使所述可开闭式密封底板关闭或开启。
12.在一些实施方式中,所述开闭控制装置还包括底板联动装置,所述底板联动装置与每个所述可开闭式密封底板对应的底板控制手柄相连,用于使所述可开闭式密封底板同时开启或同时关闭。
13.在一些实施方式中,所述开闭控制装置还包括盖体开闭控制器,所述盖体开闭控制器与所述自动开闭式盖体上的感应装置相连。
14.在一些实施方式中,所述腔室的底部对应地设置有重量传感器,所述重量传感器与所述显示控制装置相连。
15.在一些实施方式中,所述箱体包括隔板以及设置在所述隔板底部的承载体,所述
腔室设置在所述承载体中并关于所述隔板对称。
16.在一些实施方式中,所述显示单元构造为所述隔板的上端的显示屏。
17.在一些实施方式中,所述隔板的上部设置有贯穿其厚度方向的通槽,所述通槽用于转移所述箱体时的握持部。
18.与现有技术相比,本发明的优点在于:在箱体中构造用于容纳垃圾的腔室,垃圾可直接通过其上方的自动开闭式盖体投入腔室中,待腔室中的垃圾达到一定数量后,通过将箱体转移至指定地点后,将腔室的底部对应的可开闭式密封底板打开,即可将垃圾倒入指定地点,因此在垃圾收集和处理过程中均可避免垃圾袋的使用,从而对垃圾分类起到积极的促进作用。
附图说明
19.在下文中将基于实施例并参考附图来对本发明进行更详细的描述。
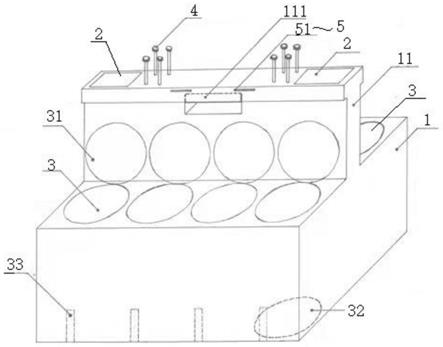
20.图1是本发明的实施例中可分类回收垃圾的集成装置的立体结构示意图;
21.图2本发明的实施例中可开闭式密封底板的剖视图;
22.图3是本发明的实施例中用户操作按钮与手柄的结构示意图;
23.图4是本发明的实施例中联动拨片的俯视图;
24.图5是图4在a
‑
a处的剖视图;
25.图6是本发明的实施例中转盘的俯视图;
26.图7是图6在b
‑
b处的剖视图。
27.附图标记:
[0028]1‑
箱体;11
‑
隔板;111
‑
通槽;12
‑
承载体;
[0029]2‑
显示单元;
[0030]3‑
腔室;31
‑
自动开闭式盖体;
[0031]
32
‑
可开闭式密封底板;321
‑
第一环形孔;322
‑
第二环形孔;323
‑
充气孔;324
‑
可膨胀体;325
‑
三通阀;
[0032]
33
‑
扣合机构;331
‑
扣合板;332
‑
扣合钩部;333
‑
扭力弹簧;334
‑
顶推凸起;
[0033]
34
‑
驱动机构;
[0034]4‑
底板控制手柄;41
‑
手柄;
[0035]
42
‑
开启控制推杆;421
‑
第一弹簧;422
‑
楔形块;
[0036]
43
‑
闭合控制机构;431
‑
第二弹簧;432
‑
第三弹簧;433
‑
旋转卡轴;433a
‑
上轴;433b
‑
下轴;434
‑
行走推杆;435
‑
齿条;436
‑
第四弹簧;
[0037]
44
‑
牵引绳;45
‑
用户操作按钮;46
‑
杠杆机构;47
‑
缺口;
[0038]5‑
底板联动装置;51
‑
驱动片;52
‑
联动拨片;521
‑
第二方孔;522
‑
齿片;522a
‑
楔形薄齿片;522b
‑
厚齿片;
[0039]
53
‑
转盘;531
‑
第一方孔;532
‑
偏心孔。
具体实施方式
[0040]
下面将结合附图对本发明作进一步说明。
[0041]
如图1和2所示,本发明提供一种可分类回收垃圾的集成装置,包括可转移的箱体
1,箱体1中分别设置在有显示单元2、控制单元和用于容纳垃圾的容纳单元。
[0042]
其中,容纳单元至少有四个,从而能够满足日常家庭中产生的厨余垃圾、可回收垃圾、有害垃圾和其他垃圾的收集。具体地,容纳单元构造为箱体1中的腔室3,如图1所示的实施例中,设置有8个腔室3。可以理解地,腔室3的数量可以根据需要进行设置。通过将腔室3构造为箱体1中的腔室,使二者能够形成为一个整体,从而便于转移箱体1,以避免垃圾袋的使用。
[0043]
具体地,腔室3的上方对应地设置有自动开闭式盖体31,腔室3的底部对应地设置有可开闭式密封底板32,通过打开自动开闭式盖体31,可将垃圾投入对应的腔室3中;在投放结束后,自动开闭式盖体31可自动关闭。
[0044]
并且,在将箱体1转移至指定地点后,通过打开可开闭式密封底板32,可使对应的腔室3中的垃圾排出至指定地点,待垃圾排出后从底部对腔室3进行清洗和消毒,随后将可开闭式密封底板32关闭。因此在收集和转移垃圾的过程中无需使用垃圾袋,从而能够对垃圾分类起到积极的促进作用。
[0045]
在一些实施例中,可开闭式密封底板32构造为充气式密封底板。
[0046]
具体地,如图2所示,可开闭式密封底板32上设置有用于与相应的腔室3的底端配合相连的第一环形孔321和第二环形孔322,第一环形孔321由可开闭式密封底板32的端部延其轴向延伸,第二环形孔322由第一环形孔321的底部延其轴向延伸,第一环形孔321的底部设置有能够完全覆盖第二环形孔322端面的可膨胀体324,第二环形孔322的侧部设置有充气孔323,通过充气孔323向第二环形孔322通入气体可使膨胀体324膨胀,从而使第一环形孔321和相应的腔室3密封。
[0047]
进一步地,充气孔323通过三通阀325气源(未示出)相连,三通阀325和气源与开闭控制装置的传感器相连,当可开闭式密封底板32关闭后,开闭控制装置的传感器向气源及三通阀325发出信号,三通阀325使充气孔323与气源导通,气源通过充气孔323向第二环形孔322充气,从而使可膨胀体324膨胀,由此可使可开闭式密封底板32与相应的腔室3密封连接,三通阀325在充气一定时间关闭后,使充气孔323与气源断开,可使可开闭式密封底板32与相应的腔室3保持密封连接。当可开闭式密封底板32关闭时,开闭控制装置的传感器向三通阀325发出信号,三通阀325使充气孔323与大气导通以进行放气,从而可膨胀体324收缩,可使可开闭式密封底板32打开。
[0048]
控制单元包括开闭控制装置和显示控制装置。开闭控制装置分别与自动开闭式盖体31和可开闭式密封底板32相连,用于使自动开闭式盖体31和可开闭式密封底板32分别打开或关闭。显示控制装置与显示单元2相连,用于控制显示单元2显示信息。
[0049]
在一些实施例中,可开闭式密封底板32的第一端与相应的腔室3的底部铰接,可开闭式密封底板32的第二端与对应腔室3的外壁上的扣合机构33相连。
[0050]
开闭控制装置包括底板控制手柄4,底板控制手柄4与扣合机构33相连,底板控制手柄4分别与扣合机构33和可开闭式密封底板32的第一端的驱动机构34相连,以使可开闭式密封底板32关闭或开启。
[0051]
通过操作底板控制手柄4,可使可开闭式密封底板32的第二端与相应的腔室3外壁上的扣合机构33脱离连接,从而可开闭式密封底板32沿其与腔室3的铰接处向下旋转而使腔室3打开,此时腔室3中的垃圾可排出。
[0052]
在一些优选的实施例中,扣合机构33包括扣合板331,扣合板331与腔室3的外壁铰接,扣合板331可沿其与腔室3的铰接处旋转,并且二者的铰接处设置有扭力弹簧333,通过扭力弹簧333使扣合板331保持竖直状态。扣合板331的底部设置有扣合钩部332,扣合钩部332用于与可开闭式密封底板32的第二端扣合连接。扣合板331的侧部位于扣合钩部332上方设置有顶推凸起334,扣合板331保持竖直状态时,顶推凸起334抵靠在腔室3的外壁上,从而保证扣合板331不会旋转超过预定位置。
[0053]
底板控制手柄4包括手柄41、开启控制推杆42、闭合控制机构43和牵引绳44。开启控制推杆42设置在扣合机构33的同侧,闭合控制机构43设置在扣合机构33的异侧。
[0054]
开启控制推杆42上套设有第一弹簧421,开启控制推杆42的底部设置有楔形块422,扣合板331处于竖直状态时,楔形块422与扣合板331的上端相抵靠。开启控制推杆42的上端与牵引绳44的其中一端相连,当通过牵引绳44推动开启控制推杆42向下运动时,楔形块422推动扣合板331顺时针转动,从而使扣合钩部332与可开闭式密封底板32的第二端脱离,则可开闭式密封底板32打开。可开闭式密封底板32打开后,扣合板331在扭力弹簧333的作用下沿逆时针旋转至竖直状态,开启控制推杆42则在第一弹簧421的作用下向上恢复至初始状态。
[0055]
闭合控制机构43包括与牵引绳44的另一端相连的第二弹簧431、第三弹簧432、旋转卡轴433、行走推杆434和齿条435。行走推杆434上套设有第四弹簧436。第三弹簧432与旋转卡轴433相连,旋转卡轴433与行走推杆434相连,齿条435设置在行走推杆434的底部。齿条435与可开闭式密封底板32的第一端的驱动机构34相连。驱动机构34可以是齿轮,齿条435与齿轮相啮合。
[0056]
旋转卡轴433包括上轴433a和下轴433b,二者通过倾斜的齿啮合。行走推杆434与下轴433b的下端相连。当上轴433a受到推力向下运动时,上轴433a和下轴433b之间旋转使其齿错开;反之,当上轴433a再次向下运动时,上轴433a和下轴433b之间再次旋转则其齿相啮合,从而下轴433b向上运动,并带动行走推杆434向上运动,由此可使齿条435和齿轮之间产生相对运动,从而使可开闭式密封底板32沿顺时针转动,由此可关闭相应的腔室3。
[0057]
手柄41构造为l形结构,第三弹簧432与第二弹簧431并排设置,第三弹簧432与手柄41的下端相连,且第二弹簧431与手柄41的下端之间具有一定的距离。手柄41被按下时,则手柄41先与第三弹簧432接触,然后再与第二弹簧431接触并压缩第二弹簧431,从而可驱动牵引绳44,使其推动开启控制推杆42向下运动时,扣合钩部332用于与可开闭式密封底板32的第二端脱离,则可开闭式密封底板32打开;手柄41再次被按下时,上轴433a和下轴433b之间旋转则其齿相啮合,从而下轴433b向上运动,并带动行走推杆434向上运动,由此可使齿条435和齿轮之间产生相对运动,从而使可开闭式密封底板32沿顺时针转动,则可开闭式密封底板32的第二端与扣合钩部332扣合,由此可关闭相应的腔室3。
[0058]
底板控制手柄4的数量与腔室3的数量一一对应,也就是说,底板控制手柄4分别控制一个可开闭式密封底板32的打开与关闭。
[0059]
进一步地,底板控制手柄4还包括用户操作按钮45,其设置在箱体1的隔板11上用户便于从操作的位置处。如图3所示,用户操作按钮45通过杠杆机构46与手柄41相连,从而起到省力的目的。
[0060]
在一些可选的实施例中,驱动机构34为电机,底板控制手柄4与电机相连,通过电
机的正转和反转带动可开闭式密封底板32顺时针转动和逆时针转动,从而使腔室3封闭或打开。
[0061]
在一些优选的实施例中,开闭控制装置还包括底板联动装置5,通过底板联动装置5可控制多个可开闭式密封底板32同时开启或同时关闭。
[0062]
具体来说,如图1、4、5和6所示,底板联动装置5包括驱动片51、联动拨片52、方轴、转盘53和推杆。驱动片51设置在箱体1上的隔板11上用户便于操作的位置处。驱动片51通过齿轮齿条机构与推杆相连,推杆与转盘53偏心相连。转盘53的中心部位设置有第一方孔531,联动拨片52中心部位设置有第二方孔521,方轴的两端分别设置在第一方孔531和第二方孔521中。
[0063]
如图4和5所示,联动拨片52包括沿其径向延伸的多个齿片52,多个齿片52之间具有间隙。在图4所示的实施例中,齿片52的数量为6个,因此相邻两个齿片522之间的夹角α1为60
°
。具体地,齿片522包括楔形薄齿片522a和厚齿片522b,楔形薄齿片522a和厚齿片522b相连。厚齿片522b的弧度α2为10
°
,上一个齿片522的楔形薄齿片522a和下一个齿片522的厚齿片522b之间的角度α3为30
°
。
[0064]
手柄41上设置有缺口47,齿片52可与缺口47配合。当联动拨片52旋转至楔形薄齿片522a插入缺口47中时,则联动拨片52将多个手柄41进行联动,从而可控制多个可开闭式密封底板32同时开启或同时关闭;联动拨片52旋转至厚齿片522b越过缺口47,使缺口自47位于相邻两个齿片522之间的间隙中,则多个手柄41的联动取消,从而通过手柄41可单独控制每个可开闭式密封底板32的开启或关闭。
[0065]
如图6和7所示,转盘53的中心位置处设置有第一方孔531,如图4和5所示,联动拨片52的中心位置处设置有第二方孔521,转盘53和联动拨片52所在的表面均与箱体1上表面相平行。转轴的两端分别设置在第一方孔531和第二方孔521中,从而转盘53的转动可带动联动拨片52进行转动,从而使联动拨片52的齿片522与缺口47相配合。
[0066]
推杆沿转盘53所在的平面延伸,其与转盘53的偏心孔532相连,因此通过推杆的推动可使转盘53进行旋转。偏心孔532的中心位于转盘53的四分之一象限点处,
[0067]
推杆通过齿轮齿条机构与驱动片51,因此用户拨动驱动片51时,通过齿轮齿条机构使推杆移动,从而使转盘53转动,继而带动联动拨片52转动,从而实现多个可开闭式密封底板32的联动。
[0068]
在一些实施例中,开闭控制装置还包括盖体开闭控制器,盖体开闭控制器与自动开闭式盖体31上的感应装置相连。
[0069]
感应装置可以是感应条或非接触式传感器。
[0070]
盖体开闭控制器包括感应芯片、处理器、驱动电路和电机。当人体任何部位靠近或直接接触感应条的电场感应区域时,感应条能够接收人体的附加的电容信号并将电容信号输出给感应芯片。
[0071]
感应芯片采集感应条输出的电容值信号,并将电容值信号转换为电容值数据向处理器输出;处理器计算出电容值数据变化的特征值后,判断特征值是否大于设定的阈值,若特征值大于设定的阈值则确认人体接近;处理器根据人体接近或离开向驱动电路输出打开信号或关闭信号;驱动电路根据接收的打开信号或关闭信号控制电机驱动自动开闭式盖体31打开或关闭。即判断电容值数据变化的特征值大于设定的阈值时,确认人体接近,处理器
向驱动电路输出打开信号,判断电容值数据变化值的特征值小于设定的阈值时,确认人体离开,处理器向驱动电路输出关闭信号。可见,电容值数据变化的特征值大于设定的阈值时能够确认人体接近,电容值数据变化的特征值小于设定的阈值时能够确认人体没有接近或者离开,处理器根据确认的结果向驱动电路输出打开信号或关闭信号。
[0072]
进一步地,电容值数据变化值的特征值小于设定的阈值,确认人体离开后还包括,延迟第一预设时间后,处理器再向驱动电路输出关闭信号。即确认人体离开后,自动开闭式盖体31不是马上进行关闭,而是延迟一段预设时间(例如五秒),防止意外情况发生。
[0073]
电机用于根据驱动电路的驱动信号驱动自动开闭式盖体31进行翻转,实现自动开闭式盖体31的打开和关闭,电机可以是直流电机。
[0074]
腔室3的底部对应地设置有重量传感器,重量传感器与显示控制装置相连。通过显示控制装置可将重量传感器测得的腔室3中的垃圾的重量显示在显示单元2上。通过重量传感器能够实现垃圾重量的实时监控。
[0075]
箱体1包括隔板11以及设置在隔板11底部的承载体12,隔板11和承载体12构成大致倒t形的结构,以增加稳定性。此外,腔室3设置在承载体12中并关于隔板11对称。如图1所示,隔板11的两侧分别设置有4个腔室3。
[0076]
此外,显示单元2构造为隔板11的上端的plc显示屏。
[0077]
进一步地,隔板11的上部设置有贯穿其厚度方向的通槽111,通槽111用于转移箱体1时的握持部。用户可通过握住通槽111方便地将箱体1转移至指定位置并将其中的垃圾倒入指定位置。
[0078]
需要说明的是,本发明所述的“上”、“下”、“顶部”、“底部”均相对于可分类回收垃圾的集成装置工作时所述处的位置而言,仅仅为了叙述方便,不应对本发明造成限制。
[0079]
虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1