无绳电梯运载工具工作站的制作方法
1.本文中公开的主题大体上涉及电梯系统领域,且特别地涉及用于将电梯轿厢从电梯井移动到工作站的方法和设备。
背景技术:
2.电梯轿厢常规上由绳和对重操作,其典型地仅允许单次一个电梯轿厢在电梯井中。无绳电梯系统可允许单次多于一个电梯轿厢在电梯井中。
技术实现要素:
3.根据实施例,提供一种用于将电梯轿厢从第一电梯井转移到第二电梯井的系统。系统包括:第一推进系统,其配置成使第一电梯轿厢移动通过第一电梯井;转移托架,其配置成将第一电梯轿厢和第一推进系统从第一电梯井通过转移站移动到第二电梯井,转移托架包括:电梯轿厢容纳槽,以当电梯轿厢容纳槽与第一电梯井对准时接收第一电梯轿厢和第一推进系统,其中第一推进系统配置成将第一电梯轿厢和第一推进系统从第一电梯井内的电梯系统移动到转移托架上到运载工具工作站。
4.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括运载工具工作站位于转移站下方的层站上、转移站上方的层站或与转移站相同的层站上。
5.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括运载工具工作站位于第二电梯井内,且其中转移托架配置成从第二电梯井通过转移站移动到第三电梯井以从备用(spare)运载工具站接收第二电梯轿厢和第二推进系统。
6.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括竖直延伸通过第一电梯井的第一导梁,该第一导梁包括第一表面和与第一表面相反的第二表面,其中第一推进系统是第一爬梁器系统,包括:第一轮,其与第一表面接触;以及第一电动马达,其配置成旋转第一轮。
7.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括电梯轿厢容纳槽还包括:第一容纳槽导梁,其配置成与第一导梁对准。
8.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括竖直延伸通过第一电梯井的第一导轨,其中电梯轿厢容纳槽还包括:第一容纳槽导轨,其配置成与第一导轨对准。
9.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括竖直延伸通过第一电梯井的第二导梁,该第二导梁包括第二导梁的第一表面和与第二导梁的第一表面相反的第二导梁的第二表面,其中第一爬梁器系统还包括:第二轮,其与第一导梁的第二表面接触;第三轮,其与第二导梁的第一表面接触;以及第二电动马达,其配置成旋转第三轮。
10.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括电梯轿厢容纳槽还包括:第二容纳槽导梁,其配置成与第二导梁对准。
11.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括竖直延伸通过第一电梯井的第二导梁,该第二导梁包括第二导梁的第一表面和与第二导梁的第一表面相反的第二导梁的第二表面,其中第一爬梁器系统还包括:第二轮,其与第一导梁的第二表面接触;第三轮,其与第二导梁的第一表面接触;以及第二电动马达,其配置成旋转第三轮。
12.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括电梯轿厢容纳槽还包括:第二容纳槽导梁,其配置成与第二导梁对准。
13.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括竖直延伸通过第一电梯井的第二导轨,其中电梯轿厢容纳槽还包括:第二容纳槽导轨,其配置成与第二导轨对准。
14.根据另一实施例,提供一种使电梯轿厢在电梯井之中移动的方法。方法包括:使转移托架移动到第一电梯井以接取第一电梯轿厢和第一推进系统;使转移托架内的电梯轿厢容纳槽与第一电梯井对准;使用第一推进系统将第一电梯轿厢和第一推进系统从第一电梯井移动到电梯轿厢容纳槽中;以及使转移托架与在电梯轿厢容纳槽内的第一电梯轿厢和第一推进系统从第一电梯井移动到运载工具工作站。
15.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括运载工具工作站位于第二电梯井中,且其中方法还包括:使转移托架内的电梯轿厢容纳槽与第二电梯井对准;以及使用第一推进系统将第一电梯轿厢和第一推进系统从电梯轿厢容纳槽移动到第二电梯井内的运载工具工作站中。
16.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括:使转移托架从第二电梯井移动到第三电梯井以接取第三电梯井内的备用运载工具站中的第二电梯轿厢和第二推进系统;使转移托架内的电梯轿厢容纳槽与第三电梯井对准;以及使用第二推进系统将第二电梯轿厢和第二推进系统从第三电梯井内的备用运载工具站移动到电梯轿厢容纳槽中。
17.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括:使转移托架与在电梯轿厢容纳槽内的第二电梯轿厢和第二推进系统从第三电梯井移动来投入使用。
18.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括使用第一推进系统将第一电梯轿厢和第一推进系统从第一电梯井移动到电梯轿厢容纳槽中还包括:使用第一爬梁器系统的第一电动马达来旋转第一轮,该第一轮与竖直延伸通过第一电梯井的第一导梁的第一表面接触。
19.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括:使电梯轿厢容纳槽的第一容纳槽导梁与第一导梁对准。
20.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括:使电梯轿厢容纳槽的第一容纳槽导轨与竖直延伸通过第一电梯井的第一导轨对准。
21.除了本文中描述的特征中的一个或多个之外,或作为备选,此外的实施例可包括使用第一推进系统将第一电梯轿厢和第一推进系统从第一电梯井移动到电梯轿厢容纳槽中还包括:旋转第二轮,该第二轮与竖直延伸通过电梯井的第一导梁的第二表面接触;以及使用爬梁器系统的第二电动马达来旋转第三轮,该第三轮与竖直延伸通过第一电梯井的第
二导梁的第一表面接触。
22.根据另一实施例,提供一种体现在非暂时性计算机可读介质上的计算机程序产品。计算机程序产品包括指令,该指令在由处理器执行时使处理器执行操作,该操作包括:使转移托架移动到第一电梯井以接取第一电梯轿厢和第一推进系统;使转移托架内的电梯轿厢容纳槽与第一电梯井对准;使用第一推进系统将第一电梯轿厢和第一推进系统从第一电梯井移动到电梯轿厢容纳槽中;以及使转移托架与在电梯轿厢容纳槽内的第一电梯轿厢和第一推进系统从第一电梯井移动到运载工具工作站。
23.本公开内容的实施例的技术效果包括使用转移托架将电梯轿厢从电梯道移入和/或移出运载工具工作站和/或备用运载工具站。
24.除非另外明确地指示,前述特征和要素可在无排它性的情况下以各种组合来组合。根据以下描述和附图,这些特征和要素以及其操作将变得更明显。然而,应理解的是,以下描述和图意在性质上为说明性和解释性的且非限制性的。
附图说明
25.本公开内容通过示例来示出且不限于附图中,附图中相似的参考标号指示类似的要素。
26.图1是根据本公开内容的实施例的具有爬梁器系统的电梯系统的示意图;图2a-2f示出根据本公开内容的实施例的上转移站内的转移站系统;图3a-3f示出根据本公开内容的实施例的上转移站内的转移站系统;以及图4是根据本公开内容的实施例的使电梯轿厢在电梯井之中移动的方法的流程图。
具体实施方式
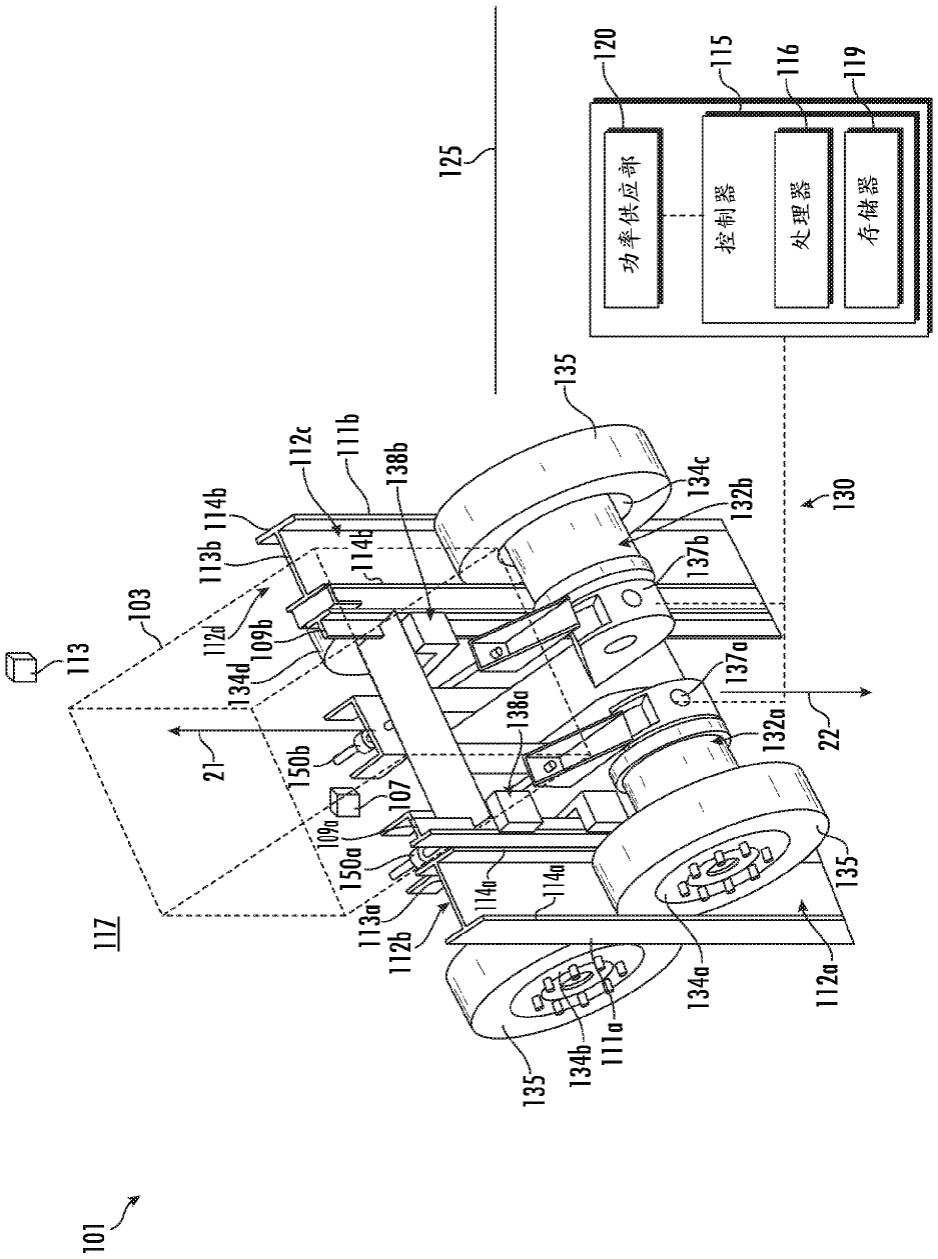
27.图1是电梯系统101的透视图,该电梯系统101包括电梯轿厢103、爬梁器系统130、控制器115和功率源120。虽然在图1中示为与爬梁器系统130分离,本文中描述的实施例可适用于包括在爬梁器系统130中的控制器115(即,与爬梁器系统130移动通过电梯井117),且还可适用于位于爬梁器系统130外的控制器(即,远程连接到爬梁器系统130且相对于爬梁器系统130静止)。虽然在图1中示为与爬梁器系统130分离,本文中描述的实施例可适用于包括在爬梁器系统130中的功率源120(即,与爬梁器系统130移动通过电梯井117),且还可适用于位于爬梁器系统130外的功率源(即,远程连接到爬梁器系统130且相对于爬梁器系统130静止)。
28.爬梁器系统130配置成使电梯轿厢103在电梯井117内且沿导轨109a、109b移动,该导轨109a、109b竖直延伸通过电梯井117。在实施例中,导轨109a、109b是t形梁。爬梁器系统130包括一个或多个电动马达132a、132b。电动马达132a、132b配置成通过旋转一个或多个轮134a、134b来使爬梁器系统130在电梯井117内移动,该一个或多个轮134a、134b压靠导梁111a、111b。在实施例中,导梁111a、111b是i形梁。要理解的是,虽然示出i形梁,任何梁或类似结构可与本文中描述的实施例使用。由电动马达132a、132b驱动的轮134a、134b、134c、134d之间的摩擦允许轮134a、134b、134c、134d沿导梁111a、111b爬上21和爬下22。导梁竖直延伸通过电梯井117。要理解的是,虽然示出两个导梁111a、111b,本文中公开的实施例可与
一个或多个导梁使用。还要理解的是,虽然示出两个电动马达132a、132b,本文中公开的实施例可适用于具有一个或多个电动马达的爬梁器系统130。例如,爬梁器系统130对于四个轮134a、134b、134c、134d中的每个可具有一个电动马达。电动马达132a、132b可为永磁电动马达、异步马达或为本领域技术人员所已知的任何电动马达。在本文中未示出的其它实施例中,另一配置可在两个不同的竖直位置处(即,在电梯轿厢103的底部和顶部处)具有动力轮。
29.第一导梁111a包括腹板部分113a和两个凸缘部分114a。第一导梁111a的腹板部分113a包括第一表面112a和与第一表面112a相反的第二表面112b。第一轮134a与第一表面112a接触,且第二轮134b与第二表面112b接触。第一轮134a可通过轮胎135与第一表面112a接触,且第二轮134b可通过轮胎135与第二表面112b接触。第一轮134a由第一压缩机构150a压靠第一导梁111a的第一表面112a,且第二轮134b由第一压缩机构150a压靠第一导梁111a的第二表面112b。第一压缩机构150a将第一轮134a和第二轮134b压缩在一起来夹到第一导梁111a的腹板部分113a上。第一压缩机构150a可为金属的或弹性体的弹簧机构、气动机构、液压机构、螺丝扣机构、机电促动器机构、弹簧系统、液压缸、机动弹簧装置或任何其它已知的力促动方法。第一压缩机构150a可在电梯系统101的操作期间能够实时调整以控制在第一导梁111a上第一轮134a和第二轮134b的压缩。第一轮134a和第二轮134b可各自包括轮胎135以增加与第一导梁111a的牵引。
30.第一表面112a和第二表面112b竖直延伸通过井117,因此产生用于第一轮134a和第二轮134b搭乘在其上的轨道。凸缘部分114a可用作护轨以有助于沿该轨道引导轮134a、134b且因此有助于防止轮134a、134b驶离轨道。
31.第一电动马达132a配置成旋转第一轮134a以沿第一导梁111a爬上21或爬下22。第一电动马达132a还可包括第一马达制动器137a以减慢和停止第一电动马达132a的旋转。第一马达制动器137a可机械地连接到第一电动马达132a。第一马达制动器137a可为离合器系统、盘式制动器系统、鼓式制动器系统、第一电动马达132a的转子上的制动器、电子制动、涡流制动器、磁流变流体制动器或任何其它已知的制动系统。爬梁器系统130还可包括第一导轨制动器138a,其可操作地连接到第一导轨109a。第一导轨制动器138a配置成通过夹到第一导轨109a上来减慢爬梁器系统130的移动。第一导轨制动器138a可为在爬梁器系统130上作用于第一导轨109a的钳式制动器,或接近电梯轿厢103作用于第一导轨109的钳式制动器。
32.第二导梁111b包括腹板部分113b和两个凸缘部分114b。第二导梁111b的腹板部分113b包括第一表面112c和与第一表面112c相反的第二表面112d。第三轮134c与第一表面112c接触,且第四轮134d与第二表面112d接触。第三轮134c可通过轮胎135与第一表面112c接触,且第四轮134d可通过轮胎135与第二表面112d接触。第三轮134c由第二压缩机构150b压靠第二导梁111b的第一表面112c,且第四轮134d由第二压缩机构150b压靠第二导梁111b的第二表面112d。第二压缩机构150b将第三轮134c和第四轮134d压缩在一起来夹到第二导梁111b的腹板部分113b上。第二压缩机构150b可为弹簧机构、螺丝扣机构、促动器机构、弹簧系统、液压缸和/或机动弹簧装置。第二压缩机构150b可在电梯系统101的操作期间能够实时调整以控制在第二导梁111b上第三轮134c和第四轮134d的压缩。第三轮134c和第四轮134d可各自包括轮胎135以增加与第二导梁111b的牵引。
33.第一表面112c和第二表面112d竖直延伸通过井117,因此产生用于第三轮134c和第四轮134d搭乘在其上的轨道。凸缘部分114b可用作护轨以有助于沿该轨道引导轮134c、134d且因此有助于防止轮134c、134d驶离轨道。
34.第二电动马达132b配置成旋转第三轮134c以沿第二导梁111b爬上21或爬下22。第二电动马达132b还可包括第二马达制动器137b以减慢和停止第二电动马达132b的旋转。第二马达制动器137b可机械地连接到第二电动马达132b。第二马达制动器137b可为离合器系统、盘式制动器系统、鼓式制动器系统、第二电动马达132b的转子上的制动器、电子制动、涡流制动器、磁流变流体制动器或任何其它已知的制动系统。爬梁器系统130包括第二导轨制动器138b,其可操作地连接到第二导轨109b。第二导轨制动器138b配置成通过夹到第二导轨109b上来减慢爬梁器系统130的移动。第二导轨制动器138b可为在爬梁器系统130上作用于第一导轨109a的钳式制动器,或接近电梯轿厢103作用于第一导轨109a的钳式制动器。
35.电梯系统101还可包括位置参考系统113。位置参考系统113可安装在电梯井117的顶部处的固定部分上,诸如在支承件或导轨109上,且可配置成提供与电梯轿厢103在电梯井117内的位置相关的位置信号。在其它实施例中,位置参考系统113可直接地安装到电梯系统的移动构件(例如,电梯轿厢103或爬梁器系统130),或可位于如本领域中已知的其它位置和/或配置中。如本领域中已知的,位置参考系统113可为用于监测电梯轿厢在电梯井117内的位置的任何装置或机构。如将由本领域技术人员所了解的,例如而非限制,位置参考系统113可为编码器、传感器、加速度计、高度计、压力传感器、测距仪或其它系统,且可包括速度感测、绝对位置感测等。
36.控制器115可为电子控制器,该电子控制器包括处理器116以及相关联的存储器119,其包括计算机可执行指令,该计算机可执行指令在由处理器116执行时使处理器116执行各种操作。处理器116可为但不限于很多种可能架构中的任何的单处理器或多处理器系统,包括均匀或不均匀布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。存储器119可为但不限于随机存取存储器(ram)、只读存储器(rom)或者其它电子、光学、磁性或任何其它计算机可读介质。
37.控制器115配置成控制电梯轿厢103和爬梁器系统130的操作。例如,控制器115可向爬梁器系统130提供驱动信号来控制电梯轿厢103的加速、减速、匀速(level)、停止等。
38.控制器115还可配置成从位置参考系统113或任何其它期望的位置参考装置接收位置信号。
39.当在电梯井117内沿导轨109a、109b向上21或向下22移动时,电梯轿厢103可在由控制器115控制下停止于一个或多个层站125处。在一个实施例中,控制器115可位于远程或云中。在另一实施例中,控制器115可位于爬梁器系统130上。在实施例中,控制器115控制爬梁器系统130的机载(on-board)运动控制(例如,高于各个马达控制器的管理功能)。
40.用于电梯系统101的功率供应部120可为任何功率源,包括功率网和/或电池功率,其与其它构件组合向爬梁器系统130供应。在一个实施例中,功率源120可位于爬梁器系统130上。在实施例中,功率供应部120是包括在爬梁器系统130中的电池。
41.电梯系统101还可包括加速度计107,其附接到电梯轿厢103或爬梁器系统130。加速度计107配置成检测电梯轿厢103和爬梁器系统130的加速度和/或速度。
42.要理解的是,虽然本文中为了示例性的论述来示出爬梁器系统130,本文中公开的实施例可适用于其它多轿厢的和/或无绳线性马达驱动的推进系统,诸如,例如永磁马达推进系统。
43.现在参照图2a、图2b、图2c、图2d、图2e、图2f、图3a、图3b、图3c、图3d、图3e和图3f,继续参照图1,示出根据本公开内容的实施例的用于转移站310a、310b的转移站系统200。图2a-2f是上转移站310a的侧视图,且图3a-3f是下转移站310b的侧视图。
44.转移托架202可为机动的且自动化的托架。转移托架202可沿上转移站310a中的水平横梁242和下转移站310b中的电梯井117a、117b、117c、117d的水平表面244(即,电梯井117a、117b、117c、117d的横梁或底部)移动。转移托架202可包括推进装置(为了简单,未示出)以旋转轮217。推进装置可为电动马达和相关联的轮217或永磁马达。在实施例中,如图2a-2f中示出的,转移托架202定位在上转移站310a中电梯系统101上方。在实施例中,如图3a-3f中示出的,转移托架202定位在下转移站310b中电梯系统101下方。转移托架202包括一个或多个电梯轿厢容纳槽226,其配置成接收和保持/固定电梯轿厢103和爬梁器系统130。电梯轿厢容纳槽226可使用轿厢保持机构来保证在电梯井117a、117b、117c、117d之间由转移托架202运输期间电梯轿厢103和爬梁器系统130不移动。
45.第一电梯井117a和第四电梯井117d可为在不同层站125之间转移乘客的乘客服务电梯井。要理解的是,虽然本文中示出两个乘客服务井,本文中描述的实施例可适用于一个或多个乘客服务电梯井。第二电梯井117b和第三电梯井117c可为在不同层站125之间转移乘客的乘客服务电梯井,或它们可为非乘客服务电梯井。还要理解的是,虽然本文中示出单个转移托架202,本文中描述的实施例可适用于包括一个或多个转移托架202的转移站系统200。
46.第二电梯井117b可用于运载工具工作站400,且第三电梯井117c可用于备用运载工具站500。要理解的是,虽然示出用于备用运载工具站500的第三电梯井117c,本文中公开的实施例可适用于没有用于备用运载工具站500的第三电梯井117c的系统。
47.转移托架202配置成使电梯轿厢容纳槽226与电梯井117a、117b、117c、117d对准以接收和/或转移第一电梯轿厢103a和第一爬梁器系统130a来投入和停止使用。转移托架202还可配置成使电梯轿厢容纳槽226与电梯井117a、117b、117c、117d对准以接收和/或转移第二电梯轿厢103b和第二爬梁器系统130b来投入和停止使用。
48.简要地参照图2a-2f中示出的示例。在图2a中,转移托架202可使电梯轿厢容纳槽226与第一电梯井117a对准以接收图2b中的第一电梯轿厢103a。第一爬梁器系统130a然后可在上转移站310a中水平行进以使电梯轿厢容纳槽226与图2c中的第二电梯井117b对准,以将第一电梯轿厢103a和第一爬梁器系统130a转移到图2d中的第二电梯井117b内的运载工具工作站400。转移托架202然后可在上转移站310a中水平行进以使电梯轿厢容纳槽226与第三电梯井117c对准并接收第二电梯轿厢103b和第二爬梁器系统130b,如图2e中示出的。转移托架202然后可在上转移站310a中水平行进以使电梯轿厢容纳槽226与第一电梯井117a或第四电梯井117d对准,以便转移第二电梯轿厢103b和第二爬梁器系统130b来投入使用,如图2f中示出的。
49.简要地参照图3a-3f中示出的示例。在图3a中,转移托架202可使电梯轿厢容纳槽226与第一电梯井117a对准以接收图3b中的第一电梯轿厢103a。第一爬梁器系统130a然后
可在下转移站310b中水平行进以使电梯轿厢容纳槽226与图3c中的第二电梯井117b对准,以将第一电梯轿厢103a和第一爬梁器系统130a转移到图3d中的第二电梯井117b内的运载工具工作站400。转移托架202然后可在下转移站310b中水平行进以使电梯轿厢容纳槽226与第三电梯井117c对准并接收第二电梯轿厢103b和第二爬梁器系统130b,如图3e中示出的。转移托架202然后可在下转移站310b中水平行进以使电梯轿厢容纳槽226与第一电梯井117a或第四电梯井117d对准,以便转移第二电梯轿厢103b和第二爬梁器系统130b来投入使用,如图3f中示出的。
50.当位于运载工具工作站400中时,工作可在第一电梯轿厢103a和/或第一爬梁器系统130b上执行。运载工具工作站400可位于上转移站310a下方(如图2a-2f中示出的)或上方的一个层站,使得在将第一电梯轿厢103a和第一爬梁器系统130a运送到运载工具工作站400之后,转移托架202可在上转移站310a各处自由移动以承载其它电梯轿厢103。运载工具工作站400可位于下转移站310b上方(如图3a-3f中示出的)或下方的一个层站,使得在将第一电梯轿厢103a和第一爬梁器系统130a运送到运载工具工作站400之后,转移托架202可在上转移站310a各处自由移动以承载其它电梯轿厢103。在实施例中,运载工具工作站400可在与上转移站310a相同的层站125上。在实施例中,运载工具工作站400可在与下转移站310b相同的层站125上。运载工具工作站400可包括工作工具,包括但不限于工作平台、测试装备(rig)、测试设备或为本领域技术人员所已知的任何其它工具。
51.备用运载工具站500可位于上转移站310a下方(如图2a-2f中示出的)或上方的一个层站,使得转移托架202可在上转移站310a各处自由移动以承载其它电梯轿厢103。备用运载工具站500可位于下转移站310b上方(如图3a-3f中示出的)或下方的一个层站,使得转移托架202可在上转移站310a各处自由移动以承载其它电梯轿厢103。在实施例中,备用运载工具站500可在与上转移站310a相同的层站125上。在实施例中,备用运载工具站500可在与下转移站310b相同的层站125上。
52.在一个实施例中,备用运载工具站50可提供用于将电梯轿厢103完全从整体系统中去除。例如,位于备用运载工具站500中的导轨109a、109b和导梁111a、111b可为可移动的,以移动电梯轿厢103和爬梁器系统130。例如,位于备用运载工具站500中的导轨109a、109b和导梁111a、111b可连接到台车(dolly)、卡车(truck)、列车(train)、货车(trolly)或由本领域技术人员已知的任何其它运载工具。电梯轿厢容纳槽226可包括第一容纳槽导梁111a-1和第二容纳槽导梁111b-1。第一容纳槽导梁111a-1配置成与第一导梁111a对准,使得当爬梁器系统130离开电梯井117且进入电梯轿厢容纳槽226以搭乘转移托架202时,轮134a、134b(见图1)可从第一导梁111a滚动到第一容纳槽导梁111a-1。转移托架202可包括第一传感器240a,其配置成检测第一容纳槽导梁111a-1何时与第一导梁111a对准。要理解的是,转移托架202可包括其它传感器,其包括但不限于微型开关、间隙传感器或断梁传感器。
53.第二槽容纳导梁111b-1配置成与第二导梁111b对准,使得当爬梁器系统130离开电梯井117且进入电梯轿厢容纳槽226以搭乘转移托架202时,轮134c、134d(见图1)可从第二导梁111b滚动到第二槽容纳导梁111b-1。转移托架202可包括第二传感器240b,其配置成检测第二容纳槽导梁111b-1何时与第二导梁111b对准。
54.第一容纳槽导轨109a-1配置成与第一导轨109a对准。第一传感器240a可配置成检
测第一容纳槽导轨109a-1何时与第一导轨109a对准。
55.第二槽容纳导轨109b-1配置成与第二导轨109b对准。转移托架202可包括第二传感器240b,其配置成检测第二容纳槽导轨109b-1何时与第二导轨109b对准。
56.要理解的是,虽然图2a-3f将转移托架202示为包括两个传感器240a、240b,转移站系统200可包括任何数量的传感器(即,一个或多个传感器)以保证第一容纳槽导梁111a-1与第一导梁111a、第二槽容纳导梁111b-1与第二导梁111b、第一容纳槽导轨109a-1与第一导轨109a以及第二槽容纳导轨109b-1与第二导轨109b对准。
57.传感器240a、240b配置成与爬梁器系统130的控制器115(见图1)通信对准,使得爬梁器系统130可将它自身和电梯轿厢103移动到转移托架202的电梯轿厢容纳槽226中。传感器240a、240b还配置成与爬梁器系统130的控制器115(见图1)未通信对准以防止爬梁器系统130试图将它自身和电梯轿厢103移动到并非未对准的转移托架202的电梯轿厢容纳槽226中。
58.传感器240a、240b配置成与转移托架202的转移托架控制器215通信对准或未通信对准。转移托架控制器215配置成控制转移托架202的操作。通过报告与转移托架控制器215未对准,转移托架控制器215然后可采取动作以实现对准,诸如横向移动。通过报告与转移托架控制器215对准,转移托架控制器215可不再需要移动转移托架202,直到电梯轿厢103和爬梁器系统130从电梯井117a、117b、117c、117d中的电梯系统101移入和移出转移托架202的电梯轿厢容纳槽226。
59.转移托架控制器215可为电子控制器,该电子控制器包括处理器216以及相关联的存储器219,其包括计算机可执行指令,该计算机可执行指令在由处理器216执行时使处理器216执行各种操作。处理器216可为但不限于很多种可能架构中的任何的单处理器或多处理器系统,包括均匀或不均匀布置的现场可编程门阵列(fpga)、中央处理单元(cpu)、专用集成电路(asic)、数字信号处理器(dsp)或图形处理单元(gpu)硬件。存储器219可为但不限于随机存取存储器(ram)、只读存储器(rom)或者其它电子、光学、磁性或任何其它计算机可读介质。
60.虽然在图2a-3f中示为分离的控制器,要理解的是,转移托架控制器215可为与爬梁器系统的控制器115分离的控制器,或转移托架控制器215可为与爬梁器系统130的控制器115组合的控制器。另外,转移托架控制器215可为云控制器,或转移托架控制器215可为本地控制器。
61.虽然在图2a-3f中示为与转移托架202分离,本文中描述的实施例可适用于位于转移托架202中(即,与转移托架202移动)或位于云计算网络中的转移托架控制器215。
62.现在参照图4,继续参照先前的图,示出根据本公开内容的实施例的使电梯轿厢103在电梯井117之中移动的方法600的流程图。
63.在框604处,转移托架202移动到第一电梯井117a以接取第一电梯轿厢103a和第一推进系统。在框606处,转移托架202内的电梯轿厢容纳槽226与第一电梯井117a对准。
64.在框608处,第一推进系统将第一电梯轿厢103a从第一电梯井117a移动到电梯轿厢容纳槽226中。在实施例中,第一推进系统是第一爬梁器系统130a,且第一电梯轿厢103a可通过使用第一爬梁器系统130a的第一电动马达132旋转第一轮134a来移动。第一轮134a与竖直延伸通过电梯井117的第一导梁111a的第一表面112a接触。
65.在框610处,转移托架202与在电梯轿厢容纳槽226内的第一电梯轿厢103a和第一推进系统从第一电梯井117a移动到第二电梯井117b。
66.方法600还可包括:在转移托架202内的电梯轿厢容纳槽226与第二电梯井117b对准,且第一推进系统将第一电梯轿厢103a和第一推进系统从电梯轿厢容纳槽2226移动到第二电梯井117b内的运载工具工作站400中。
67.方法600还可包括使转移托架202从第二电梯井117b移动到第三电梯井117c以接取第三电梯井117c内的备用运载工具站500中的第二电梯轿厢103b和第二推进系统。转移托架202内的电梯轿厢容纳槽226可与第三电梯井117c对准,且第二推进系统可将第二电梯轿厢103b和第二推进系统从第三电梯井117c内的备用运载工具站500移动到电梯轿厢容纳槽226中。
68.方法600还可包括使转移托架202与在电梯轿厢容纳槽226内的第二电梯轿厢103b和第二推进系统从第三电梯井移动来投入使用(例如,到第一电梯井117a或第四电梯井117d中)。
69.方法600还可包括使电梯轿厢容纳槽226的第一容纳槽导梁111a-1与第一导梁111a对准。方法600还可包括使电梯轿厢容纳槽226的第一容纳槽导轨109a-1与竖直延伸通过第一电梯井117a的第一导轨109a对准。
70.第一电梯轿厢103a还可通过使用爬梁器系统130的第二电动马达132b旋转第三轮134c来移动,该第三轮与竖直延伸通过第一电梯井117a的第二导梁111b的第一表面112c接触。
71.方法600还可包括使电梯轿厢容纳槽226的第二容纳槽导梁111b-1与第二导梁111b对准。方法600还可包括使电梯轿厢容纳槽226的第二容纳槽导轨109b-1与竖直延伸通过第一电梯井117a的第二导轨109b对准。
72.虽然上文描述以特定的顺序描述了图4的流程,应了解的是,除非在所附权利要求书中另外特别地需要,步骤的排序可变化。
73.本发明可为在任何可能的技术细节集成水平下的系统、方法和/或计算机程序产品。计算机程序产品可包括其上具有计算机可读程序指令的计算机可读存储介质(或多个介质),该计算机可读程序指令用于使处理器执行本发明的方面。
74.如上文描述的,实施例可呈处理器实施的过程以及用于实施那些过程的装置(诸如处理器)的形式。实施例还可呈计算机程序代码(例如,计算机程序产品)的形式,该计算机程序代码包含体现在有形介质(例如,非暂时性计算机可读介质)(诸如软盘、cd rom、硬盘驱动器或任何其它非暂时性计算机可读介质)中的指令,其中,当计算机程序代码加载到计算机中且由计算机执行时,计算机变为用于实施实施例的装置。实施例还可呈计算机程序代码的形式,例如,不管是存储在存储介质中、加载到计算机中且/或由计算机执行,还是在某传送介质上传送、加载到计算机中且/或由计算机执行,还是在某传送介质上(诸如在电线或电缆上、通过光纤或经由电磁辐射)传送,其中,当计算机程序代码加载到计算机中且由计算机执行时,计算机变为用于实施示例性实施例的装置。当在通用微型处理器上实施时,计算机程序代码段使微型处理器配置成产生特定的逻辑电路。
75.用语“约”意在包括基于在提交申请的时候可用的设备与特定量的测量和/或制造公差相关联的误差度。
76.本文中使用的术语仅出于描述特定实施例的目的,且不意在限制本公开内容。如本文中使用的,除非上下文另外清楚地指示,单数形式“一”、“一个”和“该”意在也包括复数形式。还将理解的是,用语“包括(comprises)”和/或“包括了(comprising)”当在该说明书中使用时指定所陈述的特征、整体、步骤、操作、要素和/或构件的存在,但不排除一个或多个其它特征、整体、步骤、操作、要素构件和/或其组的存在或添加。
77.本领域技术人员将了解,本文中示出和描述各种示例性实施例,在特定实施例中各自具有某些特征,但本公开内容不因此受限。相反地,可修改本公开内容以结合此前未描述但与本公开内容的范围相称的任何数量的变型、变更、替换、组合、子组合或等效布置。另外,虽然描述了本公开内容的各种实施例,要理解的是,本公开内容的方面可仅包括所描述的实施例中的一些。相应地,本公开内容不看作是受前述描述所限制,而是仅受所附权利要求书的范围所限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1