一种多自由度助力运物一体机
1.本发明涉及楼梯助力设备技术领域,特别是涉及一种多自由度助力运物一体机。
背景技术:
2.目前,我国社会正趋于老龄化,随着经济发展和社会进步,高层楼房电梯的应用十分普遍,但仍存在许多老旧楼房没有安装电梯,使得居住于此的老人和行走不便的人们上下楼困难。目前市面上可见多种轨道式上下楼机械装置,其中主要有轨道式机械爬楼装置、承载轮椅的平台形式等,但这些形式的上楼装置普遍存在不易转弯,且改造工程复杂,占用空间大,成本高,适合独立高层楼房。
3.综上,为居住于未安装电梯的老旧楼房中的老人及上下楼不便的人们提供一种操作简单无需改造楼房且成本较低的多自由度助力运物一体机,方便人们上下楼,是本领域技术人员亟需解决的问题。
技术实现要素:
4.本发明的目的是提供一种多自由度助力运物一体机,以解决上述现有技术存在的问题,整体结构安装简单,工程量小,功能完备,安全性高,同时配置储物盒,帮助老人完成日常上下楼及物品的运输。
5.为实现上述目的,本发明提供了如下方案:
6.本发明提供一种多自由度助力运物一体机,包括运行轨道、引导单元、制动单元、助力扶手、储物盒和控制单元;
7.所述运行轨道沿所述楼梯延伸方向设置有两条,两条所述运行轨道上下分布,所述引导单元包括两对导轮和驱动导轮的蜗杆蜗轮电机,两对所述导轮分别夹紧在两条运行轨道的上下侧,各个所述导轮由所述蜗杆蜗轮电机驱动,所述导轮由支撑轴支撑于导轮外壳内,所述导轮外壳远离所述运行轨道的一侧设置电机承载箱,所述蜗杆蜗轮电机设置于所述电机承载箱内,所述电机承载箱远离所述运行导轨的一侧设置所述储物盒;所述制动单元用于对所述引导单元的导轮进行制动;
8.位于顶部的电机承载箱的底部设置有第一电机承载箱支架,位于底部的所述电机承载箱的顶部设置有第二电机承载箱支架,所述第一电机承载箱支架的底部通过旋转连接件连接第一云台三角支架的顶部横向端面,所述第二电机承载箱支架的顶部通过旋转连接件连接第二云台三角支架的底部横向端面,所述第一云台三角支架和第二云台三角支架一侧的竖向端面连接所述助力扶手;
9.所述控制单元用于控制蜗杆蜗轮电机和制动单元工作。
10.优选地,所述制动单元包括棘轮、棘爪和舵机,所述舵机安装于所述导轮外壳上,所述舵机的转轴上连接所述棘爪,所述棘轮设置于所述导轮的支撑轴的轴端,所述棘爪与所述棘轮相对设置。
11.优选地,夹紧在上面一条所述运行轨道的一对所述导轮中所述制动单元作用于顶
部的所述导轮,夹紧在下面一条所述运行轨道的一对所述导轮中所述制动单元作用于底部的所述导轮。
12.优选地,所述第一云台三角支架和第二云台三角支架一侧的竖向端面的顶部和底部分别通过一旋转连接件连接电子元器件承载箱的内侧端面,所述助力扶手设置在所述电子元器件承载箱的外侧端面上,所述电子元器件承载箱内设置所述控制单元和供电电池。
13.优选地,所述助力扶手上设置有微动开关,所述微动开关包括前进开关、后退开关和停止开关,所述前进开关和后退开关与所述蜗杆蜗轮电机电信号连接,控制所述蜗杆蜗轮电机的正转和反转,所述停止开关与所述舵机电信号连接,控制所述舵机运动实现制动。
14.优选地,两条所述运行轨道等距设置。
15.优选地,所述导轮为聚氨酯导轮。
16.优选地,所述蜗杆蜗轮电机的动力轴与所述导轮的支撑轴通过联轴器连接。
17.本发明相对于现有技术取得了以下有益技术效果:
18.本发明提供的多自由度助力运物一体机,通过在楼梯一侧的墙壁上安装运行轨道,用电机驱动的导轮夹紧运行轨道上,通过导轮行走实现助力,整体结构安装简单,工程量小,功能完备,安全性高,同时配置储物盒,帮助老人完成日常上下楼及物品的运输。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
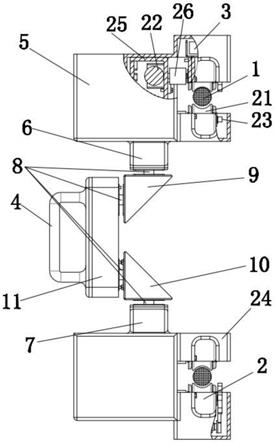
20.图1为本发明中多自由度助力运物一体机的结构示意图;
21.图2为本发明中多自由度助力运物一体机的立体结构示意图;
22.图3为本发明中引导单元和制动单元的结构示意图;
23.图中:1
‑
运行轨道、2
‑
引导单元、21
‑
导轮、22
‑
蜗杆蜗轮电机、23
‑
支撑轴、24
‑
导轮外壳、25
‑
电机承载箱、3
‑
制动单元、31
‑
棘轮、32
‑
棘爪、33
‑
舵机、4
‑
助力扶手、5
‑
储物盒、6
‑
第一电机承载箱支架、7
‑
第二电机承载箱支架、8
‑
旋转连接件、9
‑
第一云台三角支架、10
‑
第二云台三角支架、11
‑
电子元器件承载箱。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明的目的是提供一种多自由度助力运物一体机,以解决现有技术存在的问题。
26.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
27.本实施例中的多自由度助力运物一体机,如图1
‑
3所示,包括运行轨道1、引导单元
2、制动单元3、助力扶手4、储物盒5和控制单元;
28.运行轨道1沿楼梯延伸方向设置有两条,两条运行轨道1上下分布,引导单元2包括两对导轮21和驱动导轮21的蜗杆蜗轮电机22,导轮21为聚氨酯导轮,两对导轮21分别夹紧在两条运行轨道1的上下侧,通过摩擦轮抱杆原理夹紧运行轨道1,夹紧在运行轨道1上下方的两个导轮21相对轨道对称布置,运行时提供驱使老人上楼的足够助力。
29.各个导轮21由蜗杆蜗轮电机22驱动,导轮21由支撑轴23支撑于导轮外壳24内,支撑轴23的两端与导轮外壳24之间通过轴承连接,导轮外壳24远离运行轨道1的一侧设置电机承载箱25,蜗杆蜗轮电机22设置于电机承载箱25内,蜗杆蜗轮电机22的动力轴通过联轴器26连接导轮21的支撑轴23,电机承载箱25远离运行导轨的一侧设置储物盒5;制动单元3用于对引导单元2的导轮21进行制动;
30.位于顶部的电机承载箱25的底部设置有第一电机承载箱支架6,位于底部的电机承载箱25的顶部设置有第二电机承载箱支架7,第一电机承载箱支架6的底部通过旋转连接件8连接第一云台三角支架9的顶部横向端面,第二电机承载箱支架7的顶部通过旋转连接件8连接第二云台三角支架10的底部横向端面,第一云台三角支架9和第二云台三角支架10一侧的竖向端面连接助力扶手4;
31.控制单元用于控制蜗杆蜗轮电机22和制动单元3工作。
32.于本具体实施例中,制动单元3包括棘轮31、棘爪32和舵机33,舵机33安装于导轮外壳24上,舵机33的转轴上连接棘爪32,棘轮31设置于导轮21的支撑轴23的轴端,棘爪32与棘轮31相对设置,舵机33带动棘爪32转动,使棘爪32与棘轮31的齿啮合,使导轮21的支撑轴23停止转动,进而实现刹车功能。具体地,夹紧在上面一条运行轨道1的一对导轮21中制动单元3作用于顶部的导轮21,夹紧在下面一条运行轨道1的一对导轮21中制动单元3作用于底部的导轮21,即为最顶部的一个导轮21的顶部安装舵机33,最底部的一个导轮21的底部安装舵机33。
33.本实施例中的多自由度助力运物一体机的制动由制动单元3,蜗杆蜗轮电机22的防倒转自锁功能以及聚氨酯导轮21与运行轨道1之间的摩擦力共同提供,以使装置在紧急情况或停止状态时能稳定在运行轨道1的固定位置。
34.于本具体实施例中,第一云台三角支架9和第二云台三角支架10一侧的竖向端面的顶部和底部分别通过一旋转连接件8连接电子元器件承载箱11的内侧端面,助力扶手4设置在电子元器件承载箱11的外侧端面上,电子元器件承载箱11内设置控制单元和供电电池;本实施例中,两个云台三角支架(第一云台三角支架9和第二云台三角支架10)顶部横向断面的旋转连接件8和竖向断面的旋转连接件8的旋转轴线互相垂直,以提供足够多的自由度,使得下部引导单元2在弯曲轨道运行轨道1的弯曲段移动时,更加的平滑。楼梯倾角一般为30
°‑
45
°
,多自由度助力运物一体机沿运行轨道1向上运行时,储物盒5的最大倾角一般小于45
°
,因此放置在储物盒5内的物品不会掉落出来。
35.本实施例中,旋转连接件8具体为旋转轴,旋转轴的两端与其连接的第一电机承载箱支架6、第二电机承载箱支架7、第一云台三角支架9、第二云台三角支架10以及电子元器件承载箱11转动连接,即上述各部件能够以旋转轴的轴心为中心旋转。
36.于本具体实施例中,助力扶手4上设置有微动开关(图中未示出),微动开关包括前进开关、后退开关和停止开关,前进开关和后退开关与蜗杆蜗轮电机22电信号连接,控制蜗
杆蜗轮电机22的正转和反转,停止开关与舵机33电信号连接,控制舵机33运动实现制动;前进开关和后退开关控制上楼和下楼,停止开关用以控制制动单元3实现急停。
37.于本具体实施例中,两条运行轨道1等距设置。
38.本发明应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助力解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1