一种可用能控制气动交叉换位实验机
1.本发明涉及气压传动技术领域,具体的说是一种借助气体可用能同时控制伺服气缸两腔气体压力和体积及其变化率,实现活塞多点精确定位的可用能控制气动交叉换位实验机。
背景技术:
2.气动技术广泛应用于点对点的运动控制,但在包装、制造、机器人、医疗器械等行业对气缸活塞多点精确定位有大量且非常迫切的需求。气体的可压缩性和复杂的热力及流动过程导致气压传动呈现高度非线性和不确定性的动力学特性,伺服气缸活塞精确定位必须同时控制两腔气体的压力和体积及其变化率,传统的解决方案依赖于系统辨识和复杂控制器,其昂贵的成本和复杂的操作过程难以满足工程系统的应用条件。因此,气动技术领域迫切地需要使用简单线性控制器自动处理气压传动系统的非线性和不确定性,实现工程应用条件下伺服气缸活塞正反双向运动时的多点精确定位,为了验证气动伺服系统可用能控制的可行性,发明了可用能控制气动交叉换位实验机。
技术实现要素:
3.本发明所要解决的技术问题是克服气压传动的高度非线性和不确定性,使用可用能简单线性控制器同时控制伺服气缸两腔气体的压力和体积及其变化率,提供一种实现伺服气缸正反双向运动时活塞精确定位的可用能控制气动交叉换位实验机。
4.本发明解决上述技术问题采用的技术方案是:一种可用能控制气动交叉换位实验机,其特征是:其包括基板和固定在基板上的定位机构、平动机构以及固定在平动机构上的竖动机构;所述定位机构包括固定在基板上的设有a、b、c、d四个通孔的定位板,放置在定位板上a孔和b孔内的a圆柱和b圆柱,两圆柱与四孔的半径间隙在0.18mm至0.22mm之间。所述平动机构包括通过立板与基板连接的带导轨水平气缸,固定在水平气缸活塞杆端部的水平滑板。所述竖动机构包括固定在水平滑板上的带导轨垂直气缸,固定在垂直气缸活塞杆端部的垂直滑板,由固定在垂直滑板上的阔型气爪驱动的定心夹爪。
5.所述平动机构、竖动机构和定位机构呈串联布局,水平气缸轴线与垂直气缸轴线垂直相交,阔型气爪垂直于开合方向的对称面和定位板四孔轴线均在水平气缸轴线与垂直气缸轴线所确定的铅垂面内。
6.所述平动机构根据设定的水平气缸活塞目标位置和两腔气压计算目标可用能,使用传感器实时检测的水平气缸活塞位置和两腔气压计算实时可用能,使用目标与实时可用能差pd算法控制流量比例阀开度,控制水平气缸活塞精确运动至目标位置。
7.本发明使用可用能线性控制器同时精确控制两腔气体压力和体积及其变化率,实现了水平气缸正反双向运动时活塞的多点精确定位。对照现有技术,其结构合理,运行可靠,是一种理想的可用能控制气动交叉换位实验机。
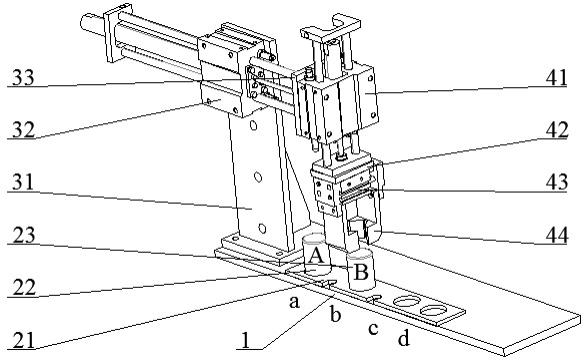
8.下面结合附图对本发明进一步说明。图1是本发明的结构原理图。图1中:1.基板,
21.定位板,22.a圆柱,23.b圆柱,31.立板,32.水平气缸,33.水平滑板,41.垂直气缸,42.垂直滑板,43. 阔型气爪,44.定心夹爪。
9.由图1可以看出,一种可用能控制气动交叉换位实验机,其设有各零部件安装基准的基板1,固定在基板1上的定位机构、平动机构以及固定在平动机构上的竖动机构;所述定位机构包括固定在基板上的设有a、b、c、d四个通孔的定位板21,放置在定位板21上a孔和b孔内的a圆柱22和b圆柱23,两圆柱与四孔的半径间隙在0.18mm至0.22mm之间。所述平动机构包括通过立板31与基板1连接的带导轨水平气缸32,固定在水平气缸32活塞杆端部的水平滑板33。所述竖动机构包括固定在水平滑板33上的带导轨垂直气缸41,固定在垂直气缸41活塞杆端部的垂直滑板42,由固定在垂直滑板42上的阔型气爪43驱动的定心夹爪44。
10.所述平动机构、竖动机构和定位机构呈串联布局,水平气缸32轴线与垂直气缸41轴线垂直相交,阔型气爪43垂直于开合方向的对称面和定位板21四孔轴线均在水平气缸32轴线与垂直气缸41轴线所确定的铅垂面内。
11.所述平动机构根据设定的水平气缸32活塞目标位置和两腔气压计算目标可用能,使用传感器实时检测的水平气缸32活塞位置和两腔气压计算实时可用能,使用目标与实时可用能差pd算法控制流量比例阀开度,控制水平气缸32活塞精确运动至目标位置。
12.本发明使用可用能控制水平气缸实现了活塞正反双向运动时误差小于0.18mm的多点精确定位,完成了a圆柱和b圆柱的交叉换位作业。
13.本发明实现两圆柱交叉换位的过程为:第一次搬运过程的定位、抓取、换位、回位,后三次搬运过程、归位过程,每次可完成a圆柱22和b圆柱23在定位板21上a孔和b孔之间的交叉换位。该机第一次搬运的定位过程为使用比例阀控制水平气缸32带动定心夹爪44精确运动至位于定位板21上a孔中的a圆柱22的正上方,开始抓取过程。开始抓取,使用电磁换向阀依次控制垂直气缸41活塞下行至最低位,阔型夹爪43闭合带动定心夹爪44夹紧a圆柱22,完成抓取作业。开始换位,依次控制垂直气缸41上行至零位,水平气缸32带动定心夹爪44向右精确运动至定位板21上c孔的正上方,垂直气缸31下行至最低位将a圆柱22放入定位板41的c孔中,开始回位过程。开始回位,依次控制阔型夹爪43张开带动定心夹爪44松开a圆柱22,垂直气缸31上行至零位,完成第一次搬运过程。开始后三次搬运过程,第二次搬运过程为将放置在定位板21上b孔中的b圆柱23搬运至定位板21的孔d中,第三次搬运过程为将放置在定位板21上c孔中的a圆柱22搬运至定位板21的b孔中,第四次搬运过程为将放置在定位板21上d孔中的b圆柱23搬运至定位板21的a孔中,完成两圆柱的交叉换位,开始归位过程。开始归位,控制水平气缸活塞运动至最左端零位的同时,准备开始下一次两圆柱的交叉换位作业。
技术特征:
1.一种可用能控制气动交叉换位实验机,其特征是:其设有各零部件安装基准的基板,固定在基板上的定位机构、平动机构以及固定在平动机构上的竖动机构;所述定位机构包括固定在基板上的设有a、b、c、d四个通孔的定位板,放置在定位板上a孔和b孔内的a圆柱和b圆柱,两圆柱与四孔的半径间隙在0.18mm至0.22mm之间;所述平动机构包括通过立板与基板连接的带导轨水平气缸,固定在水平气缸活塞杆端部的水平滑板;所述竖动机构包括固定在水平滑板上的带导轨垂直气缸,固定在垂直气缸活塞杆端部的垂直滑板,由固定在垂直滑板上的阔型气爪驱动的定心夹爪。2.根据权利要求1所述的一种可用能控制气动交叉换位实验机,其特征是:所述平动机构、竖动机构和定位机构呈串联布局,水平气缸轴线与垂直气缸轴线垂直相交,阔型气爪垂直于开合方向的对称面和定位板四孔轴线均在水平气缸轴线与垂直气缸轴线所确定的铅垂面内。3.根据权利要求1所述的一种可用能控制气动交叉换位实验机,其特征在于:所述平动机构根据设定的水平气缸活塞目标位置和两腔气压计算目标可用能,使用传感器实时检测的水平气缸活塞位置和两腔气压计算实时可用能,使用目标与实时可用能差pd算法控制流量比例阀开度,控制水平气缸活塞精确运动至目标位置。
技术总结
本发明涉及一种可用能控制气动交叉换位实验机,其设有各零部件安装基准的基板,固定在基板上的定位机构、平动机构以及固定在平动机构上的竖动机构;所述定位机构包括固定在基板上的设有a、b、c、d四个通孔的定位板,放置在定位板上a孔和b孔内的A圆柱和B圆柱,两圆柱与四孔的半径间隙在0.18mm至0.22mm之间。所述平动机构包括通过立板与基板连接的带导轨水平气缸,固定在水平气缸活塞杆端部的水平滑板。所述竖动机构包括固定在水平滑板上的带导轨垂直气缸,固定在垂直气缸活塞杆端部的垂直滑板,由固定在垂直滑板上的阔型气爪驱动的定心夹爪。本发明使用可用能线性控制器同时精确控制两腔气体压力和体积及其变化率,实现了水平气缸正反双向运动时活塞的多点精确定位。对照现有技术,其结构合理,运行可靠,是一种理想的可用能控制气动交叉换位实验机。可用能控制气动交叉换位实验机。可用能控制气动交叉换位实验机。
技术研发人员:李哲 林安阁 钱学锋
受保护的技术使用者:哈尔滨工业大学(威海)
技术研发日:2021.10.28
技术公布日:2022/1/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1