多料箱机器人存取货作业的最优路径方法
1.本发明涉及智能仓储技术领域,具体涉及在多料箱机器人仓库系统中多料箱机器人存取货作业的最优路径方法。
背景技术:
2.目前,仓库的自动与机器人化是工业4.0供应链背景下的大趋势,在中国,机器人仓库数量正在飞速增长。订单拣选与储存环节的成本占据整个仓库的运营成本的百分之六十以上。在多料箱机器人仓库系统中,机器人在存取货时所用的路径策略是一个难题,好的路径策略可以极大地降低订单拣选与储存环节的成本,从而降低机器人仓库的整体运作成本。因此,如何来改进机器人存取货作业的流程以及确认存取货的最优路径就显得尤为重要,通过对存取货作业流程的改进以及提出相应的最优路径算法,可以提升多料箱机器人仓库的运作效率,降低运作成本,可以更好地助力多料箱机器人仓库的推动与发展。
3.目前,关于传统人工仓库的订单拣选与储存环节的路径优化算法较多,但是关于多料箱机器人仓库的订单拣选与储存环节的路径优化算法较少。多料箱机器人的订单拣选与储存环节更为复杂,目前大多是通过启发式的算法来得到一个近似最优的路径,因为传统的最优算法计算时间过长,很难应用在需要即时快速求得路径的实际仓库运营中。
4.现有技术中缺乏一种可用于实际仓库运营,快速求得多料箱机器人仓库的路径最优解的算法。
技术实现要素:
5.本发明的主要目的在于克服现有技术的不足,提出一种多料箱机器人存取货作业的最优路径方法,以解决现有的多料箱机器人路径优化算法求解耗时较长,难以满足多料箱机器人仓库即时性需求的技术问题。
6.为解决上述技术问题,本发明采用如下技术方案:
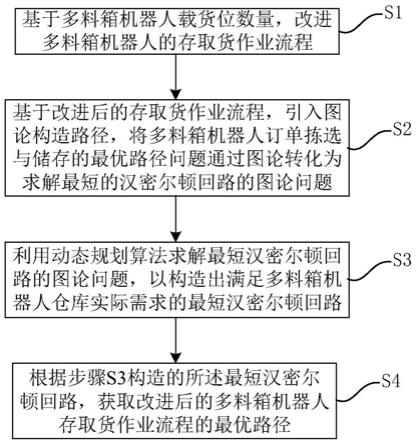
7.一种多料箱机器人存取货作业的最优路径方法,包括:s1、基于多料箱机器人载货位数量,改进多料箱机器人的存取货作业流程;s2、基于改进后的存取货作业流程,引入图论构造路径,将多料箱机器人订单拣选与储存的最优路径问题通过图论转化为求解最短的汉密尔顿回路的图论问题;s3、利用动态规划算法求解所述最短的汉密尔顿回路的图论问题,以构造出满足多料箱机器人仓库实际需求的最短汉密尔顿回路;s4、根据步骤s3构造的所述最短汉密尔顿回路,获取改进后的多料箱机器人存取货作业流程的最优路径。
8.进一步地,步骤s1中,改进多料箱机器人的存取货作业流程包括:当多料箱机器人在仓库中工作,且所述多料箱机器人有空的载货位时,将原存取货作业流程改进为:所述多料箱机器人在一个取货点先取出一个料箱放到所述空的载货位上,再将一个需要存的料箱放到空的取货点,然后继续前往下一个取货点,执行与上一取货点相同的操作,实现在一个取货点先后完成一次取货和一次存货。
9.更进一步地,步骤s1中,改进多料箱机器人的存取货作业流程包括:s11、具有n个
载货位的多料箱机器人满载n个需要存的料箱从工作站出发,到达一个存货点时,取下第一个需要存的料箱存入该存货点,从而获得一个空的载货位;s12、所述多料箱机器人前往一个取货点执行如下操作:先从该取货点取出一个需要运往工作站的料箱放到空的载货位上,再将第二个需要存的料箱存入已空的该取货点,此时所述多料箱机器人再次获得一个空的载货位;s13、所述多料箱机器人前往下一个取货点,重复步骤s12,直至所述多料箱机器人满载n个需要运往工作站的料箱。
10.进一步地,步骤s2包括:将仓库的工作站w和货位点,以及所有巷道的上出入口aj与下出入口bj转换为图g的顶点;其中,j=1,2,
…
,m,m为所述仓库中巷道的数量,所述货位点包括1个存货点s和n个取货点ri,i=1,2,
…
,n,n等于所述多料箱机器人的载货位数量;从而,将多料箱机器人订单拣选与储存的最优路径问题转化为求解图g包含顶点w、s、ri的最短汉密尔顿回路。
11.更进一步地,步骤s3中,利用动态规划算法求解所述最短汉密尔顿回路的图论问题是通过求解最短的旅游子图来实现。
12.更进一步地,如果存在一个子图包含所有必须被访问的顶点ri、w和s,并且能用子图t中的弧和点恰好一次就得到一个完整的订单拣选与储存回路,则子图t为旅游子图;对于一个子图当且仅当:(1).所有必须被访问的顶点ri、w和s在子图t上的度数都是正的;(2).除了零度的顶点,子图t是连通的;以及(3).子图t中的每个顶点都有偶数度或零度时,子图t是旅游子图。
13.更进一步地,在求解所述最短的旅游子图时,先进行如下定义:设是图g的一个子图,包括巷道j左边的所有顶点和弧以及巷道j的上出入口aj与下出入口bj;也是图g的一个子图,包括了及巷道j内的所有弧和顶点;并将和都称为lj;如果存在一个图且tj∪cj是图g的旅游子图,则子图是一个部分旅游子图,其中cj是tj的补图。
14.更进一步地,在求解所述最短的旅游子图时,如果两个部分旅游子图拥有相同的补图,那么称这两个部分旅游子图为等价的两个部分旅游子图;所述部分旅游子图被分为不同的等价类,每个所述等价类由三个元素组成,所述三个元素分别是:aj的度的奇偶、bj的度的奇偶、当前部分旅游子图的分支数量;从而得到共7个旅游子图的等价类,分别为:(u,u,1c),(e,0,1c),(0,e,1c),(e,e,1c),(e,e,2c),(0,0,0c),(0,0,1c),其中u代表度是奇数,e代表度是偶数,0c代表零个分支,1c代表一个分支,2c代表两个分支。
15.更进一步地,所述求解最短的旅游子图,包括:从仓库的最左边第一条巷道开始,实施动态规划:初始状态为空图把巷道内竖直方向的子图加入到中得到第一部分旅游子图将组合出的每个等价类的最短部分旅游子图保留,在此基础上,将连接两个相邻巷道的水平方向的子图加到所述第一部分旅游子图中得到第二部分旅游子图将组合出的每个等价类的最短部分旅游子图保留;依次从左到右,按第1条巷道、第2条巷道、
…
、第m条巷道执行所述动态规划,得到旅游子图的不同的等价类的最短旅游子图,从等价类(e,0,1c),(0,e,1c),(e,e,1c)以及(0,0,1c)中选取最短的旅游子图,即为所述动态规划算法求解的所述最短汉密尔顿回路。
16.更进一步地,步骤s4包括:s41、所述多料箱机器人从工作站w出发;s42、所述多料箱机器人按照最短的路到达所述存货点s;s43、如果当前顶点附近有一对未使用的平行弧,则使用该对平行弧的其中一个弧来访问下一个顶点,到达下一个顶点后重复步骤s43;s44、如果当前顶点附近有任何未使用的单弧,则使用其中一个单弧来访问下一个顶点,到达下一个顶点后重复步骤s43;s45、如果有一对平行弧与当前顶点相邻,其中一条弧线仍未使用,则通过该条未使用的弧访问下一个顶点,到达下一个顶点后重复步骤s43;s46、停止,所述多料箱机器人回到工作站w。
17.本发明技术方案的有益效果在于:本发明首先对多料箱机器人的存取货作业流程进行改进,使得机器人的拣选与储存更加高效,并且降低后续优化算法的计算难度;再基于改进的存取货作业流程,引入图论,将最优路径问题转化为求解最短汉密尔顿回路问题,最后进行动态规划来求解最短路径,使得本发明的方法能够以较快的计算速度获得最优路径,从而适于应用在即时性要求较高的智能仓库的实际运营中,从拣选与储存环节大大地降低仓库的运营成本。
附图说明
18.图1是本发明实施例多料箱机器人存取货作业的最优路径方法流程图;
19.图2是本发明实施例一示例性仓库的平面图;
20.图3是本发明实施例中改进的多料箱机器人存取货作业流程的路径图;
21.图4是本发明实施例中巷道内竖直方向子图的所有可能性;
22.图5是本发明实施例中巷道间水平方向子图的所有可能性;
23.图6是本发明实施例中最短汉密尔顿回路示意图。
具体实施方式
24.下面结合附图和具体的实施方式对本发明作进一步说明。
25.如图1所示,本发明实施例提供一种多料箱机器人存取货作业的最优路径方法,包括如下步骤s1~s4:
26.s1、基于多料箱机器人(后续简称“机器人”)载货位数量,改进机器人的存取货作业流程。
27.由于多料箱机器人有多个载货位,基于此,可以对多料箱机器人的存取货作业流程进行改进。由于本发明仅涉及多料箱机器人,为简化描述,后续直接简称“机器人”,指代的均是“多料箱机器人”。当机器人在仓库中工作且有空的载货位时,将原存取货作业流程改进为:机器人在一个取货点先取出一个料箱放到空的载货位上,再将一个需要存的料箱放到空的取货点,然后继续前往下一个取货点,执行与上一取货点相同的操作,实现在一个取货点先后完成一次取货和一次存货。具体的改进步骤包括s11~s13:
28.s11、具有n个载货位的机器人满载n个需要存的料箱从工作站出发,到达一个存货点时,取下第一个需要存的料箱存入该存货点,从而获得一个空的载货位;
29.s12、机器人前往一个取货点执行如下操作:到取货点时先从该取货点取出一个需要运往工作站的料箱放到空的载货位上,再将第二个需要存的料箱存入已空的该取货点,此时机器人再次获得一个空的载货位;
30.s13、机器人前往下一个取货点,重复步骤s12,直至机器人满载n个需要运往工作站的料箱,进入下一轮存取货作业。
31.在原有的多料箱机器人仓库存取货流程中,对于具有n个载货位的机器人而言,从工作站出发到返回工作站的一趟完整的存取货作业流程需访问n个取货点及n个存货点,进行上述步骤s1的改进之后,机器人只需要离开工作站后访问1个存货点和n个取货点即可完成n个存货任务与n个取货任务。大大缩短了存取货作业流程的路径,为后续的最优路径计算提供了优化的基础。
32.s2、基于改进后的存取货作业流程,引入图论构造路径,将多料箱机器人订单拣选与储存的最优路径问题通过图论转化为求解最短的汉密尔顿回路的图论问题。具体地,将仓库的工作站w和货位点,以及所有巷道的上出入口aj与下出入口bj转换为图g的顶点;其中,j=1,2,
…
,m,m为仓库中巷道的数量,货位点包括1个存货点s和n个取货点ri,i=1,2,
…
,n,n等于机器人的载货位数量;从而,将箱机器人订单拣选与储存的最优路径问题转化为求解图g包含顶点w、s、ri的最短汉密尔顿回路。
33.如图2所示,一个示例性的仓库中共有6条巷道(竖直虚线所示),两两巷道之间的宽度为2,每条巷道的长度为10,所有巷道的两端分别与一条横向通道连通,机器人可通过横向通道从一条巷道移动到其它巷道。在该示例性的仓库中,图g的顶点包括工作站w、一个存货点s、11个取货点r1,r2,
…
,r
11
,以及所有巷道上出入口a1,a2,
…
,a6和所有巷道下出入口b1,b2,
…
,b6。所有相邻顶点之间的距离均已在图2中标示出(图2中长方形内的数字即表示两个顶点之间的距离),求解最短汉密尔顿回路即要寻找一条包含顶点r1,r2,
…
,r
11
,顶点w以及顶点s的最短旅游子图。
34.s3、利用动态规划算法求解所述最短的汉密尔顿回路的图论问题,以构造出满足多料箱机器人仓库实际需求的最短汉密尔顿回路。利用动态规划算法求解所述最短汉密尔顿回路的图论问题是通过求解最短的旅游子图来实现。
35.具体的,根据改进后的多料箱机器人仓库存取货流程,机器人离开工作站第一个访问的货位点是s,所以如图3所示,所得的最短旅游子图一定要包括如一条连接顶点s与w的路。在求解最短的旅游子图的过程中,我们可以作出如下关于旅游子图、部分旅游子图的定义。
36.旅游子图:如果存在一个子图包含所有必须被访问的顶点ri、w和s,并且能用子图t中的弧和点恰好一次就得到一个完整的订单拣选与储存回路,则子图t为旅游子图。对于一个子图当且仅当:(1).所有必须被访问顶点ri、w和s在子图t上的度数都是正的;(2).除了零度的顶点,子图t是连通的;以及(3).子图t中的每个顶点都有偶数度或零度时,子图t是旅游子图。
37.部分旅游子图:设是图g的一个子图,包括巷道j左边的所有顶点和弧以及巷道j的上出入口aj与下出入口bj;也是图g的一个子图,包括了及巷道j内的所有弧和顶点;并将和都称为lj,也就是说,涉及lj之处,和均适用;如果存在一个图且tj∪cj是图g的旅游子图,则子图是一个部分旅游子图,其中cj是tj的补图。
38.在求解所述最短的旅游子图时,如果两个部分旅游子图拥有相同的补图,那么称
这两个部分旅游子图为等价的两个部分旅游子图;所述部分旅游子图被分为不同的等价类,每个所述等价类由三个元素组成,所述三个元素分别是:aj的度的奇偶、bj的度的奇偶、当前部分旅游子图的分支数量;从而得到共7个旅游子图的等价类,分别为:(u,u,1c),(e,0,1c),(0,e,1c),(e,e,1c),(e,e,2c),(0,0,0c),(0,0,1c),其中u代表度是奇数,e代表度是偶数,0c代表零个分支,1c代表一个分支,2c代表两个分支。
39.所述求解最短的旅游子图,包括:从仓库的最左边第一条巷道开始,实施动态规划:初始状态为空图把巷道内竖直方向的子图加入到中得到第一部分旅游子图将组合出的每个等价类的最短部分旅游子图保留,图4展示了所有巷道内的竖直方向的子图。在此基础上,将连接两个相邻巷道的水平方向的子图加到所述第一部分旅游子图中得到第二部分旅游子图将组合出的每个等价类的最短部分旅游子图保留;依次从左到右,按第1条巷道、第2条巷道、
…
、第m条巷道执行所述动态规划,得到旅游子图的不同的等价类的最短旅游子图,从等价类(e,0,1c),(0,e,1c),(e,e,1c)以及(0,0,1c)中选取最短的旅游子图,即为所述动态规划算法求解的所述最短汉密尔顿回路。
40.仍以图2所示仓库为例,巷道内竖直方向的子图1-14(图4中正方形框+数字代表竖直方向子图编号)分别组合到即可得到新的等价类别,从而可以得到从到的等价类,如表1:表1 等价类的所有结果及其构造来源
41.在此基础上,将连接两个巷道(当前实施动态规划的巷道与相邻的下一条即右侧巷道)的水平方向的子图加到部分旅游子图中得到部分旅游子图图5展示了所有巷道内的水平方向的子图(图5中长方形框+数字代表水平方向子图编号),我们可以得从到等价类的变动表,如表2:表2 等价类的所有结果及其构造来源
42.将组合出的每个等价类的最短部分旅游子图保留,依次从左到右,按第1条巷道、第2条巷道、
…
、第m条巷道执行所述动态规划,可得到旅游子图的不同的等价类的最短旅游子图,从等价类(e,0,1c),(0,e,1c),(e,e,1c)以及(0,0,1c)中选取最短的旅游子图,即为所述动态规划算法求解的所述最短汉密尔顿回路。需要注意的是是空图,本发明将竖直方向的组合加入到等价类(0,0,0c)中得到所有可能的的等价类,再基于次依次组合所有巷道的竖直方向和水平方向的子图,得到最短的旅游子图也即是最短的汉密尔顿回路。
43.其中,按照上述方法得到图2所示仓库的最短汉密尔顿回路,其所有的动态规划信息如表3所示:表3 动态规划过程中的所有信息动态规划过程中的所有信息
表3中的所有罗列的元素有三个成员组成,第一个成员是当前等价类的最短距离,第二个成员是组成该等价类的上一个部分旅游子图的类别,和组成该等价类的竖直或水平上的子图。破折号表示这个等价类是不可行的。我们在每个阶段的最短部分旅游子图元素下画线。所得到的最短汉密尔顿回路如图6所示。
44.s4、根据步骤s3构造的所述最短汉密尔顿回路,获取改进后的多料箱机器人存取货作业流程的最优路径。具体过程如下:
45.s41、所述多料箱机器人从工作站w出发;
46.s42、所述多料箱机器人按照最短的路到达所述存货点s;
47.s43、如果当前顶点附近有一对未使用的平行弧,则使用该对平行弧的其中一个弧来访问下一个顶点,到达下一个顶点后重复步骤s43;
48.s44、如果当前顶点附近有任何未使用的单弧,则使用其中一个单弧来访问下一个顶点,到达下一个顶点后重复步骤s43;
49.s45、如果有一对平行弧与当前顶点相邻,其中一条弧线仍未使用,则通过该条未使用的弧访问下一个顶点,到达下一个顶点后重复步骤s43;
50.s46、停止,所述多料箱机器人回到工作站w。
51.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1