一种养猪用智能转运电梯的控制系统与控制方法与流程
1.本发明涉及装运电梯的控制,具体涉及一种养猪用智能转运电梯的控制系统,本发明还涉及该控制系统的控制方法。
背景技术:
2.电梯使现代社会高层建筑的交通更加便利,电梯已成为人类不可缺少的运输设备。在养猪行业,由于受场地的限制,为了扩大养猪规模,人们开始采用立体式养猪,在不同的楼层(隔层)进行养猪,这样就能够在原场地扩大养猪规模,提高收益。在楼上楼下或楼内楼外转运猪时,使用的是轿厢式转运电梯,公开(告)号cn112693995a、cn214456034u,cn112693993a为申请人申请的相关转运设备。在比较大型的养猪企业,转运猪时就需要对各转运电梯进行有效的控制。现有的转运电梯所设计的控制系统功能较单一,无法满足立体平面空间的转运任务。
技术实现要素:
3.本发明所要解决的技术问题是提供一种养猪用智能转运电梯的控制系统及控制方法,利用该控制系统和控制方法可实现立体平面空间养猪的转运控制。
4.为解决上述技术问题,本发明所采取的技术方案是:一种养猪用智能转运电梯的控制系统,包括中控室的主控系统、协控系统、物联网通讯系统、供电系统,至少一个转运电梯;所述主控系统包括主plc控制器、hmi、主网桥,所述协控系统包括分plc控制器、多机传动变频器、分网桥,主控系统通过主网桥与协控系统的分网桥进行网络通讯向分plc下发控制转运电梯的指令命令,从而控制转运电梯在竖轨上升降,在天轨上平移,控制转运电梯的轿厢门能够向前翻转开,控制轿厢能水平倾斜范围45
°
内可调。
5.所述物联网通讯系统与主控系统连接,主控系统的主plc通过网口与物联网通讯系统通信将主plc整理的数据上传至物联网,外部设备通过物联网通讯系统进行无线网络控制或读取电梯运行状态;所述供电系统采用滑触线供电方式为系统提供电源。
6.还包括多自由度控制系统,多自由度控制系统与分plc控制器控制连接,主plc向分plc下发指令实现单台电梯上下、左右、轿厢翻转、翻转门翻转、推拉门开关、自动卸货多方位联动运行。
7.还包括坐标标定系统,坐标标定系统与分plc控制器控制连接,用户在转运电梯可到达的立体平面范围内任意选择一点进行转运电梯的坐标标定。
8.所述对转运电梯的坐标标定是通过使用槽型光电传感器、激光传感器、磁栅尺、磁感应式传感器中的一种或多种进行定位。
9.还包括坐标纠偏系统,坐标纠偏系统与分plc控制器控制连接,坐标纠偏系统是在电梯水平、垂直的运行路径上设置多个定位桩,通过多次运行记录下定位桩的坐标;在电梯
坐标出现误差的情况下经过定位桩,系统通过设置好的定位桩坐标进行补偿,自动校正当前坐标。
10.还包括自动卸货系统,自动卸货系统与分plc控制器控制连接,自动卸货系统包含转运电梯上的两个推赶电机、变频器;针对活体货物还增加了抽打电机和电铃组成赶猪机构,两个推杆电机分别是左右推赶,前后推赶,推赶板遇到障碍物时后退再前行,往复驱赶相互协调配合,自动将货物卸至电梯外。
11.本发明一种养猪用智能转运电梯的控制系统的控制方法,包括转运和转卸、厂内引种、厂外供种以及自动赶猪,各种运行流程分别应用于不同转运场景下;转运和转卸:(1).用户输入上猪位和卸猪位;(2).电梯通过升降平移到达上猪位;(3).转运电梯的平开门电机启动,平开门开启,将猪赶入电梯后,输入关门信号,平开门关闭;(4).转运:转运电梯到达卸猪位,输入开门信号,平开门开启,完成卸猪操作后,输入关门信号,转运流程结束;(5).转卸:转运电梯到达卸猪位,翻转门电机启动,翻转门打开,完成卸猪操作后,输入翻转门关门信号,转卸流程结束;厂内引种:(1).用户输入上猪位和卸猪位;(2). 转运电梯运行至上猪位,翻转门电机启动,翻转门打开,完成上猪操作后,输入翻转门关门信号;(3). 转运电梯运行至卸猪位,输入开门信号,平开门开启,待自动赶猪设备将猪赶出后,输入关门信号,平开门关闭,厂内引种流程结束;厂外供种:(1).用户输入上猪位和卸猪位;(2). 转运电梯运行至上猪位,平开门开启,完成上猪操作,输入关门信号;(3). 转运电梯运行至卸猪位,轿厢倾斜电机启动,轿厢开始倾斜,待猪被完全倒出,输入轿厢倾斜复位信号,轿厢复位完成,厂外供种流程结束;自动赶猪:(1).用户通过智能化设备下发自动赶猪指令;(2).机构a抽打电机、电铃相互配合向前赶猪,在运行途中遇到阻力大于设定的电机力矩时,机构a会先后退再向前,直至机构a运行到位;(3).机构b电铃响铃,向前赶猪,在运行途中遇到阻力大于设定的电机力矩时机构b会先后退再向前,直至机构b运行到位;(4).通过操作台下发赶猪复位指令,机构a、b相继复位,完成赶猪流程。
12.本发明采用上述技术方案所设计的一种养猪用智能转运电梯的控制系统与控制方法,具有以下有益效果:1.控制系统采用plc和多机传动系统,采用立式书本模块化设计,体积缩小60%,共直流母线能量分配,节约能耗5%—30%;
2.电梯定位打破了原有的电梯平层开关定位方式,采用电流、速度、位置三闭环控制实现了精准停车,其中位置环采用编码器采集电机运动信息,通过机械传动比换算电梯位置,实现位置半闭环控制。在横向跨度100米,纵向跨度30米,停靠点上百个的情况下,能够实现精准定位,误差不超过3毫米;3.物联网监控模式为用户提供了一种更为便捷的控制模式,用户可以随时随地进行实时监控,并对设备进行操作,在设备发生故障时能更加迅速的收到故障反馈;4.控制模式多样化,各控制模式通过主控柜主网桥和协控柜分网桥的连接,实现主plc和分plc的无线网络通讯,可以控制电梯在所需的运行模式下运行;5.控制方法种类多,操作简单;6.具有丰富的扩展性及兼容性,可无缝集成自动化系统。
附图说明
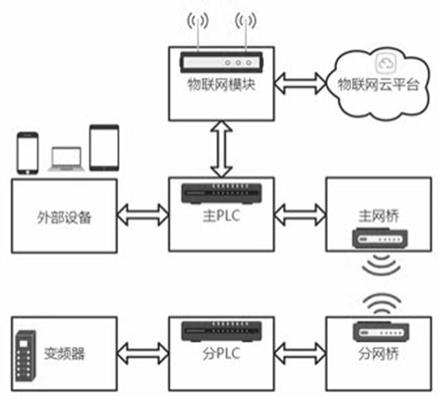
13.图1表示本发明智能转运电梯的网络拓扑图;图2表示本发明人机交互连接方式、无线局域网连接方式、物联网连接图;图3表示本发明主plc与主网桥间的通讯方框示意图;图4表示本发明自动卸货系统俯视结构示意图。
具体实施方式
14.下面结合附图对本发明一种养猪用智能转运电梯的控制系统与控制方法作具体说明。
15.本发明一种养猪用智能转运电梯的控制系统,参见图1至图4,包括中控室的主控系统、协控系统、物联网通讯系统(iot-wl300d物联网模块)、供电系统,至少一个转运电梯。主控系统包括am600主plc控制器、it7150e触摸屏hmi、主网桥,协控系统包括h3u-1616分plc控制器、md810多机传动变频器、分网桥。主控系统通过主网桥与协控系统的分网桥进行网络通讯向分plc下发控制转运电梯的指令命令,从而控制转运电梯在竖轨上升降,在天轨上平移,控制转运电梯的轿厢门能够向前翻转开,控制轿厢能水平倾斜范围45
°
内可调,使转运电梯与总控系统的数据实现无线传输。物联网通讯系统与主控系统连接,主控系统的主plc通过网口与物联网通讯系统通信将主plc整理的数据上传至物联网,外部设备通过物联网通讯系统进行无线网络控制或读取电梯运行状态。本发明外部设备包括平板电脑、手机、电脑或机器人等,实现远程调试、故障预判、实时监控设备运行状态。供电系统采用滑触线供电方式为系统提供电源,在防水防腐的同时,可以满足水平方向上多台电梯同时长距离运动,提高系统运行效率。本发明具有丰富的扩展性及兼容性,可无缝集成自动化系统:支持modbus-rtu总线、profibus-dp总线(可选配)、canopen总线及canlink总线,可选配profibus-dp转canopen网桥及100m速率ethercat工业以太网。通讯采用的户外级防水防尘防腐蚀的通讯网桥,能够适应各种恶劣环境,无线发射功率线性可调,根据需求调整传输距离、避免同频干扰,纯净5ghz频段,干扰更少,有效传输距离可达5公里。
16.本发明运用人机交互技术,触摸屏与plc主控系统,实现对整机系统的集中控制。运用大跨距多点位定位技术,在100多米的楼栋中实现,单梯最多63门洞、142停靠位准确定位,三梯363个停靠位。
17.本发明还包括多自由度控制系统,多自由度控制系统与分plc控制器控制连接,主plc向分plc下发指令实现单台电梯上下、左右、轿厢翻转、翻转门翻转、推拉门开关、自动卸货多方位联动运行。
18.本发明还包括坐标标定系统,坐标标定系统与分plc控制器控制连接,用户在转运电梯可到达的立体平面范围内任意选择一点进行转运电梯的坐标标定。对转运电梯的坐标标定是通过使用槽型光电传感器、激光传感器、磁栅尺、磁感应式传感器中的一种或多种进行定位。
19.在自动运行时,为避免电梯出现位置偏差,本发明还提供了一种坐标纠偏系统,坐标纠偏系统与分plc控制器控制连接,坐标纠偏系统是在电梯水平、垂直的运行路径上设置多个定位桩,通过多次运行记录下定位桩的坐标;在电梯坐标出现误差的情况下经过定位桩,系统通过设置好的定位桩坐标进行补偿,自动校正当前坐标。在坐标标定模式下,用户进行坐标定位操作,用户可以在电梯可到达的立体平面范围内任意选择一点进行坐标标定。操作方法是:通过任意一种控制模式选中坐标标定模式,将电梯运行到所需标定的位置,按下坐标标定按钮,将此点坐标上传至主plc中,电梯可以在已标定的坐标点进行自动运行。
20.本发明包括自动卸货系统,自动卸货系统与分plc控制器控制连接,自动卸货系统(赶猪系统)包含转运电梯上的两个推赶电机、变频器,增加了抽打电机和电铃组成赶猪机构,两个推杆电机分别是左右推赶,前后推赶,推赶板遇到障碍物时后退再前行,往复驱赶相互协调配合,自动将猪卸至电梯外。赶猪系统为智能转运设备电梯特有,在电梯轿厢里设置两个赶猪机构,实时调整警铃、皮鞭、声光报警、灯光,合理引导猪群的流向,达到智能赶猪;动态调整赶猪堵转力矩,当猪群阻挡赶猪机构超过设定力矩,赶猪机构后退数秒后继续赶猪,以保护猪,两台赶猪机构反复轮动直至将猪群赶出轿厢。
21.本发明还包含模拟称重系统,能够实时监控电梯载重量,当载重量超过额定载重量时,电梯会超载。
22.本发明一种养猪用智能转运电梯的控制系统的控制方法,包括转运和转卸、厂内引种、厂外供种以及自动赶猪,各种运行流程分别应用于不同转运场景下;转运和转卸:(1).用户输入上猪位和卸猪位;(2).电梯通过升降平移到达上猪位;(3).转运电梯的平开门电机启动,平开门开启,将猪赶入电梯后,输入关门信号,平开门关闭;(4).转运:转运电梯到达卸猪位,输入开门信号,平开门开启,完成卸猪操作后,输入关门信号,转运流程结束;(5).转卸:转运电梯到达卸猪位,翻转门电机启动,翻转门打开,完成卸猪操作后,输入翻转门关门信号,转卸流程结束;厂内引种:(1).用户输入上猪位和卸猪位;(2). 转运电梯运行至上猪位,翻转门电机启动,翻转门打开,完成上猪操作后,输入翻转门关门信号;
(3). 转运电梯运行至卸猪位,输入开门信号,平开门开启,待自动赶猪设备将猪赶出后,输入关门信号,平开门关闭,厂内引种流程结束;厂外供种:(1).用户输入上猪位和卸猪位;(2). 转运电梯运行至上猪位,平开门开启,完成上猪操作,输入关门信号;(3). 转运电梯运行至卸猪位,轿厢倾斜电机启动,轿厢开始倾斜,待猪被完全倒出,输入轿厢倾斜复位信号,轿厢复位完成,厂外供种流程结束;自动赶猪:(1).用户通过智能化设备下发自动赶猪指令;(2).机构a抽打电机、电铃相互配合向前赶猪,在运行途中遇到阻力大于设定的电机力矩时,机构a会先后退再向前,直至机构a运行到位;(3).机构b电铃响铃,向前赶猪,在运行途中遇到阻力大于设定的电机力矩时机构b会先后退再向前,直至机构b运行到位;(4).通过操作台下发赶猪复位指令,机构a、b相继复位,完成赶猪流程。
23.本发明控制系统可以应用到各种自动化楼房转运场景,所描述的猪场转运场景仅为实施例之一。
24.本发明自动运行模式包含待机点模式、单梯运行模式、双梯运行模式。系统默认运行方式为单梯运行模式,只允许一台电梯运行,在转运任务需求的情况下可以选中双梯运行模式,即两台电梯同时自动运行,在待机点模式下,选中一台需要操作的电梯,另外两台电梯自动返回设置好的待机点。
25.本发明可以通过多种控制模式进行控制,hmi顺控模式是最常用的一种控制模式,通常使用中控室hmi在厂内进行指令下发,在hmi顺控下用户可以通过操作界面直观的看到设备的运行状态。上位机控制模式是为第三方平台提供的一种控制模式,可以将电梯与手机、电脑、agv小车等智能化设备连接进行上位机操作。物联网监控模式为用户提供了一种更为便捷的控制模式,用户可以在此模式下随时随地进行实时监控,并对设备进行操作,在设备发生故障时能更加迅速的收到故障反馈。呼梯盒控制模式是最简单的控制模式,用户可以通过轿厢上的按钮来进行转运操作,这种操作模式通常用于在人员不便使用以上三种控制模式的情况下,完成设备的全部运行流程。
26.上述控制模式通过主控柜主网桥和协控柜分网桥的连接,实现主plc和分plc的无线网络通讯,物联网平台系统通过物联网模块iot-wl300d与电梯系统连接实现设备的远程操作、监控、上传下发数据。触摸屏hmi与plc系统构成人机界面和主控系统,实现对整个转运设备的控制,主控plc收集各种数据后对信息进行集中处理,将故障、设备状态通过触摸屏显示;触摸屏的操作通过主控plc处理后发送至协控柜plc进行下一步处理,协控柜plc接收到指令进行执行;协控柜通过对电梯的信号采集向主控plc上传数据,实现对整个系统的控制。
27.以上控制模式可以控制电梯在所需的运行模式下运行,控制系统包含多种运行模式,在检修模式下,通过中控室hmi可以选中一台或多台电梯,控制电梯检修运行,进行升降、平移运动。针对一台电梯可以进行轿厢倾斜、翻转门翻转、开关门操作。自动运行是设备最常用的一种模式,在自动运行模式前需要对各台电梯通过hmi进行参数设置,通过设置电
机运行保护时间、软限位等参数,保障电梯安全运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1