一种盖玻片吸片装置及其控制方法与流程
1.本技术涉及封片机技术领域,尤其是涉及一种盖玻片吸片装置及其控制方法。
背景技术:
2.目前随着医学技术的逐渐进步,在医学领域中,为了便于显微镜对细胞的观察,需要制备样品玻片,通常采用封片机制备样品玻片。
3.样品玻片包括载玻片、样品、盖玻片,盖玻片通常具有弹性,封片机从装有众多盖玻片盒子里通过吸盘将盖玻片吸取后,再利用转动的方式将吸取后的盖玻片盖在装有样品的载玻片上,以完成样品玻片的制备。
4.发明人认为:在将盖玻片从盒子内吸取的过程中,一旦盖玻片出现粘连或破损,封片机的吸盘容易将多片盖玻片或者碎裂的盖玻片吸取,然后盖在载玻片上容易产生气泡,从而容易导致碎片或盖片途中掉落造成卡片或机械故障。
技术实现要素:
5.为了降低封片机在盖片过程中的故障率,本技术的目的是提供一种盖玻片吸片装置及其控制方法。
6.一方面,本技术提供的一种盖玻片吸片装置采用如下的技术方案:一种盖玻片吸片装置,包括机架、滑动设置于所述机架上的滑座、设置于所述滑座下方的载物盒,所述载物盒用于盛装盖玻片,所述滑座上设有封片头,所述封片头上设有吸附盖玻片的吸附装置,所述机架上设有驱动所述滑座沿竖直方向滑移的驱动件一,所述封片头的底壁设有检测盖玻片是否粘连和破损的检测传感器,所述检测传感器包括互不相同通的第一回路和第二回路,所述吸附装置吸附盖玻片时,所述第一回路和第二回路和盖玻片相接触。
7.通过采用上述技术方案,当将盖玻片进行吸取时,驱动件一驱动滑座带动封片头向下滑动,封片头带动吸附装置一同下移。直至封片头上的吸附装置伸入载物盒内,吸附装置将载物盒内的盖玻片吸附后,使得盖玻片紧贴检测传感器,检测传感器上的第一回路和第二回路与盖玻片相接触。检测传感器是通过高速充放电的形式,测试充放电的时间来判断盖玻片的厚度检测,并通过单张盖玻片接触在第一回路和第二回路上形成的电容值,使得检测传感器检测到电容值后并与标准的电容值进行比较,以检测出吸附装置吸附起单张盖玻片。而吸附的盖玻片相互粘连或破损,均会导致盖玻片的介质系数改变,导致第一回路和第二回路之间的电容值改变,以检测出吸附装置吸附的盖玻片有误。因此通过设置检测传感器,利用第一回路和第二回路的高速充放电,使得盖玻片单张且完好才能将第一回路和第二回路之间的电容值和标准的电容值相同,以检测出吸附装置吸附的单张完整的盖玻片,反之多张盖玻片或盖玻片有破损均将改变第一回路和第二回路之间的电容值,以便于将吸附装置吸附的破损的盖玻片或多张盖玻片筛选出来,从而降低封片机在盖片过程中的故障率。
8.可选的,所述吸附装置包括设置于所述封片头底部并伸入载物盒内吸附盖玻片一端的吸盘一、吸附盖玻片另一端的吸盘二、驱动吸盘一和吸盘二分别吸附的驱动件二,所述检测传感器位于吸盘一和吸盘二之间。
9.通过采用上述技术方案,当封片头带动吸盘一和吸盘二伸入载物盒内时,驱动件二启动将吸盘一和吸盘二抽真空,以形成负压将盖玻片吸附后,使得检测传感器紧贴盖玻片对盖玻片进行检测,从而便于将盖玻片从在载物盒内吸取至检测传感器上。
10.可选的,所述驱动件二包括设置于所述滑座上的两路电磁阀、连接于所述吸盘一的吸杆、连接于吸盘二的连接软管,所述吸杆和连接管的上端均延伸入滑座内受两路电磁阀控制抽气。
11.通过采用上述技术方案,当驱动吸盘一和吸盘二吸附盖玻片时,两路电磁阀可分开控制吸盘一和吸盘二抽真空,以使从吸盘一抽的空气经过吸杆、从吸盘二抽的空气经过连接软管,以便于吸盘一和吸盘二形成负压对盖玻片进行吸附。
12.可选的,所述封片头铰接于滑座上,所述吸盘一和吸盘二均具有弹性,所述吸杆靠近滑座设置,所述封片头内开设有避让槽,所述避让槽用于供封片头转动时对吸杆进行避让,所述滑座底部设有抵接封片头限制其向下转动的限位部、抵接封片头限制其向上转动的定位部,所述封片头在限位部和定位部的限制范围之间转动。
13.通过采用上述技术方案,当驱动件一带动滑座和封片头下移时,封片头抵接于限位部,封片头底部的吸盘一和吸盘二伸入载物盒内和盖玻片相抵接,使得吸盘一和吸盘二压缩。同时封片头在吸盘一和吸盘二抵接盖玻片后随滑座的下滑而向上转动,使得吸杆相对于封片头于避让槽内转动。以使封片头脱离抵接部,直至抵接至定位部。封片头在限位部和定位部的限制范围转动过程中,通过吸盘一和吸盘二的压缩,使得驱动件一带动滑座下滑具有缓冲距离,从而减少封片头下滑抵接盖玻片对盖玻片造成的损伤。
14.可选的,所述封片头的底部呈弧形,所述吸杆的下端朝远离吸盘二的方向倾斜设置,所述载物盒倾斜并可拆卸设置于机架上。
15.通过采用上述技术方案,当吸盘一和吸盘二抵接于盖玻片时,两路电磁阀控制吸盘一和吸盘二形成真空,以将盖玻片吸附于吸盘一和吸盘二上,使得吸附的盖玻片在倾斜的吸杆设置下。盖玻片受到吸附后紧贴封片头,并贴合于弧形的封片头底部,进而使得盖玻片再受到吸盘一和吸盘二的吸附后,盖玻片的两端先向上翘起脱离下方堆叠的盖玻片,使得单张盖玻片产生弯曲形变后脱离堆叠的其他盖玻片,从而便于吸盘一和吸盘二从堆叠的盖玻片中吸附单张盖玻片。
16.可选的,所述滑座上设有行程传感器,所述封片头远离避让槽的一端设有伸入行程传感器内的挡片,所述滑座内设有控制驱动件一启停的控制器,所述行程传感器受到挡片的阻挡后将阻挡信号发送至控制器,所述控制器响应阻挡信号后控制驱动件一停止对滑座进行驱动,所述吸盘一和吸盘二处于压缩并抵紧于盖玻片的状态。
17.通过采用上述技术方案,当驱动件一带动滑座和封片头下移时,吸盘一和吸盘二伸入载物盒内和堆叠的盖玻片接触。使得吸盘一和吸盘二受到挤压后压缩,以使吸杆相对于封片头在避让槽内转动,使得封片头靠近吸盘二的一端向上转动。进而带动封片头上的挡片上移入行程传感器内,行程传感器受到遮挡后将阻挡信号发送至控制器,控制器响应阻挡信号后控制驱动件一停止对滑座的驱动,进而停止封片头的下滑。然后压缩的吸盘一
和吸盘二吸附盖玻片后,检测传感器对盖玻片进行检测,驱动件一再启动带动滑座和封片头上移,以将吸附的单张盖玻片和吸盘一、吸盘一脱离载物盒,以便于将载物盒从机架上取下。因此通过设置行程传感器,利用挡片随封片头的转动而作用于行程传感器上,使得驱动件一驱动滑座的滑动受到控制,以实现吸盘一、吸盘二压缩抵紧于盖玻片后停止驱动件一的驱动,从而便于驱动件一自动停止对滑座的驱动。
18.可选的,所述滑座底部设有弹簧,所述弹簧的下端设置于封片头顶壁,所述弹簧用于抵动封片头下转和限位部抵接。
19.通过采用上述技术方案,当驱动件一带动滑座和封片头下滑时,弹簧作用于封片头上,使得封片头和限位部抵接,以将封片头向下转动至极限的位置进行固定,减少封片头在随滑座滑动的过程中产生的滑动,同时也便于封片头上转后的复位,从而提高封片头随滑座滑移的稳定性。
20.可选的,所述封片头的侧壁上设有限位柱,所述机架上设有抵接限位柱的限位条,所述限位柱抵接限位条时,所述封片头带动吸盘二向上转动,并将封片头和定位部抵接、挡片伸入行程传感器内。
21.通过采用上述技术方案,当将盖玻片进行检测后,两路电磁阀控制并释放掉吸盘二的真空,以解除吸盘二对盖玻片的吸附,使得吸盘一吸附盖玻片。驱动件一带动滑座和封片头再次下滑,直至封片头上的限位柱抵接于机架上的限位条后,带动封片头绕着和滑座铰接的铰接轴向上转动,以使检测传感器被挂起处于向上倾斜的状态,此刻吸盘一上的盖玻片仍处于倾斜的状态。封片头转动后带动挡片再次转入行程传感器内,控制器控制驱动件一停止对滑座的驱动,以使吸盘一上的盖玻片随封片头移动至载玻片上时停止下移。然后两路电磁阀控制并释放掉吸盘一的真空,解除吸盘一对盖玻片的吸附,盖玻片下端先覆盖于载玻片上后上端再覆盖,以使盖玻片倾斜覆盖于载玻片上。因此通过设置限位柱和限位条,使得吸盘一在释放掉真空将盖玻盘倾斜覆盖于载玻片上之前,封片头向上转动使得检测传感器转离载玻片,以避免检测传感器与胶或试剂接触而受到损环,从而便于在盖上盖玻片时减少检测传感器受到的污染或损坏。
22.另一方面,本技术还提供一种双吸盘头的控制方法,包括以下步骤:步骤s1:驱动件一驱动滑座带动封片头下滑至吸盘一、吸盘二伸入载物盒内;步骤s2:吸盘一和吸盘二抵接盖玻片后,封片头转动将挡片伸入行程传感器内,驱动件一停止驱动;步骤s3:驱动件二启动形成真空负压将盖玻片的两端分别吸附于吸盘一、吸盘二上,可以同时吸附也可分开单独吸附,并将检测传感器贴合至盖玻片上进行检测,单片盖玻片抵接第一回路和第二回路形成标准的电容值,破碎、多片盖玻片抵接第一回路和第二回路形成不标准的电容值;步骤s4:吸附单张完整盖玻片后,驱动件二单独控制吸盘二释放真空,盖玻片处于吸盘一吸附的单吸盘状态;步骤s5:驱动件一驱动封片头上移后将载物盒拆卸,然后驱动件驱动单吸状态的封片头带动吸盘一和盖玻片下移;步骤s6:直至封片头上的限位柱和限位条抵接,带动封片头靠近吸盘二的一端和检测传感器向上倾斜,吸盘一处于封片头的最下端后驱动件一停止驱动,驱动件二驱动吸
盘一释放真空将盖玻片倾斜覆盖于载玻片上。
23.通过采用上述技术方案,驱动件一驱动滑座带动封片头下滑,使得吸盘一和吸盘二压缩抵紧于载物盒内的盖玻片时,封片头向上转动将挡片转入行程传感器内,驱动件一停止对滑座的驱动。吸盘一和吸盘二吸附盖玻片后,检测传感器对盖玻片检测,确认吸附的是单张却完好的盖玻片后,吸盘二松开对盖玻盘的吸附,驱动件一带动滑座上滑,以将吸附的盖玻片脱离载物盒。然后将载物盒拿掉,驱动件一再带动滑座和封片头下滑,直至限位柱抵接于限位条,带动封片头再次向上转动,以使封片头底部的检测传感器远离载玻片并处于倾斜状态。同时挡片再次伸入行程传感器内,控制器控制驱动件一停止驱动,以将吸盘一上的盖玻片倾斜停止于载玻片上方,吸盘一松开对盖玻片的吸附,以将盖玻片倾斜覆盖于载玻片上,完成单张盖玻片自动吸附后覆盖于载玻片上。因此通过设置吸盘一和吸盘二,利用封片头的铰接,使得吸盘一和吸盘二的吸附和释放模拟人手操作,将单张盖玻片倾斜覆盖于载玻片,实现盖玻片的自动覆盖,从而提高试验的精准性。
24.可选的,所述步骤s3中,所述驱动件二先驱动吸盘二形成真空后再驱动吸盘一形成真空,将盖玻片倾斜的下端先吸附后再吸附上端。
25.通过采用上述技术方案,吸盘二先吸附盖玻片的下端,使得盖玻片上端受到吸盘一的抵紧时,盖玻片的下端翘起并和下方堆叠的盖玻片分离,以使盖玻片弯曲产生形变。然后吸盘一再吸附盖玻片,从而便于将单张盖玻片从堆叠的盖玻片中分离。
26.综上所述,本技术包括以下至少一种有益技术效果:通过设置检测传感器,利用第一回路和第二回路的高速充放电,使得盖玻片单张且完好才能将第一回路和第二回路之间的电容值和标准的电容值相同,以检测出吸附装置吸附的单张完整的盖玻片,反之多张盖玻片或盖玻片有破损均将改变第一回路和第二回路之间的电容值,以便于将吸附装置吸附的破损的盖玻片或多张盖玻片筛选出来,从而降低封片机在盖片过程中的故障率;通过设置吸盘一和吸盘二,利用封片头的铰接,使得吸盘一和吸盘二的吸附和释放模拟人手操作,将单张盖玻片倾斜覆盖于载玻片,实现盖玻片的自动覆盖,从而提高试验的精准性;通过设置行程传感器和挡片,利用挡片随封片头的转动而作用于行程传感器上,使得驱动件一驱动滑座的滑动受到控制,以实现吸盘一、吸盘二压缩抵紧于盖玻片后停止驱动件一的驱动,从而便于驱动件一自动停止对滑座的驱动;通过设置限位柱和限位条,使得吸盘一在释放掉真空将盖玻盘倾斜覆盖于载玻片上之前,封片头向上转动使得检测传感器转离载玻片,以避免检测传感器与胶或试剂接触而受到损环,从而便于在盖上盖玻片时减少检测传感器受到的污染或损坏。
附图说明
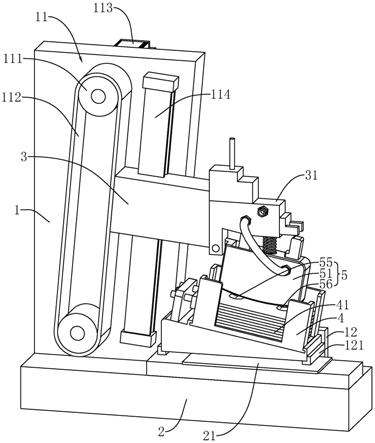
27.图1是本技术实施例一种盖玻片吸片装置的整体结构示意图。
28.图2是本技术实施例用于展示吸盘一和吸盘二的结构示意图。
29.图3是本技术实施例用于展示检测传感器的结构示意图。
30.图4是本技术实施例用于展示限位柱的机构示意图。
31.图5是图4中a部分的放大示意图。
32.图6是本技术实施例一种盖玻片吸片装置的控制方法的流程图。
33.附图标记说明:1、机架;11、驱动件一;111、转动辊;112、皮带;113、电机;114、导轨;12、支撑板;121、支撑杆;13、限位条;2、支撑台;21、载玻片;3、滑台;31、滑座;311、负压入口;312、限位部;313、定位部;314、弹簧;32、行程传感器;321、挡槽;4、载物盒;41、盖玻片;5、吸附装置;51、封片头;511、避让槽;512、挡片;513、限位柱;52、两路电磁阀;53、吸杆;54、连接软管;55、吸盘一;56、吸盘二;57、检测传感器;571、第一回路;572、第二回路。
具体实施方式
34.以下结合附图1-6对本技术作进一步详细说明。
35.本技术实施例公开一种盖玻片吸片装置及其控制方法。
36.参照图1,一种盖玻片吸片装置包括机架1、固定连接于机架1底部的支撑台2、滑动安装于机架1上沿竖直方向滑移于支撑台2上方的滑台3,机架1上位于支撑台2和滑台3之间还可拆卸安装有载物盒4,载物盒4内堆积的盖玻片41呈倾斜状态。
37.参照图1,载物盒4内堆叠有若干盖玻片41,滑台3上固定连接有滑座31,滑座31上安装有将载物盒4内单张盖玻片41吸附的吸附装置5,支撑台2上放置有载玻片21,机架1上还安装有驱动滑台3带动滑座31上下滑移的驱动件一11。
38.参照图1,驱动件一11包括竖直并排转动连接于机架1上的转动辊111、张紧套设在转动辊111上的皮带112、固定于机架1上同轴连接于其中一个转动辊111的电机113,滑台3固定连接于皮带112上。且机架1上固定连接有滑动贯穿滑台3的导轨114,以通过转动辊111的转动带动皮带112运动,使得滑台3沿着导轨114在竖直方向滑移,皮带112和导轨114均朝支撑台2的方向倾斜设置。
39.参照图1,机架1上位于支撑台2的一侧固定连接有支撑板12,支撑板12两端的侧壁上固定连接有承接载物台底壁的支撑杆121,支撑杆121沿垂直于滑台3滑移的方向延伸,以便于将载物盒4水平移动后脱离滑座31的滑动路径,滑座31滑移于支撑杆121之间,参照图1,吸附装置5包括固定连接于滑座31上放的驱动件二、铰接于滑座31下端的封片头51、穿设于封片头51底部的吸盘一55和吸盘二56,驱动件二控制控制空气压缩机将吸盘一55和吸盘二56抽真空形成负压。吸盘一55和吸盘二56均采用具有弹性的风琴式吸盘,且能够于封片头51内产生压缩形变。
40.参照图1和图2,封片头51靠近导轨114的上端和滑座31下端铰接,吸盘一55靠近封片头51和滑座31的铰接轴设置,吸盘二56位于封片头51远离吸盘一55的一端。
41.参照图1和图2,驱动件二包括固定连接于滑座31顶壁上的两路电磁阀52、倾斜固定连接于滑座31内的吸杆53和连接软管54,吸杆53下端朝靠近导轨114的方向倾斜延伸入封片头51内和吸盘一55连通,连接软管54一端固定连接于滑座31的侧壁、另一端穿设于封片头51侧壁后和吸盘二56连通。
42.参照图1和图2,滑座31上开设有负压入口311,以通过两路电磁阀52控制空气压缩机将从负压入口311处对吸杆53和连接软管54处抽取空气,使得吸盘一55和吸盘二56形成负压,以便于两路电磁阀52单独控制吸盘一55吸附盖玻片41或吸盘二56吸附盖玻片41。
43.参照图1和图2,吸杆53一下端贯穿封片头51和吸盘一55连通,使得吸盘一55的吸口端面和载物盒4内盖玻片41的表面相平行,且封片头51内开设有避让槽511,避让槽511用
于供封片头51转动时对吸杆53进行避让,以使封片头51能够带动吸盘二56进行转动。
44.参照图2和图3,封片头51的底壁呈弧形,封片头51的底壁嵌入有检测传感器57,检测传感器57位于吸盘一55和吸盘二56之间。检测传感器57包括来回弯曲的第一回路571和第二回路572,第一回路571和第二回路572互不连通,且第一回路571和第二回路572相互间隔设置。也可以采用将第一回路571和第二回路572直接嵌设在封片头51的底壁上,从而实现耐碰撞、耐腐蚀的效果。
45.参照图1和图2,检测传感器57是通过高速充放电的形式,测试充放电的时间来判断盖玻片41的厚度。检测传感器57能够通过第一回路571和第二回路572与单张完好的盖玻片接触后,使得第一回路571和第二回路572之间形成的电容值和标准电容值进行比较。
46.参照图2和图3,当检测到单张完好无损的盖玻片41时,第一回路571和第二回路572之间的电容值和标准电容值相同,封片头51继续进行下一步操作;当检测到破损的盖玻片41或着多张盖玻片41后,第一回路571和第二回路572之间的电容值与标准电容值不同,封片头51上的吸盘一55和吸盘二56将有误的盖玻片41释放。
47.参照图4和图5,滑座31的下端开设有抵接封片头51的限位部312和定位部313,限位部312抵接封片头51限制其向下转动,定位部313抵接封片头51限制其向上转动,以通过限位部312和定位部313对封片头51的转动范围进行限制。
48.参照图4和图5,滑座31的底部固定连接有弹簧314,弹簧314的下端固定连接于封片头51的顶壁,以通过弹簧314的弹力抵动封片头51向下转动并和限位部312抵接,使得封片头51在滑座31上随滑台3稳定下滑。
49.参照图1和图4,滑座31远离滑台3的侧壁上固定连接有行程传感器32,封片头51的顶壁固定连接有挡片512,挡片512位于封片头51的上方,行程传感器32上设有供挡片512伸入的挡槽321,且滑座31上还安装有控制器。挡片512随封片头51转入挡槽321内后,行程传感器32将阻挡信号发送至控制器,控制器响应阻挡信号后控制电机113停止驱动,以将滑台3、滑座31的滑动停止。当吸盘一55和吸盘二56抵紧盖玻片41产生压缩形变后,滑座31继续下滑会带动封片头51上转将挡片512伸入挡槽321内,以将电机113的驱动停止,从而使得滑座31不再继续下滑。
50.参照图1和图4,封片头51背对连接软管54的一侧固定连接有限位柱513,机架1的侧壁上固定连接有抵接限位柱513底壁的限位条13,限位条13水平延伸至限位柱513的下方,限位柱513抵接限位条13能够带动封片头51向上转动,使得检测传感器57脱离盖玻片41后处于倾斜向上的状态。直至挡片512伸入挡槽321内后,行程传感器32检测到后控制器控制电机113停止驱动,以使封片头51倾斜向上的状态固定,并且此时吸盘一55吸附的盖玻片41上端,使得盖玻片41远离吸盘一55的一端倾斜向下,以便于吸盘一55松开盖玻片41后覆盖于载玻片21上。
51.本技术实施例一种盖玻片吸片装置的实施原理为:当将盖玻片41吸附后盖在载玻片21上时,电机113带动滑台3和滑座31下滑,使得封片头51带动吸盘一55和吸盘二56下滑。直至吸盘一55和吸盘二56压紧在载物盒4的盖玻片41上后,封片头51上转,使得挡片512伸入行程传感器32内,控制器控制电机113停止驱动,滑座31、封片头51停止下滑。然后两路电磁阀52控制吸盘二56先吸附后吸盘一55再吸附,以将盖玻片41吸附在封片头51底部紧贴检测传感器57。检测传感器57检测到单片切完好无损的盖玻片41后封片头51继续动作,若是
检测到多片、有破损的盖玻片41后两路电磁阀52控制吸盘一55和吸盘二56将有误的盖玻片41释放,以对盖玻片41进行筛选。然后吸盘二56松开对盖玻片41吸附,电机113带动滑座31和封片头51上移,以将吸盘一55上的盖玻片41脱离载物盒4。将载物盒4取走后,电机113带动滑座31和封片头51下滑,直至限位柱513抵接于限位条13使得封片头51向上转动后将检测传感器57挂起,使得检测传感器57处于倾斜向上状态。同时挡片512再次伸入行程传感器32内,控制器响应后控制电机113停止,以将位于载玻片21上方的倾斜盖玻片41固定,松开吸盘一55,将盖玻片41以倾斜的方式覆盖于载玻片21上。在吸附盖玻片41的过程中,检测传感器57检测出吸附的单张完整的盖玻片41,反之多张盖玻片41或盖玻片41有破损均将改变第一回路571和第二回路572之间的电容值,以便于将吸附装置5吸附的破损的盖玻片41或多张盖玻片41筛选出来,从而降低封片机在盖片过程中的故障率。
52.本技术实施例还公开的一种盖玻片吸片装置的控制方法。
53.参照图4和图6,将载物盒4放在支撑杆121上,以使堆叠在载物盒4内的盖玻片41处于倾斜状态。然后启动电机113,通过转动辊111、皮带112的传动带动滑台3和滑座31沿着导轨114上下滑移。进而带动封片头51下滑,直至吸盘一55和吸盘二56伸入载物盒4。
54.吸盘一55和吸盘二56抵紧于载物盒4内的盖玻片41并产生压缩,且在电机113继续驱动的情况下,封片头51在盖玻片41的抵接下向上转动。以将封片头51上的挡片512转入行程传感器32的挡槽321内,行程传感器32将阻挡信号发送至控制器,控制器响应阻挡信号后控制电机113停止驱动。
55.两路电磁阀52控制空气压缩机产生的负压经过吸杆53和连接软管54,可以同时控制吸盘一55和吸盘二56吸附,也可以分开单独控制其中一个进行吸附。以使吸盘二56形成负压后,吸盘一55才形成负压,以实现吸盘二56先将盖玻片41吸附后,吸盘一55再吸附。吸附后的盖玻片41紧贴检测传感器57,检测传感器57的第一回路571和第二回路572与盖玻片41接触,单张且完好的盖玻片41使得第一回路571和第二回路572之间的电容值与标准电容值相同,多张或有破损的盖玻片41将第一回路571和第二回路572的电容值改变,以将粘接有多张或有破损的盖玻片41筛选出来。
56.检测完盖玻片41后,两路电磁翻控制吸盘二56松开对盖玻片41下端的吸附,以使盖玻片41恢复形变后在吸盘一55上处于倾斜的状态,以使盖玻片41处于单吸盘状态,同时盖玻片41脱离检测传感器57。
57.电机113再启动带动滑座31、封片头51上移,以将吸附的单张完好无损的盖玻片41移出载物盒4,然后将载物盒4沿水平方向于支撑杆121上滑离封片头51的滑动路径。电机113再反转带动滑座31、封片头51下移,以带动吸附有盖玻片41的吸盘一55下移。
58.直至封片头51上的限位柱513抵接于限位条13,使得限位柱513受到限位条13的抵接后带动封片头51上转,带动吸盘二56这一端的封片头51向上转动,以使检测传感器57转离支撑台2上的载玻片21并处于倾斜状态。同时挡片512再次伸入行程传感器32内,控制器再控制电机113停止驱动,以将远离载玻片21的检测传感器57位置固定,避免检测传感器57与胶或试剂接触而受到损坏。最后两路电磁阀52控制吸盘一55松开对盖玻片41的吸附,以使盖玻片41倾斜的覆盖于载玻片21上。使得吸盘一55和吸盘二56的吸附和释放模拟人手操作,将单张盖玻片41倾斜覆盖于载玻片21,实现盖玻片41的自动覆盖,从而提高试验的精准性。
59.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1