振动翻转机及抛丸设备的制作方法
1.本发明涉及一种振动翻转机及抛丸设备。
背景技术:
2.在工业生产中,许多工件需要进行金属表面去砂,除锈,强化等处理。对于大批量生产的扁平形状工件进行在线表面处理时,就需要对工件进行准确地翻转。对于大批量生产的扁平类铸件进行抛丸处理,通常只能通过旋转,摆动等方式进行翻转抛丸,这样处理成本高,耗时多,费人工。例如悬挂式抛丸机,一般采用人工把工件摆放在有悬链牵引的吊具上或者直接挂在有吊钩的挂篮上,吊具或挂篮一边前进一边自转通过一个个处理工位,以使各个工件表面都处理到,最后还得用人工从挂篮上取下处理后的工件。又如摆床式抛丸机机及履带式抛丸机,通过抛丸装置的摆动或旋转,实现工件自由、无序的翻转,因此需更长时间,更多成本才能将工件清理干净。因此如何能用简单、高效的方法解决工件准确翻转,完成工件表面处理任务成为亟待解决的任务。
3.首先通过图1示出的方式,由振动床直接输送,工件通过自由下落的方式,实现工件的翻转,但是此种方式无法保证工件跌落后的实现准确地翻转,同时自由下落会对工件的产生相应的损伤。
4.还有一种是通过图2示出的方式,是在自由下落的基础上,增加竖向的挡板,通过竖向挡板的约束,以约束工件进行翻转。虽然相对于上面无约束的方式多了约束挡板,能够使一部分工件实现翻身动作,但是不同尺寸的工件受限于挡板至振动床出口距离以及下落高度调整困难,仍然不能实现准确地翻转。
技术实现要素:
5.针对上述技术问题,本发明的目的是提供一种能够实现在线、批量化实现工件翻转动作,适用大规模抛丸生产的振动翻转机及抛丸设备。
6.实现本发明的技术方案如下
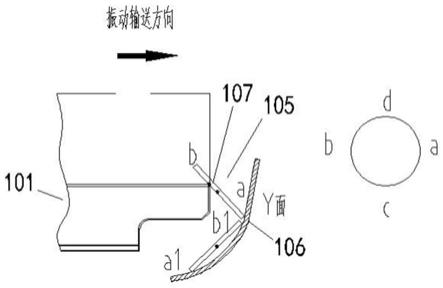
7.振动翻转机,包括振动床,在振动床的末端或侧部设置有翻转通道,翻转通道包括内侧面为滑移曲面的翻转部,在重力作用下,从振动床送来的工件一端与滑移曲面接触,沿着滑移曲面向下滑移,以引导工件的上表面翻转贴靠滑移曲面,并沿着滑移曲面向滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。
8.当翻转通道处于振动床末端时,翻转通道布置于振动床出料口的外侧,翻转部的内侧面正对着振动床出料口;工件的最前端与翻转部的内侧面接触形成支点一,工件的后端于振动床上形成支点二;工件前行过程中,工件的最前端沿着滑移曲面向下滑移,在工件的重心偏向翻转部一方时,工件的后端脱离振动床,工件的上表面则向翻转部的内侧面贴靠,并沿着内侧面向滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。
9.当翻转通道处于振动床侧部时,翻转部设置于振动床中,翻转部的内侧面布置方向与振动床的送料方向相同;在振动床内设置有送料背脊,翻转部处于送料背脊的下方,翻
转部的端部向送料背脊侧面延伸,翻转通道形成于送料背脊与翻转部的内侧面之间;在送料背脊的侧面边缘与翻转部内侧面之间沿着送料方向形成开口逐渐增大的渐变通道;工件倾斜状态进入翻转通道时,工件的上端与送料背脊外侧接触形成支点一,工件的下端与翻转部的内侧面接触形成支点二;工件前行过程中,工件的下端沿着滑移曲面向下滑移,随着渐变通道的逐渐增大,工件的重心逐步朝向翻转部一方偏移,当工件重心偏移到翻转部一方时,工件的上表面向翻转部的内侧面贴靠,并沿着内侧面向滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。
10.振动床内设置有第一引导区、第二引导区,进入振动床的工件依次通过第一引导区、第二引导区,呈竖立角度逐渐增大的进入翻转通道中。
11.第一引导区包括第一斜滑板、与第一斜滑板形成夹角布置的第一边斜板,第一斜滑板与第一边斜板之间形成第一引导通道;
12.第二引导区包括第二斜滑板、与第二斜滑板形成夹角布置的第二边斜板,第二斜滑板与第二边斜板之间形成第二引导通道;
13.第一边斜板的内侧面不低于第二边斜板的内侧面;
14.第一斜滑板的倾斜角度小于第二斜滑板的倾斜角度。
15.第一斜滑板与第一边斜板之间形成90
°
或90
°
以上夹角;第二斜滑板与第二边斜板之间形成90
°
或90
°
以上夹角。
16.送料背脊的外侧面高度不高于第二边斜板的内侧面,翻转部的内侧面不高于第二斜滑板的内侧面;
17.送料背脊的下方为供经过渐变通道翻身后的工件滑入的放料空间;从第二引导区进入翻转通道中的工件,工件的下端沿着滑移曲面向下滑移,随着渐变通道的逐渐增大,工件的重心逐步朝向翻转部一方偏移,当工件重心偏移到翻转部一方时,工件的上表面向翻转部的内侧面贴靠,并沿着内侧面向滑移曲面低处滑移,使工件上表面翻转到下方,进入放料空间中。
18.送料背脊布置于振动床中部,送料背脊沿着振动床的送料方向进行延伸布置,在送料背脊的两侧分别设有翻转通道。
19.翻转部为u形状,送料背脊为倒u形状,送料背脊处于翻转部内的中部上方,呈悬空状布置。
20.抛丸设备,包括上级抛丸机、下级抛丸机,在两级抛丸机之间布置有上述的振动翻转机;振动翻转机的接料端对接上级抛丸机的出料口,振动翻转机的出料端对接下级抛丸机的进料口,通过振动翻转机将上级抛丸机排出的工件翻身后,送入到下级抛丸机中。
21.采用了上述技术方案,在振动床的末端或侧部设置有翻转通道,翻转通道包括内侧面为滑移曲面的翻转部,在重力作用下,从振动床送来的工件一端与滑移曲面接触,沿着滑移曲面向下滑移,以引导工件的上表面沿着滑移曲面向下滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。通过翻转部的设置,翻转部内侧面的滑移曲面,由振动床振动输送而来的工件,工件的一端与翻转部的内侧面形成接触形成向下滑移动作,通过重力、滑移曲面的引导,当工件的重心偏向翻转部时,工件朝向翻转部一方形成翻转,工件的上表面贴着翻转部的内侧面向下滑移,最终使工件的上表面翻转到下方,实现工件的翻身动作,以此确保工件能够实现翻身动作。本发明使用过程中,通过振动床的振动提供工
件前行力,工件依次进入翻转通道中,自动翻转,无需工作人员操作,降低人工使用成本,且降低劳动强度,提升生产效率,适用于在线式、批量化、规模化的生产工作。本技术翻转机的研发,提供了一种经济(结构合理、简单、所需部件少、制造成本低),高效(能够在线式工作、流程短、批量化连续式翻转),准确(能够保证每个工件均实现翻身动作)的振动翻转机,解决了工件在线准确翻转的问题,适用于抛丸设备等应用场合。
附图说明
22.图1为现有技术中工件一种方式的翻转示意图;
23.图2为现有技术中工件另一种方式的翻转示意图;
24.图3为实现本发明翻转工作的一种实施方式结构示意图;
25.图4为实现本发明翻转工作的另一种实施方式结构示意图;
26.图5为图4右视立体结构示意图;
27.图6为图4的俯视结构示意图;
28.图7为图6的侧视结构示意图;
29.图8为图7的右视结构示意图;
30.图9为图6中a-a处剖视图;
31.图10为图6中b-b处剖视图;
32.图11为图6中c-c处剖视图;
33.图12为工件在图4示出翻转机上运转的结构示意图;
34.图13为使用图4翻转机的抛丸设备的俯视结构示意图;
35.附图中,100为振动翻转机,101为振动床,102为机架,103为弹簧,104为振动电机,105为翻转通道,106为翻转部,107为工件,108为送料背脊,109为渐变通道,110为接料板,111为出料板,112为第一引导区,113为第二引导区,114为第一斜滑板,115为第一边斜板,116为第二斜滑板,117为第二边斜板,118为放料空间,119为背脊线,120为上级抛丸机,121为下级抛丸机。
具体实施方式
36.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.请参见图3-13所示,振动翻转机100包括产生振动,以提供输送力的振动床101,振动床101的一端为接料端,另一端为出料端,振动床101下方有机架102形成支承,在机架102与振动床101的支承处设置有弹簧103,振动床101的外侧安装有振动电机104,在振动电机104产生振动时,通过弹簧103的缓冲,使振动床101对进入振动床101中工件产生连续的输送力。在振动床101的末端或侧部设置有翻转通道105,翻转通道105包括内侧面为滑移曲面的翻转部106,在重力作用下,从振动床101送来的工件一端与滑移曲面接触,沿着滑移曲面向下滑移,以引导工件107的上表面沿着滑移曲面向滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。通过翻转部106的设置,翻转部106内侧面的滑移曲面,由振动
床101振动输送而来的工件,工件的一端与翻转部106的内侧面形成接触形成向下滑移动作,通过重力、滑移曲面的引导,当工件的重心偏向翻转部106时,工件朝向翻转部106一方形成翻转,工件的上表面贴着翻转部106的内侧面向下滑移,最终使工件的上表面翻转到下方,实现工件的翻身动作,以此确保工件能够实现翻身动作。
38.实施方式一:参见图3示出,当翻转通道105处于振动床101末端时,翻转通道105布置于振动床101出料口的外侧,翻转部106的内侧面正对着振动床101出料口;振动床101送来的工件直接与翻转部106形成接触,工件的最前端与翻转部106的内侧面接触形成支点一,工件的后端于振动床101上形成支点二;工件前行过程中,工件的最前端沿着滑移曲面向下滑移,在工件的重心偏向翻转部106一方时,工件的后端脱离振动床101,工件的上表面则向翻转部106的内侧面贴靠,并沿着内侧面向下滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。如图3中示出,工件的a端先于翻转部106的内侧面接触,在重力、滑移曲面的作用下,工件的a端继续向下滑移,使工件的重心朝向翻转部106形成偏移,工件的则会朝向翻转部106翻转,工件的上表面贴合滑移曲面向下滑移,工件的a端下移到a1状态,工件的b端则下移到b1状态,从而能够使工件实现翻身动作,在翻转过程中,当工件的重心未朝向翻转部106偏移时,工件的a端不与振动床101分离,以保证具有相应的支点。翻转部106可由上方形成向外倾斜的倾斜端和处于下方的曲面段,翻转部106整体呈弧形状,至少在翻转部106的内侧面形成弧形状的滑移曲面。
39.实施方式二:参见图3-11所示,当翻转通道105处于振动床101侧部时,翻转部106设置于振动床101中,翻转部106的内侧面布置方向与振动床101的送料方向相同;在振动床101内设置有送料背脊108,翻转部106处于送料背脊108的下方,翻转部106的端部向送料背脊108侧面延伸,翻转通道105形成于送料背脊108与翻转部106的内侧面之间;在送料背脊108的侧面边缘与翻转部106内侧面之间沿着送料方向形成开口逐渐增大的渐变通道109;此种布置方式中,工件倾斜状态进入翻转通道105时,工件的上端与送料背脊108外侧接触形成支点一,工件的下端与翻转部106的内侧面接触形成支点二;工件前行过程中,工件的下端沿着滑移曲面向下滑移,随着渐变通道109的逐渐增大,工件的重心逐步朝向翻转部106一方偏移,当工件重心偏移到翻转部106一方时,工件的上表面向翻转部106的内侧面贴靠,并沿着内侧面向滑移曲面低处滑移,使工件上表面翻转到下方,实现工件翻转动作。
40.本实施当中一种方式:振动床101的接料端布置有接料板110,用于接收待翻身工件,振动床101的出料端布置有出料板111,用于将翻身后的工件送出;振动床101内从接料板110向出料板111方向高度逐渐降低的多级台阶状,以使工件自接料板110向出料板111平稳的逐级输送。接料板110的高度高于振动床101内,以便于将接收的工件,送入振动床101内,出料板111的高度低于振动床101的尾部,以便于振动床101内的工件,进入出料板111中。
41.本实施当中一种方式:振动床101内设置有第一引导区112、第二引导区113,进入振动床101的工件依次通过第一引导区112、第二引导区113,呈竖立角度逐渐增大的进入翻转通道105中。第一引导区112、第二引导区113大体呈v型,第一引导出处于振动床101内的高度高于第二引导区113处于振动床101内的高度,便于第一引导区112内的工件进入第二引导区113内,引导区的数量可与根据需要来进行选择设置,本技术附图中示出的为选用了两个引导区。
42.本实施当中一种方式:第一引导区112包括第一斜滑板114、与第一斜滑板114形成夹角布置的第一边斜板115,第一斜滑板114与第一边斜板115之间形成第一引导通道;第二引导区113包括第二斜滑板116、与第二斜滑板116形成夹角布置的第二边斜板117,第二斜滑板116与第二边斜板117之间形成第二引导通道;第一边斜板115的内侧面不低于第二边斜板117的内侧面;第一斜滑板114的向下倾斜角度小于第二斜滑板116的向下倾斜角度。当工件进入第一引导通道时,工件贴着第一斜滑板114向前移动,工件的倾斜角度与第一斜滑板114的倾斜角度,当进入第二引导区113时,工件贴着第二斜滑板116向前输送,工件的倾斜角度变为第二斜滑板116的倾斜角度,如若需要保持该倾斜角度从振动床101输出时,将出料板111设置成与第二引导区113倾斜角度相同即可使工件维持该倾斜角度送出;在输送过程中,由于第一边斜板115的内侧面与第二边斜板117的内侧面保持齐平,从而不会对工件的向前移动形成阻碍。
43.本实施当中一种方式:第一斜滑板114与第一边斜板115之间形成90
°
或90
°
以上夹角;第二斜滑板116与第二边斜板117之间形成90
°
或90
°
以上夹角。增大引导区的底部夹角,避免因夹角过小,而造成工件的下端卡在引导区底部的问题。
44.本实施当中一种方式:送料背脊108的外侧面高度不高于第二边斜板的内侧面,翻转部106的内侧面不高于第二斜滑板的内侧面;送料背脊108的下方为供经过渐变通道109翻身后的工件滑入的放料空间118;从第二引导区113进入翻转通道105中的工件,工件的下端沿着滑移曲面向下滑移,随着渐变通道109的逐渐增大,工件的重心逐步朝向翻转部106一方偏移,当工件重心偏移到翻转部106一方时,工件的上表面向翻转部106的内侧面贴靠,并沿着内侧面向滑移曲面低处滑移,使工件上表面翻转到下方,进入放料空间118中。
45.本实施当中一种方式:送料背脊108布置于振动床101中部,送料背脊108沿着振动床101的送料方向进行延伸布置,在送料背脊108的两侧分别设有翻转通道105。背脊的高度从接料端朝向出料端保持一致,整体的背脊高度应超过待翻转工件处于翻转通道105内时的高度,避免工件翻越到相邻翻转通道105中。当设置一个翻转通道105时,待翻转的工件依次进入该翻转通道105内,进行翻转输送动作;当设置多个翻转通道105时,接料板110上待翻转的工件,交替进入各个翻转通道105中,每个翻转通道105中的工件互不干扰,最终翻转后的工件从出料板111处送出,多个翻转通道105的设置,更加适应在线批量化的生产工作。
46.本实施当中一种方式:翻转部106为u形状,送料背脊108为倒u形状,送料背脊108处于翻转部106内的中部上方,呈悬空状布置,在送料背脊108下方与翻转部106低处之间形成放料空间118。
47.下面具体描述本技术实施方式二附图中所示出的具有两翻转通道105的翻转机:机架102、弹簧103、振动床101、振动电机104构成了一个完整的振动输送机,能使槽体上的工件振动前进,振动床101上工件前进方向上没有阻挡工件前进的凸出物。
48.接料板110接来自前道设备输送来待翻转的工件,使工件平铺前行。
49.振动床101内部沿送料背脊108的背脊线119形成左右两侧对称。
50.第一引导区112是由一块整板折弯而成,中部两块的第一斜滑板与左右两块的第一边斜板一起构成w形,最高点就是背脊线119,背脊线119的高度与接料板110平齐。第一斜滑板沿背脊线119向下折弯有夹角a和夹角b两个斜度,最低处与对应的第一边斜板垂直,第一斜滑板与垂直面夹角b,夹角a的角度小于夹角b。
51.第二引导区113是一块整板折弯而成,两个第二斜滑板与左右两块的第二边斜板一起构成w形,最高点就是背脊线119,背脊线119高度与接料板110平齐。第二斜滑板沿背脊线119向下折弯有夹角a和夹角c两个斜度,夹角c大于夹角b,最低处与第二边斜板垂直,第二边斜板与第一边斜板斜度一致,高点与第一边斜板高度一致,下边折弯后与第二斜滑板垂直。
52.翻转部106是一块整板折弯u形而成,翻转部106内侧面的高点与第二边斜板高度一致,u形板的底部用来盛放及输送翻转后的工件。送料背脊108是一块整板折弯倒u形而成,最高点就是背脊线119,沿背脊线119向下折弯有夹角a和夹角c两个斜度,最下边带有斜度,以使得下边缘和u形板的垂直距离适合翻转工件的尺寸相适应。出料板111与翻转部106的底面平齐,保证翻转后的工件平铺输出。
53.请参见图12,当来自前道设备的扁平类工件进入翻转机时,工件底面与接料板110接触,由翻转机振动输送作用下前行,并铺开不重叠。工件前行下个台阶,进入由第一斜滑板和第一边斜板构成的w形状段,沿背脊线119分成左右两个通道前行,工件底面与第一斜滑板接触,工件因第一斜滑板的斜度而倾斜,外侧面与第一边斜板接触。工件继续前行,继续下个台阶,进入由第二斜滑板和第二边斜板构成的深w形状段,工件底面与第二斜滑板接触,工件因第二斜滑板的斜度而进一步倾斜,外侧面与第二边斜板接触。工件继续前行,进入由u形的翻转部106和倒u形的送料背脊108构成段,工件底面与倒u形送料背脊108外部接触,如工件的d端处于上方,工件的c端处于下方,工件的c端底部进入由u形翻转部106和倒u形送料背脊108构成的渐变通道109,由于倒u形送料背脊108下边缘与u形翻转部106之间的距离越来越大,最终,在重力和u形翻转部106内侧面的滑移曲面斜度作用下,工件的c端滑移到c1状态,工件的d端翻转到d1状态,从而实现工件的翻转动作。翻转后,工件原上表面贴上u形翻转部106的内侧面滑入u形翻转部106的底部,变成下表面,至此翻转完成;翻转后的工件由振动输送前行进入出料板111摆平,再由出口进入下道设备处理。
54.请参见图13,采用上面在翻转机侧部布置翻转通道105的连续抛丸设备,包括上级抛丸机120、下级抛丸机121,在两级抛丸机之间布置有上述的振动翻转机100;振动翻转机100的接料端对接上级抛丸机的出料口,振动翻转机100的出料端对接下级抛丸机的进料口,通过振动翻转机100将上级抛丸机排出的工件翻身后,送入到下级抛丸机中。上级抛丸机对工件的上表面进行抛丸,上表面抛丸完成后,将工件送入振动翻转机100中,通过振动翻转机100将工件翻转,使工件的上表面翻转到下方,工件的下表面变为上表面,然后送入下级抛丸机中进行抛丸处理,通过此种方式,能够实现在线连续方式对工件的双面抛丸工作,提升工作效率,保证抛丸质量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1