一种自然导航AGV小车的制作方法
一种自然导航agv小车
技术领域
1.本发明涉及一种agv小车技术领域,尤其涉及一种slam自然导航agv小车。
背景技术:
2.经过这几年的快速发展,agv已经是自动化行业众所周知的了。从2015年受宠的磁条导航、磁钉导航、惯性导航(二维码),到现在流行的激光导航,短短几年时间,agv导航技术快速迭代发展。其中激光无轨导航因为不需要在地面铺设磁条、标志物而大受欢迎,激光无轨导航分为反射板导航和基于环境自然导航。激光反光板导航的精度高,但前期需要反复进行位置定位,施工周期长、成本高。而基于环境自然导航使用的是最先进的导航方式激光雷达+slam(同步定位与地图构建)的定位导航技术,在未知环境中进行自主定位和导航,slam表示在不具备周围环境信息的前提下,让移动机器人在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建周围环境地图。agv小车在物流运输过程中需要通过自动控制实现货物的顶升和放下以及车体的变向,而现有的agv小车的旋转顶升装置在承载能力、平稳性和顶升位置的精度上还有待改进。
技术实现要素:
3.本发明要解决的技术问题,在于提供一种自然导航agv小车,其结构简单,无需不用预先铺设任何轨道,完全依靠使用环境来导航定位,操作方便灵活,运输效率高,且负载量大,平稳性佳及顶升位置精度高。
4.本发明是这样实现的:一种自然导航agv小车,包括
5.一车架,顶部具有一顶盖,底部具有一底盘,所述底盘下方的四个角分别安装有从动轮;
6.一顶升装置,包括顶升板、直流无刷电机、电动推杆、旋转板和光电传感器,所述直流无刷电机的输出端穿设所述顶升板并设有第一齿轮,所述电动推杆的输出端通过铰链支撑座连接于所述顶升板的底面中部,所述顶升板的底面四个角分别通过导向轴支座设有导向轴,所述导向轴的外侧套设有直线轴承,该直线轴承固定连接所述车架;所述顶升板的顶面中部设有一台阶轴,所述台阶轴上可相对转动地套设第二齿轮,且该第二齿轮与所述第一齿轮啮合,所述旋转板固定于所述第二齿轮顶面,所述第二齿轮底面固定有一传感器遮片,所述光电传感器设置于所述顶升板顶面且位于所述第二齿轮的一侧且与所述传感器遮片相对应;
7.两舵轮驱动装置,分别设置于所述底盘中部的左右两侧;
8.一自动充电装置,包括有两个分别设置于车架内部前后两侧的蓄电池、设置于所述车架前侧的充电刷块和设置于墙面的充电板,所述蓄电池与所述充电刷块电连接,并为所述顶升装置、所述舵轮驱动装置供电;
9.两外部传感器,分别设置于所述车架的前后两侧;
10.一控制主板,设置于所述车架内,并连接控制所述顶升装置、所述舵轮驱动装置及
所述自动充电装置;
11.及一slam导航定位模块,设置于所述控制主板上,并连接两所述外部传感器。
12.进一步的,所述外部传感器包括有两个激光雷达和四个摄像头,两个所述激光雷达分别安装于车架前后两侧的对角上,且所述车架的前后两侧分别设有两个所述摄像头。
13.本发明的优点在于:通过设置slam导航定位模块7运用在agv小车上,可以不用预先铺设任何轨道,完全依靠使用环境来导航定位,使其更加灵活和方便,以节约人工,提高物料运输效率,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,更好地实现多agv小车的协调控制,提高了施工和生产效率;通过设置顶升装置可实现货物的顶升和放下,且负载量大,平稳性佳及顶升位置精度高;通过设置舵轮驱动装置可驱动agv小车的变向;通过设置自动充电装置,可实现agv小车的自动充电和为agv小车提供电源;通过设置传感器可实现agv小车获取的环境信息增量式的构建环境地图。
附图说明
14.下面参照附图结合实施例对本发明作进一步的说明。
15.图1为本发明一种自然导航agv小车的结构示意图。
16.图2为本发明一种自然导航agv小车的底部结构示意图。
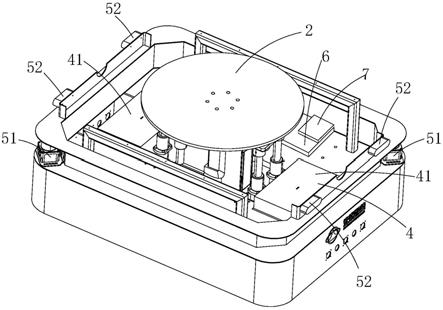
17.图3为本发明一种自然导航agv小车内部结构示意图。
18.图4为本发明顶升装置的结构示意图一。
19.图5为本发明顶升装置的结构示意图二。
20.图6为本发明一种自然导航agv小车控制原理图。
21.附图说明:agv小车100,车架1、顶盖11、底盘12、从动轮13、顶升装置2、顶升板21、直流无刷电机22、电动推杆23、铰链支撑座231、旋转板24、光电传感器25、传感器遮片251、第一齿轮26、导向轴27、导向轴支座271、直线轴承272、滚珠轴承28、台阶轴281、第二齿轮29、舵轮驱动装置3、自动充电装置4、蓄电池41、外部传感器5、激光雷达51、摄像头52、控制主板6、slam导航定位模块7。
具体实施方式
22.请参阅图1至图6所示,本发明一种自然导航agv小车100,包括一车架1、一顶升装置2、两舵轮驱动装置3、一自动充电装置4、两外部传感器5、一控制主板6及一slam导航定位模块7。
23.所述车架1的顶部具有一顶盖11,底部具有一底盘12,所述底盘12下方的四个角分别安装有从动轮13。
24.所述顶升装置2包括顶升板21、直流无刷电机22、电动推杆23、旋转板24和光电传感器25,所述直流无刷电机22的输出端穿设所述顶升板21并设有第一齿轮26,所述电动推杆23的输出端通过铰链支撑座231连接于所述顶升板21的底面中部,所述顶升板21的底面四个角分别通过导向轴支座271设有导向轴27,所述导向轴27的外侧套设有直线轴承272,该直线轴承272固定连接所述车架上,且所述导向轴27可相对所述直线轴承272做上下运动;所述顶升板21的顶面中部设有一台阶轴281,所述台阶轴281上可相对转动地套设第二齿轮29,且该第二齿轮29与所述第一齿轮26啮合,优选的所述台阶轴281上安装有滚珠轴承
28,所述第二齿轮29套设在所述滚珠轴承28外侧并与所述第一齿轮26啮合;所述旋转板24固定于所述第二齿轮29顶面,所述第二齿轮29底面固定有一传感器遮片251,所述光电传感器25设置于所述顶升板21顶面且位于所述第二齿轮29的一侧,并与所述传感器遮片251相对应。
25.所述舵轮驱动装置3分别设置于所述底盘12中部的左右两侧,并驱动所述从动轮13运动。
26.所述自动充电装置4包括有两个分别设置于车架1内部前后两侧的蓄电池41、设置于所述车架1前侧的充电刷块(未图示)和设置于墙面的充电板(未图示),所述蓄电池41与所述充电刷块电连接,控制主板6通过控制自动充电装置4为agv小车100自动充电;所述蓄电池41均为并为所述顶升装置2、所述舵轮驱动装置3供电,所述外部传感器5分别设置于所述车架1的前后两侧。
27.所述外部传感器5包括有两个激光雷达51和四个摄像头52,两个所述激光雷达51分别安装于车架1前后两侧的对角上,且所述车架1的前后两侧分别设有两个所述摄像头52。
28.所述控制主板6设置于所述车架1内,并连接控制所述顶升装置2、所述舵轮驱动装置3及所述自动充电装置4;所述slam导航定位模块7设置于所述控制主板6上并连接两所述外部传感器5。
29.工作原理:所述控制主板6用以接受agv小车的调度指令并执行相应指令;通过外部传感器5的360
°
全方位激光扫描测距检测agv小车100四周,从而获得周围环境的轮廓图,并实时产生所在空间的平面地图传输给slam导航定位模块7;slam导航定位模块7具有实时定位和自主导航功能,通过读取外部传感器5传输的平面地图信息计算自己的位置坐标,并输出导航信息控制舵轮驱动装置3带动agv小车行驶;当agv小车100到达目的地之后接受控制主板6的指令通过顶升装置2实现货物的顶升和放下,所述控制主板6控制所述电动推杆23做上下运动,驱动顶升板21上下运动,其可控制升举的位置的误差为
±
1mm,使得顶升装置2的顶升位置精度高,且顶升板21的四周由直线轴承272和导向轴27可使顶升板21上升和下降的稳定性,旋转板24的旋转由直流无刷电机22提供动力,第一齿轮26带动第二齿轮29进行旋转,旋转板24安装在第二齿轮29上,带动旋转板24旋转,且通过设置光电传感器25和传感器遮片251可控制旋转板24旋转的限位。本发明是一种自然导航agv小车100,该agv小车100机动灵活性更高,大大提升作业效率,且负载量大,平稳性佳及顶升位置精度高。
30.本发明的优点在于:通过设置slam导航定位模块7运用在agv小车100上,可以不用预先铺设任何轨道,完全依靠使用环境来导航定位,使其更加灵活和方便,以节约人工,提高物料运输效率,方便工厂生产线的升级改造和导航路线的变更,实时避障,环境适应能力强,更好地实现多agv小车的协调控制,提高了施工和生产效率;通过设置顶升装置2可实现货物的顶升和放下,且负载量大,平稳性佳及顶升位置精度高;通过设置舵轮驱动装置3可驱动agv小车100的变向;通过设置自动充电装置4,可实现agv小车100的自动充电和为agv小车提供电源;通过设置外部传感器5可实现agv小车100获取的环境信息增量式的构建环境地图。
31.所谓的环境自然导航、无反射板导航大概的原理都是一样的,基于slam的导航原理。slam(simultaneous localization and mapping)即同步定位与建图,指在未知的环境
中,小车通过自身所携带的内部传感器(编码器、imu等)和外部传感器(激光传感器或者视觉传感器)来对自身进行定位,并在定位的基础上利用外部传感器获取的环境信息增量式的构建环境地图。
32.基于环境自然导航的激光导航agv小车中,agv小车在运动过程中通过编码器结合imu计算得到里程计信息,运用agv小车的运动模型得到小车的位姿初估计,然后通过agv小车装载的激光传感器获取的激光数据结合观测模型(激光的扫描匹配)对agv小车位姿进行精确修正,得到agv小车的精确定位,最后在精确定位的基础上,将激光数据添加到栅格地图中,反复如此,agv小车在环境中运动,最终完成整个场景地图的构建。
33.虽然以上描述了本发明的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本发明的范围的限定,熟悉本领域的技术人员在依照本发明的精神所作的等效的修饰以及变化,都应当涵盖在本发明的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1