钛电极块智能搬运及姿态调整装置的制作方法
1.本实用新型涉及的是一种自动化加工领域的技术,具体是一种钛电极块智能搬运及姿态调整装置。
背景技术:
2.电极块由海绵钛通过液压机压制而成,传统方式是电极块压制成型后由人工从料架上搬下,摆放在工作台上,并根据需求翻转电极块使指定面朝上。这种方式存在:劳动强度大、码放不整齐、效率低等问题,因此不适用于量化生产。
技术实现要素:
3.本实用新型针对现有技术存在的上述不足,提出一种钛电极块智能搬运及姿态调整装置,基于自动化理念,能够降低工人工作强度,提高电极块摆放整齐度和摆放效率,适用于大批量生产作业。
4.本实用新型是通过以下技术方案实现的:
5.本实用新型包括:相互对接的下料搬运机构和姿态调整机构,其中:姿态调整机构设置于下料搬运机构的一侧端部。
6.所述的下料搬运机构包括:横推升降平台、纵推升降平台、横推缸和纵推缸,其中:横推升降平台和纵推升降平台平行设置,横推缸设置于横推升降平台上,纵推缸设置于纵推升降平台上。
7.所述的姿态调整机构包括:姿态调整横推缸、工业相机和姿态调整旋转工装,其中:姿态调整旋转工装与纵推升降平台对接,姿态调整横推缸活动设置于姿态调整旋转工装的入口前端,工业相机设置于姿态调整推缸的上方。
8.所述的姿态调整旋转工装包括:旋转工装、旋转支架、伺服电机。其中旋转工装设置于旋转支架上方,伺服电机设置于旋转支架下方,伺服电机驱动旋转工装在旋转支架上旋转。
9.技术效果
10.与现有技术相比,本实用新型基于自动化理念,能够降低工人工作强度,提高电极块摆放整齐度和摆放效率,适用于大批量生产作业。
附图说明
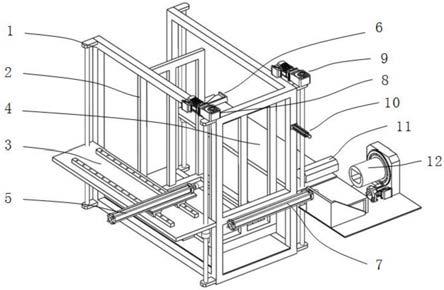
11.图1为本实施例的结构示意图;
12.图2为图1的俯视图;
13.图3为姿态调整旋转工装示意图;
14.图中:机架1、料架2、横推升降平台3、纵推升降平台4、横推缸5、纵推缸6、姿态调整横推缸7、横推升降电机8、纵推升降电机9、工业相机10、电极块11、姿态调整旋转工装12、旋转工装12-1、旋转支架12-2、伺服电机12-3。
具体实施方式
15.如图1和图2所示,本实施例包括:相互对接的下料搬运机构和姿态调整机构,其中:姿态调整机构设置于下料搬运机构的一侧端部。
16.所述的下料搬运机构包括:机架1、横推升降平台3、纵推升降平台4、横推缸5、纵推缸6、横推升降电机8和纵推升降电机9,其中:横推升降平台3和纵推升降平台4分别设置于机架1的两侧,横推缸5设置于横推升降平台3上,纵推缸6设置于纵推升降平台4上,横推升降电机8和纵推升降电机9分别设置于机架1顶部。
17.所述的姿态调整机构包括:姿态调整横推缸7、工业相机10和姿态调整旋转工装12,其中:姿态调整旋转工装12与纵推升降平台4对接,姿态调整横推缸7活动设置于机架1上并与姿态调整旋转工装12的入口对应,工业相机10设置于近姿态调整旋转工装12侧的机架 1上。
18.如图3所示,所述的姿态调整旋转工装包括,旋转工装12-1、旋转支架12-2、伺服电机12-3,其中:旋转工装12-1设置于旋转支架12-2上方,伺服电机12-3设置于旋转支架下方,伺服电机12-3驱动旋转工装12-1在旋转支架12-2上旋转。
19.本装置通过桁吊或液压车将载有电极块11的料架2推入机架1内,下料时横推升降平台3和纵推升降平台4的高度自动调整到料架2需下料的电极块11的层高,横推缸5将电极块11从料架2推出到纵推升降平台4上,纵推升降平台4下降到姿态调整旋转工装12同一高度,纵推缸6将电极块11沿纵推升降平台4推送至姿态调整旋转工装12的入口处,此时工业相机10对电极块11进行拍照判断姿态,得出姿态状态后姿态调整旋转工装12旋转至电极块 11当前的姿态,姿态调整横推缸7将电极块11推入姿态调整旋转工装12中,姿态调整旋转工装12将电极块11旋转到后续加工需要的设定姿态后,姿态调整横推缸7将电极块11推出姿态调整旋转工装12。依此循环,对每个电极块11进行姿态调整,待姿态调整机构调整姿态后,重复如上动作进行后续电极块11下料。
20.与现有技术相比,本装置能够显著降低工人工作强度,提高电极块摆放整齐度和摆放效率,适用于大批量流水线生产作业,姿态调整时工业相机10采集的图像可对电极的完整度、有无破损进行筛选判断。
21.上述具体实施可由本领域技术人员在不背离本实用新型原理和宗旨的前提下以不同的方式对其进行局部调整,本实用新型的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本实用新型之约束。
技术特征:
1.一种钛电极块智能搬运及姿态调整装置,其特征在于,包括:相互对接的下料搬运机构和姿态调整机构,其中:姿态调整机构设置于下料搬运机构的一侧端部;所述的下料搬运机构包括:横推升降平台、纵推升降平台、横推缸和纵推缸,其中:横推升降平台和纵推升降平台平行设置,横推缸设置于横推升降平台上,纵推缸设置于纵推升降平台上。2.根据权利要求1所述的钛电极块智能搬运及姿态调整装置,其特征是,所述的姿态调整机构包括:姿态调整横推缸、工业相机和姿态调整旋转工装,其中:姿态调整旋转工装与纵推升降平台对接,姿态调整横推缸活动设置于姿态调整旋转工装的入口前端,工业相机设置于姿态调整推缸的上方。3.根据权利要求2所述的钛电极块智能搬运及姿态调整装置,其特征是,所述的姿态调整旋转工装包括:旋转工装、旋转支架、伺服电机,其中旋转工装设置于旋转支架上方,伺服电机设置于旋转支架下方,伺服电机驱动旋转工装在旋转支架上旋转。
技术总结
一种钛电极块智能搬运及姿态调整装置,包括:相互对接的下料搬运机构和姿态调整机构,其中:姿态调整机构设置于下料搬运机构的一侧端部;所述的下料搬运机构包括:横推升降平台、纵推升降平台、横推缸和纵推缸,其中:横推升降平台和纵推升降平台平行设置,横推缸设置于横推升降平台上,纵推缸设置于纵推升降平台上;所述的姿态调整机构包括:姿态调整横推缸、工业相机和姿态调整旋转工装,其中:姿态调整旋转工装与纵推升降平台对接,姿态调整横推缸活动设置于姿态调整旋转工装的入口前端,工业相机设置于姿态调整推缸的上方。本实用新型基于自动化理念,降低工人工作强度,提高电极块摆放整齐度和摆放效率,适用于大批量生产作业。适用于大批量生产作业。适用于大批量生产作业。
技术研发人员:陈自强 庞超飞 陈伊冉
受保护的技术使用者:浙江湖州艾浦莱德智能科技有限公司
技术研发日:2021.02.22
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1