省力的长方体搬运工装的制作方法
1.本实用新型属于安装搬运技术领域,涉及一种省力的长方体搬运工装。
背景技术:
2.在水电站安装过程中,经常涉及到重量较重,体积较大,结构为矩形结构的构件,单靠人工搬运时,不易把持受力点,容易滑脱伤人,存在安全隐患,采用大型机械设备搬运空间有限,缺乏灵活性,且成本过高。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种省力的长方体搬运工装,结构简单,采用在相互铰接的两个转动臂两端设置提升臂和夹持臂,提升臂和夹持臂与转动臂连接形成的夹角皆朝向同一侧,当两个夹持臂竖直平行时,提升臂位于同一水平轴线上,接触板与矩形构件侧面抵触增大摩擦力,同时施加两个提升臂向上的提升力使矩形构件脱离支撑面,搬运时不易滑脱,安全可靠,在狭小空间中灵活使用,成本低。
4.为解决上述技术问题,本实用新型所采用的技术方案是:一种省力的长方体搬运工装,它包括转动臂、提升臂、夹持臂和接触板;两个所述的转动臂相互铰接转动,提升臂和夹持臂分别与转动臂的两端连接;提升臂和夹持臂与转动臂连接形成的夹角皆朝向同一侧,接触板位于两个相互对应的夹持臂内侧与其连接;当两个夹持臂竖直平行时,提升臂位于同一水平轴线上。
5.所述转动臂上沿轴向设置多个销孔,位于两个相互重合的销孔与销轴配合。
6.所述提升臂上设置压花。
7.所述接触板为平板,两个相互对应的接触板的对应面上设置相互倾斜交叉的线槽。
8.所述接触板为橡胶板。
9.一种省力的长方体搬运工装,它包括转动臂、提升臂、夹持臂和接触板;两个转动臂相互铰接转动,提升臂和夹持臂分别与转动臂的两端连接;提升臂和夹持臂与转动臂连接形成的夹角皆朝向同一侧,接触板位于两个相互对应的夹持臂内侧与其连接;当两个夹持臂竖直平行时,提升臂位于同一水平轴线上。结构简单,通过在相互铰接的两个转动臂两端设置提升臂和夹持臂,提升臂和夹持臂与转动臂连接形成的夹角皆朝向同一侧,当两个夹持臂竖直平行时,提升臂位于同一水平轴线上,通过接触板与矩形构件侧面抵触增大摩擦力,同时施加两个提升臂向上的提升力使矩形构件脱离支撑面,搬运时不易滑脱,安全可靠,在狭小空间中灵活使用,成本低。
10.在优选的方案中,转动臂上沿轴向设置多个销孔,位于两个相互重合的销孔与销轴配合。结构简单,使用时,当矩形构件的宽度发生变化时,通过拆卸销轴后重新定位销孔的配合点,改变两个接触板之间的夹持距离,适应矩形构件宽度的变化,适应性好,操作简单方便。
11.在优选的方案中,提升臂上设置压花。结构简单,使用时,在施加提升臂向上的提拉力时,位于提升臂上的压花增大了与手部的摩擦力,不易滑脱,安全可靠。
12.在优选的方案中,接触板为平板,两个相互对应的接触板的对应面上设置相互倾斜交叉的线槽。结构简单,使用时,夹持臂施加的夹持力传递给接触板,由接触板与矩形构件抵触夹持;位于接触板与矩形构件的接触面上设置相互交叉的倾斜线槽,增加了与矩形构件表面的接触点,避免矩形构件在搬运移动过程中滑脱。
13.在优选的方案中,接触板为橡胶板。使用时,橡胶板材质的接触板与矩形构件表面接触,其塑性变形性能好,使其与矩形构件表面接触更紧密,进一步提高夹持力。
14.一种省力的长方体搬运工装,它包括转动臂、提升臂、夹持臂和接触板,通过在相互铰接的两个转动臂两端设置提升臂和夹持臂,提升臂和夹持臂与转动臂连接形成的夹角皆朝向同一侧,当两个夹持臂竖直平行时,提升臂位于同一水平轴线上,通过接触板与矩形构件侧面抵触增大摩擦力,同时施加两个提升臂向上的提升力使矩形构件脱离支撑面。本实用新型克服了原安装过程中矩形构件采用人工搬运时容易滑脱伤人,采用机械设备不能在狭小空间内灵活操作的问题,具有结构简单,搬运时不易滑脱,安全可靠,在狭小空间中灵活使用,成本低的特点。
附图说明
15.下面结合附图和实施例对本实用新型作进一步说明:
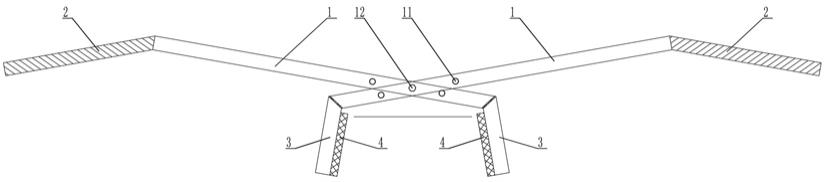
16.图1为本实用新型的结构示意图。
17.图2为本实用新型接触板的结构示意图。
18.图3为本实用新型夹持过程示意图。
19.图4为本实用新型夹持后搬运状态示意图。
20.图中:转动臂1,销孔11,销轴12,提升臂2,夹持臂3,接触板4。
具体实施方式
21.如图1~图4中,一种省力的长方体搬运工装,它包括转动臂1、提升臂2、夹持臂3和接触板4;两个所述的转动臂1相互铰接转动,提升臂2和夹持臂3分别与转动臂1的两端连接;提升臂2和夹持臂3与转动臂1连接形成的夹角皆朝向同一侧,接触板4位于两个相互对应的夹持臂3内侧与其连接;当两个夹持臂3竖直平行时,提升臂2位于同一水平轴线上。结构简单,通过在相互铰接的两个转动臂1两端设置提升臂2和夹持臂3,提升臂2和夹持臂3与转动臂1连接形成的夹角皆朝向同一侧,当两个夹持臂3竖直平行时,提升臂2位于同一水平轴线上,通过接触板4与矩形构件侧面抵触增大摩擦力,同时施加两个提升臂2向上的提升力使矩形构件脱离支撑面,搬运时不易滑脱,安全可靠,在狭小空间中灵活使用,成本低。
22.优选的方案中,所述转动臂1上沿轴向设置多个销孔11,位于两个相互重合的销孔11与销轴12配合。结构简单,使用时,当矩形构件的宽度发生变化时,通过拆卸销轴12后重新定位销孔11的配合点,改变两个接触板4之间的夹持距离,适应矩形构件宽度的变化,适应性好,操作简单方便。
23.优选的方案中,所述提升臂2上设置压花。结构简单,使用时,在施加提升臂2向上的提拉力时,位于提升臂2上的压花增大了与手部的摩擦力,不易滑脱,安全可靠。
24.优选的方案中,所述接触板4为平板,两个相互对应的接触板4的对应面上设置相互倾斜交叉的线槽。结构简单,使用时,夹持臂3施加的夹持力传递给接触板4,由接触板4与矩形构件抵触夹持;位于接触板4与矩形构件的接触面上设置相互交叉的倾斜线槽,增加了与矩形构件表面的接触点,避免矩形构件在搬运移动过程中滑脱。
25.优选的方案中,所述接触板4为橡胶板。使用时,橡胶板材质的接触板4与矩形构件表面接触,其塑性变形性能好,使其与矩形构件表面接触更紧密,进一步提高夹持力。
26.如上所述的省力的长方体搬运工装,安装使用时,在相互铰接的两个转动臂1两端设置提升臂2和夹持臂3,提升臂2和夹持臂3与转动臂1连接形成的夹角皆朝向同一侧,当两个夹持臂3竖直平行时,提升臂2位于同一水平轴线上,接触板4与矩形构件侧面抵触增大摩擦力,同时施加两个提升臂2向上的提升力使矩形构件脱离支撑面,搬运时不易滑脱,安全可靠,在狭小空间中灵活使用,成本低。
27.使用时,当矩形构件的宽度发生变化时,通过拆卸销轴12后重新定位销孔11的配合点,改变两个接触板4之间的夹持距离,适应矩形构件宽度的变化,适应性好,操作简单方便。
28.使用时,在施加提升臂2向上的提拉力时,位于提升臂2上的压花增大了与手部的摩擦力,不易滑脱,安全可靠。
29.使用时,夹持臂3施加的夹持力传递给接触板4,由接触板4与矩形构件抵触夹持;位于接触板4与矩形构件的接触面上设置相互交叉的倾斜线槽,增加了与矩形构件表面的接触点,避免矩形构件在搬运移动过程中滑脱。
30.使用时,橡胶板材质的接触板4与矩形构件表面接触,其塑性变形性能好,使其与矩形构件表面接触更紧密,进一步提高夹持力。
31.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本技术中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1