一种适用于钢捆的焊牌装置的制作方法
1.本实用新型涉及一种焊牌装置,特别是一种用于对钢捆端面进行焊接标牌的焊牌装置,属于焊牌设备技术领域。
背景技术:
2.在钢铁生产领域,生产出来的棒材需要打捆包装然后出厂;其中,每捆棒材在出厂前都需要进行打标,也就是在钢捆上焊接标牌,标牌上记录着钢捆的各项信息,标牌能够帮助工作人员迅速了解钢捆的各项参数,从而提高工作效率;目前的标牌是焊接在钢捆的端面,焊接标牌的作业是由人工来完成的;由于钢捆的数量多,传送速度快,工作人员的焊接效率和精度并不高;人工焊接标牌的效率不仅低下,而且焊接上的标牌由于焊接位置不佳容易掉落丢失;故需要一种焊牌装置,要求它能够高效且精准地完成钢捆端面焊接作业。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种适用于钢捆的焊牌装置,它不仅能够降低工作人员的劳动强度,还能够提高焊牌的效率和精度。
4.本实用新型所述问题是通过以下技术方案解决的:
5.一种适用于钢捆的焊牌装置,包括行程开关、机座、焊牌部分、机械臂、送钉机、制牌机、plc和坐标定位部分;所述机座设置在传送带的一侧,且坐标定位部分设置在机座和传送带之间;所述机械臂、送钉机和制牌机均设置在机座上;所述焊牌部分设置在机械臂上;所述行程开关设置在传送带机架上端最靠近机械臂的位置上;所述坐标定位部分包括方形桶、横向红外传感器、竖向红外传感器、无杆气缸、油缸和u型支架;所述u型支架开口朝下设置在传送带一侧的地面上;所述油缸的缸体垂直设置在u型架中间位置,且油缸的活塞杆伸出方向垂直朝下;所述油缸的活塞杆的端部与无杆气缸的壳体上端面中间位置垂直连接;所述无杆气缸的滑块与方形桶的上端面连接;所述方形桶的中心线与传送带的中心线相互垂直,且方形桶的上端面为水平面;所述横向红外传感器设置在方形桶内壁的上下端面,且竖向红外传感器设置在方形桶内壁的左右两侧面;所述行程开关、焊牌部分、机械臂、送钉机、制牌机、横向红外传感器和竖向红外传感器均与plc连接;所述无杆气缸和油缸的信号控制端均连接plc的信号输出端。
6.上述适用于钢捆的焊牌装置,所述横向红外传感器包括横向红外发射排和横向红外接收排;所述横向红外发射排和横向红外接收排的数量均为多个,且数量相同;所述横向红外发射排沿着方形桶的中心线方向等距设置在方形桶内壁的上端面,且横向红外发射排的中心线与方形桶的中心线相互垂直;所述横向红外接收排设置在方形桶内壁的下端面,且各个横向红外接收排均位于其对应的横向红外发射排的正下方。
7.上述适用于钢捆的焊牌装置,所述竖向红外传感器包括竖向红外发射排和竖向红外接收排;所述竖向红外发射排和竖向红外接收排的数量均为多个,且数量相同;所述竖向红外发射排和竖向红外接收排分别设置在方形桶内壁互相对立的垂直侧壁上;所述竖向红
外发射排和竖向红外接收排均沿着方形桶的中心线方向等距设置在方形桶内壁上;所述竖向红外发射排和竖向红外接收排的中心线平行,且均与方形桶的中心线垂直。
8.上述适用于钢捆的焊牌装置,所述横向红外发射排包括若干个横向红外发射器;所述横向红外接收排包括若干个横向红外接收器,且横向红外发射排内的横向红外发射器的数量和横向红外接收排内横向红外接收器的数量相同;所述横向红外发射排内的横向红外发射器沿着传送带中心线方向等距设置在方形桶内壁的上端面,且方形桶内壁下端面上的横向红外接收器均与其正上方的横向红外发射器相互对应设置;所述横向红外接收器的信号输出端连接plc的信号输入端。
9.上述适用于钢捆的焊牌装置,所述竖向红外发射排包括若干个竖向红外发射器;所述竖向红外接收排包括若干个竖向红外接收器,且竖向红外发射排内的竖向红外发射器的数量和竖向红外接收排内竖向红外接收器的数量相同;所述竖向红外发射排内的竖向红外发射器沿着垂直方向等距设置在方形桶内壁的垂直侧壁上,且另一垂直侧壁上设置有竖向红外接收器,两侧的竖向红外发射器和竖向红外接收器位置一一对应;所述竖向红外接收器的信号输出端连接plc的信号输入端。
10.上述适用于钢捆的焊牌装置,所述焊牌部分包括真空吸盘机构和焊接机构;所述真空吸盘机构和焊接机构均设置在机械臂的顶端;所述真空吸盘机构和焊接机构的信号控制端连接plc的信号输出端。
11.本实用新型通过坐标定位部分有效地定位了钢捆中最突出钢棒的端面坐标,从而使得机械臂能够精准且高效地通过焊牌部分将标牌焊接在钢捆最突出钢棒的端面上,极大提高了标牌在钢棒上的牢固性,使其不易脱落,避免了以往焊接标牌时焊接位置不佳导致标牌脱落的情况发生。
附图说明
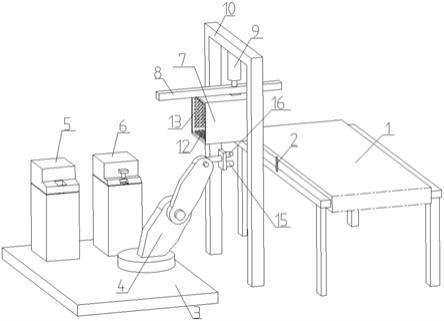
12.图1为本实用新型俯角立体结构示意图;
13.图2为本实用新型仰角立体结构示意图。
14.图中各标号清单为:1.传送带,2.行程开关,3.机座,4.机械臂,5.送钉机,6.制牌机,7.方形桶,8.无杆气缸,9.油缸,10.u型支架,11.横向红外发射器,12.横向红外接收器,13.竖向红外发射器,14.竖向红外接收器,15.真空吸盘机构,16.焊接机构。
具体实施方式
15.参看图1和图2,本实用新型包括行程开关2、机座3、焊牌部分、机械臂4、送钉机5、制牌机6、plc和坐标定位部分;行程开关2用于判断钢捆在传送带1上的位置;机械臂4能够精准带着焊牌部分到达指定坐标进行焊接;送钉机5能够为焊接机构6提供焊钉;制牌机6能够打印出带有此刻传送带1上钢捆信息的标牌;所述坐标定位部分能够精确定位一钢捆材中端面最为突出的钢棒,将其三维坐标进行精确定位。
16.所述机座3设置在传送带1的一侧,且坐标定位部分设置在机座3和传送带1之间;所述机械臂4、送钉机5和制牌机6均设置在机座3上;所述焊牌部分设置在机械臂4上;所述行程开关2设置在传送带1机架上端最靠近机械臂4的位置上。
17.所述坐标定位部分包括方形桶7、横向红外传感器、竖向红外传感器、无杆气缸8、
油缸9和u型支架10;所述油缸9能够带动其他部件向下移动;无杆气缸8的作用在于,当方形桶7下降到与钢捆持平的高度时,无杆气缸8带动方形桶7朝着钢捆移动,从而使方形桶7包围钢捆;所述u型支架10开口朝下设置在传送带1一侧的地面上;所述油缸9的缸体垂直设置在u型架中间位置,且油缸9的活塞杆伸出方向垂直朝下;所述油缸9的活塞杆的端部与无杆气缸8的壳体上端面中间位置垂直连接;油缸9通过伸缩其活塞杆来控制无杆气缸8的上下移动;所述无杆气缸8的滑块与方形桶7的上端面连接;无杆气缸8通过其滑块在水平面上的滑动,来控制方形桶7包围钢捆或者远离钢捆;因为钢捆是垂直放置在传送带1上的,也就是说,钢捆的中心线和传送带1的中心线相互垂直,方形桶7的中心线与传送带1的中心线相互垂直,且方形桶7的上端面为水平面,这确保了方形桶7的通孔能够顺利包围钢捆;所述横向红外传感器设置在方形桶7内壁的上下端面,且竖向红外传感器设置在方形桶7内壁的左右两侧面;所述行程开关2、焊牌部分、机械臂4、送钉机5、制牌机6、横向红外传感器和竖向红外传感器均与plc连接;所述无杆气缸8和油缸9的信号控制端均连接plc的信号输出端。
18.所述横向红外传感器包括横向红外发射排和横向红外接收排;所述横向红外发射排和横向红外接收排的数量均为多个,且数量相同;所述横向红外发射排沿着方形桶7的中心线方向等距设置在方形桶7内壁的上端面,且横向红外发射排的中心线与方形桶7的中心线相互垂直;所述横向红外接收排设置在方形桶7内壁的下端面,且各个横向红外接收排均位于其对应的横向红外发射排的正下方;每个横向红外接收排的正上方都有与其唯一对应的横向红外发射排;每个横向红外发射排所发出的红外线,都由其正下方对应的那个横向红外接收排所接受;横向红外发射排和横向红外接收排关于方形桶7的居中水平面对称。
19.所述竖向红外传感器包括竖向红外发射排和竖向红外接收排;所述竖向红外发射排和竖向红外接收排的数量均为多个,且数量相同;所述竖向红外发射排和竖向红外接收排分别设置在方形桶7内壁互相对立的垂直侧壁上;所述竖向红外发射排和竖向红外接收排均沿着方形桶7的中心线方向等距设置在方形桶7内壁上;所述竖向红外发射排和竖向红外接收排的中心线平行,且均与方形桶7的中心线垂直;竖向红外发射排和竖向红外接收排左右对称。
20.所述横向红外发射排包括若干个横向红外发射器11;所述横向红外接收排包括若干个横向红外接收器12,且横向红外发射排内的横向红外发射器11的数量和横向红外接收排内横向红外接收器12的数量相同;每个横向红外发射器11的正下方都有与其对应的横向红外接收器12;所述横向红外发射排内的横向红外发射器11沿着传送带1中心线方向等距设置在方形桶7内壁的上端面,且方形桶7内壁下端面上的横向红外接收器12均与其正上方的横向红外发射器11相互对应设置;所述横向红外接收器12的信号输出端连接plc的信号输入端。
21.所述竖向红外发射排包括若干个竖向红外发射器13;所述竖向红外接收排包括若干个竖向红外接收器14,且竖向红外发射排内的竖向红外发射器13的数量和竖向红外接收排内竖向红外接收器14的数量相同;每个竖向红外发射器13在其对立面上均有与其对应的竖向红外接收器14;所述竖向红外发射排内的竖向红外发射器13沿着垂直方向等距设置在方形桶7内壁的垂直侧壁上,且另一垂直侧壁上设置有竖向红外接收器14,两侧的竖向红外发射器13和竖向红外接收器14位置一一对应;所述竖向红外接收器14的信号输出端连接plc的信号输入端。
22.所述焊牌部分包括真空吸盘机构15和焊接机构16;所述真空吸盘机构15和焊接机构16均设置在机械臂4的顶端;真空吸盘机构15通过负压吸附标牌;焊接机构16用于将标牌焊接在钢捆端面上;所述真空吸盘机构15和焊接机构16的信号控制端连接plc的信号输出端。
23.实际作业过程:钢捆在传送带1上移动,直至钢捆触发行程开关2,行程开关2将触发信号传递给plc;plc控制传动带1停止运行,此时钢捆停留在机械臂4的一侧;plc将之前工序所采集到的数据传递给制牌机6,制牌机6开始制作标牌,制作好标牌后,发出信号给plc;plc控制机械臂按照设定好的动作去动作,机械臂带动焊接机构16移动至送钉机5处取焊钉,然后机械臂带动真空吸盘机构移动至制牌机6取走标牌;机械臂就位;然后plc控制油缸9动作,油缸9带动无杆气缸8下移到位,无杆气缸8动作带动方形桶7向着钢捆移动,从而将钢捆包围;然后plc控制横向红外发射排按照排列顺序依次动作发出红外线,这时会有相邻的横向红外接收排之一接收到了完整的红外信号,另一个相邻的横向红外接收排被遮挡了一部分,这个被遮挡一部分红外线的横向红外接收排位置与最突出的棒材相对应,然后这个横向红外接收排上的横向红外发射器11按照顺序依次发射红外线,其对面没有接收到红外线的横向红外接收器12的坐标与最突出的棒材的端部坐标相对应;横向红外传感器动作完后,竖向红外传感器动作,且竖向红外传感器的动作步骤与横向红外传感器相同;待到横向红外传感器和竖向红外传感器全部动作完成后,plc将与最突出的棒材的端部所对应的横向红外接收器12和竖向红外接收器14的坐标进行组合分析从而得出最突出棒材端部的坐标;因为油缸9和无杆气缸8动作到位后,方形桶7的位置是固定的,所以各个红外线接收器和红外线发射器的坐标也是每次都一样且确定的;待到确认突出棒材端部的坐标后,无杆气缸8和油缸9依次复位,然后机械臂4动作,将标牌焊接在最突出棒材的端面上,焊接完毕后,机械臂4复位,plc控制传送带1移动,直至下一个钢捆到位,然后重复上述步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1