一种堆垛机的模台防错位装置的制作方法
1.本实用新型属于物料堆垛设备的技术领域,具体为一种堆垛机的模台防错位装置。
背景技术:
2.堆垛机主要用于物料的堆码垛,物料堆垛存放节约空间,节省场地,方便叉车等场内搬运车辆移动,因此堆垛机被广泛应用于各个行业,物料堆垛的整齐与有序排列是对堆垛技术的基本要求,在模台的堆垛中更是重中之重,整齐有序的堆放模台,可以增强已堆好的模台整体的抗扰动能力,使模台堆放的更稳、安全性更高,参差不齐的模台堆放会加大事故率,造成很大的经济损失;现有的模台堆垛机,普遍不具有对模台堆放的自动防错位装置。
技术实现要素:
3.针对现有技术中模台不对齐堆放会加大事故率,造成很大的经济损失;且目前的模台堆垛机,普遍不具有对模台堆放的自动防错位装置的问题,提出了一种堆垛机的模台防错位装置。
4.为了达到上述目的,本实用新型采用的技术方案为:一种堆垛机的模台防错位装置,包括机架和位于机架下方的模台垛,所述机架包括桥架和支腿;其特征在于,还包括错位监测器、模台吊运机、吊具和控制装置;
5.所述错位监测器包括拍照扫描设备或光电感应设备,所述错位监测器与控制装置通信连接,所述控制装置与模台吊运机通信连接。
6.优选的,所述拍照扫描设备是工业相机,所述工业相机安装在桥架底部中心。
7.优选的,所述控制装置包括工控机、交换机和plc控制器,所述工控机、plc控制器均与交换机通信连接;所述工业相机与交换机通信连接,所述plc控制器与模台吊运机通信连接。
8.优选的,所述光电感应设备是光电感应器,所述光电感应器有两个,两个所述光电感应器分别设置在模台垛沿模台吊运机移动方向的两侧底部地面上。
9.优选的,所述控制装置包括plc控制器,所述光电感应器与plc控制器通信连接,所述plc控制器与模台吊运机通信连接。
10.优选的,所述桥架包括纵梁和横梁,所述纵梁和横梁均有两个,两个所述纵梁相互平行,且两个纵梁之间在两端分别与横梁垂直固定连接;所述支腿有四个,分别安装在每个纵梁的两端,且与纵梁和横梁所在的平面垂直。
11.优选的,两个所述纵梁上表面均设有与纵梁长度方向平行的轨道。
12.优选的,所述模台吊运机的数量为四个,每个所述轨道上均设有两个所述模台吊运机,同一轨道上的模台吊运机之间相隔有一定距离,不同轨道上相对的两个模台吊运机之间中心线重合;所述模台吊运机与轨道滑动连接。
13.优选的,同一个所述轨道上的模台吊运机之间相隔的距离大于轨道长度的一半。
14.优选的,所述吊具设在模台吊运机下方,且吊具所在平面平行于水平面;所述吊具在与四个模台吊运机相对应的位置上安装有四个定滑轮,四个所述定滑轮分别与对应位置的模台吊运机通过钢缆连接。
15.与现有技术相比,本实用新型的有益效果为:(1)在机架上方安装工业相机,工控机安装in
‑
vision 6.2 视觉检测软件可以监测吊具上待堆垛的模台与下方已堆垛好的模台是否对齐,工控机对于结果会发送一个命令通过交换机传到plc控制器,来控制模台吊运机动作;(2)plc控制器控制模台吊运机沿轨道移动,带动吊具以及吊具内的模台左右移动,直到模台对齐;对齐后,plc控制器直接控制模台吊运机下放钢缆,堆垛模台;(3)错位监测器还可以为光电感应器,光电感应器有两个,分别设置在模台垛两侧的底部地面上,均通信连接plc控制器,plc控制器再与模台吊运机通信连接,控制其动作使模台对齐。
附图说明
16.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
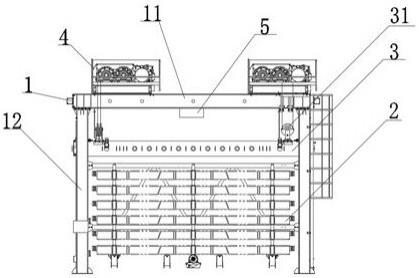
17.图1为采用工业相机的模台防错位装置;
18.图2为采用光电感应器的模台防错位装置;
19.图3为桥架俯视图;
20.图4为吊具俯视图。
21.附图说明:1
‑
机架;11
‑
桥架,12支腿,13
‑
轨道;111
‑
纵梁,112
‑
横梁;
[0022]2‑
模台垛;31
‑
定滑轮;
[0023]3‑
吊具;
[0024]4‑
模台吊运机;
[0025]5‑
工业相机;
[0026]6‑
光电感应器。
具体实施方式
[0027]
为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和实施例对本实用新型做进一步说明。
[0028]
在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是,本实用新型还可以采用不同于在此描述的其他方式来实施,因此,本实用新型并不限于下面公开说明书的具体实施例的限制。
[0029]
实施例1
[0030]
下面结合附图1
‑
4对本实用新型作进一步的描述,一种堆垛机的模台防错位装置,包括机架1和位于机架2下方的模台垛2,所述机架1包括桥架11和支腿12;其特征在于,还包括错位监测器、模台吊运机4、吊具3和控制装置;
[0031]
所述错位监测器为拍照扫描设备,所述错位监测器与控制装置通信连接,所述控制装置与模台吊运机4通信连接;控制装置采用工控机、交换机和plc控制器,拍照扫描设备、工控机和plc控制器均与交换机通信连接,plc控制器与模台吊运机4通信连接。
[0032]
如图1所示,所述拍照扫描设备是工业相机5,所述工业相机5安装在桥架11底部中心;所述控制装置包括工控机、交换机和plc控制器,所述工控机、plc控制器均与交换机通信连接;所述工业相机5与交换机通信连接,所述plc控制器与模台吊运机4通信连接。
[0033]
工业相机5向着底下模台拍照,将照片通过交换机上传至工控机,工控机安装着in
‑
vision 6.2 视觉检测软件,来对工业相机5拍来的照片处理,判断模台是否对齐,从而工控机对于结果会发送一个命令通过交换机传到plc控制器,来控制模台吊运机4动作。
[0034]
in
‑
vision 6.2 视觉检测软件,在设备初次使用时,先打开工业相机5拍照,在软件上对照片显示的区域内绘制检测区域,为堆垛好的模台边界,在检测区域内设置检测区域定位位置,再有模台在吊具3内待堆垛时,相机将照片传到工控机上,in
‑
vision 6.2 视觉检测软件对其处理,判断是否与堆垛好的模台对齐,通过plc控制器自动控制模台吊运机4动作。
[0035]
如图1和3所示,所述桥架11包括纵梁111和横梁112,所述纵梁111和横梁112均有两个,两个所述纵梁111相互平行,且两个纵梁111之间在两端分别与横梁112垂直固定连接;所述支腿12有四个,分别安装在每个纵梁111的两端,且与纵梁111和横梁112所在的平面垂直。
[0036]
如图3所示,两个所述纵梁111上表面均设有与纵梁111长度方向平行的轨道13。
[0037]
如图1和3所示,所述模台吊运机4的数量为四个,每个所述轨道13上均设有两个所述模台吊运机4,同一轨道13上的模台吊运机4之间相隔有一定距离,不同轨道13上相对的两个模台吊运机4之间中心线重合;所述模台吊运机4与轨道13滑动连接。
[0038]
模台吊运机4在循环皮带的带动下移动,模台吊运机4下方设有皮带夹,皮带夹固定在循环皮带上。
[0039]
模台吊运机4连接plc控制器,如果模台两侧与底部模台垛2已对齐,plc控制器控制模台吊运机4下放钢缆,吊具3下降,将模台放到模台垛2上;如果模台两侧与底部模台垛2未对齐,plc控制器控制模台吊运机4沿轨道13移动,带动吊具3以及吊具3内的模台左右移动;在吊具3内的模台与模台垛2对齐后,plc控制器停止模台吊运机4左右移动,下放钢缆,吊具3下降,将模台放到模台垛2上。
[0040]
如图3所示,同一所述轨道13上的模台吊运机4之间相隔的距离大于轨道13长度的一半。
[0041]
如图1和4所示,所述吊具3设在模台吊运机4下方,且吊具3所在平面平行于水平面;所述吊具3在与四个模台吊运机4相对应的位置上安装有四个定滑轮31,四个所述定滑轮31分别与对应位置的模台吊运机4通过钢缆连接。
[0042]
模台吊运机4上设有钢缆缠绕机,钢缆套在定滑轮31外周,并且钢缆缠绕机运转时模台吊运机4和定滑轮31之间的钢缆长度变化,吊具3的高度随之调整。
[0043]
实施例2
[0044]
本实施例与实施例1的区别为:所述错位监测器是光电感应设备,如图2所示,所述光电感应设备是光电感应器6,所述光电感应器6有两个,两个所述光电感应器6分别设置在模台垛2沿模台吊运机4移动方向的两侧底部地面上;所述控制装置包括plc控制器,所述光电感应器6与plc控制器通信连接,所述plc控制器与模台吊运机4通信连接。
[0045]
吊具3上的待堆垛的模台与模台垛2如果未对齐,在水平方向上会超出模台垛2的
边界,挡住了一侧光电感应器6发出的光信号,光电感应器6就会对plc控制器反馈一个信号,plc控制器控制模台吊运机4沿轨道13移动,带动吊具3以及吊具3内的模台左右移动;直到模台对齐,光电感应器6不再对plc控制器反馈信号,plc控制器停止模台吊运机4左右移动,下放钢缆,吊具3下降,将模台放到模台垛2上;若吊具3内的模台已对齐,则plc控制器直接控制模台吊运机4下放钢缆,堆垛模台。
[0046]
以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其他形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其他领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1