垃圾桶的桶体及垃圾桶的制作方法
1.本实用新型的实施例涉及一种智能家具,特别涉及一种垃圾桶的桶体及垃圾桶。
背景技术:
2.智能垃圾桶,作为一种能够实现自动开启和关闭垃圾桶盖,并且还能够完成自动打包的智能家具设备,彻底的解决了传统垃圾桶对使用者存在的卫生感染的隐患,并能有效杜绝各种传染性疾病通过垃圾进行传播和防止桶内垃圾气味溢出,因此,越来越广泛地应用于家庭中。
3.目前,在一些智能垃圾桶中,为了保证垃圾桶内能够装载更多的垃圾,一般会增大垃圾桶桶体内的容积,而常见的做法是增加桶体的高度,这样不但能够增加桶体内的容积,使无断点垃圾袋能够在桶体内装载更多的垃圾,而且不会增大垃圾桶的占地面积,这样可以进一步提高房屋的空间利用率。然而,发明人发现,当垃圾桶内的打包机构在完成对无断点垃圾袋的打包后,打包好的垃圾袋会掉落至垃圾桶桶体的底部,由于桶体过高,导致用户在取出打包垃圾袋的过程中,较为不便,难以取出。另外,由于打包好的垃圾袋在从桶底向桶口提拉的过程中,由于提拉时的受力点主要集中在垃圾袋的顶部,同时,垃圾袋又是柔性的塑料材质,因此,一旦打包好的垃圾袋的重量过重,就会导致垃圾带在提拉时,垃圾袋的顶部会出现断裂、破损等现象。
技术实现要素:
4.本实用新型实施方式的目的在于设计一种垃圾桶的桶体及垃圾桶,可便于用户将打包好的垃圾袋从垃圾桶的桶体内取出,并有效避免了在取出打包垃圾袋的过程中,垃圾袋出现破损、断裂的现象。
5.为解决上述技术问题,本实用新型的实施方式提供了一种垃圾桶的桶体,包括:
6.桶本体;所述桶本体绕预设轴线方向具有:围成容置腔的内壁、与所述内壁相对的外壁;所述桶本体从所述外壁到所述内壁的方向,形成用于取出打包垃圾袋的缺口,所述缺口与所述容置腔连通;
7.开合机构,可转动地设置于所述桶本体上,用于打开或封闭所述缺口。
8.另外,本实用新型的实施方式提供了一种垃圾桶,包括:
9.如上所述桶体;
10.驱动装置,与所述桶体的所述开合机构连接,用于驱动所述开合机构相对于所述桶本体进行转动;
11.主控模块,用于向所述驱动装置发送开门信号或关门信号;
12.其中,所述驱动装置还用于在接收到开门信号时,驱动所述开合机构朝远离所述桶本体的方向进行转动;所述驱动装置还用于在接收到关门信号时,驱动所述开合机构朝向所述桶本体的方向进行转动。
13.本实用新型的实施方式相对于现有技术而言,由于桶本体绕预设轴线方向具有:
围成容置腔的内壁和外壁,并且,桶本体从外壁到内壁的方向形成与容置腔连通的缺口。同时,本实施方式的桶体还包括:开合机构,且开合机构是可转动地设置于桶本体上的,通过开合机构可打开或封闭缺口。从而在实际应用时,用户可通过朝远离桶本体的方向转动开合机构,即可使得桶本体上的缺口能够被开合机构打开,因此,用户可直接从桶本体的缺口处取出打包垃圾袋,比如:以双手托举的形式,或以拖拉的形式取出打包垃圾袋,而不用从桶本体的桶口位置处以提拉形式取出垃圾袋,在方便用户将打包垃圾袋从桶本体内取出的同时,还有效避免了在取出打包垃圾袋的过程中,垃圾袋因自重过大出现破损、断裂的现象。
14.另外,所述开合机构至少包括:侧开门,所述侧开门可转动地设置于所述桶本体上;
15.其中,所述侧开门相对于所述缺口可转动,用于打开或封闭所述缺口。
16.另外,所述侧开门用于在封闭所述缺口时,内嵌于所述缺口。
17.另外,所述缺口绕所述预设轴线方向,具有;承接侧、与所述承接侧相对的连接侧;
18.所述侧开门具有:外表面、与所述外表面相对的内表面、连接所述外表面和所述内表面的承压侧、连接所述外表面和所述内表面的铰接侧;
19.其中,所述铰接侧与所述缺口的所述连接侧通过铰接件转动连接,当所述侧开门封闭所述缺口时,所述侧开门的所述承压侧与所述缺口的所述承接侧相抵接。
20.另外,所述承接侧从所述内壁到所述外壁,有部分朝所述连接侧的方向凸出,形成限位凸起;所述限位凸起相对于所述内壁的一侧,为限位基准面;
21.所述侧开门的所述承压侧从所述外表面到所述内表面,有部分朝远离所述铰接侧的方向凸出,形成定位凸起;所述定位凸起相对于所述外表面的一侧,为定位基准面;
22.其中,当所述侧开门封闭所述缺口时,所述限位凸起的所述限位基准面,与所述定位凸起的所述定位基准面相互抵接。
23.另外,所述限位基准面和所述定位基准面,彼此相互契合。
24.另外,所述限位基准面和所述定位基准面均为磁吸面,所述限位基准面的极性与所述定位基准面的极性相反。
25.另外,所述铰接件为铰链,所述铰链包括:
26.第一铰链板;所述第一铰链板包括:设置于所述连接侧的第一板体、设置于所述第一板体上的第一轴套;
27.第二铰链板;所述第二铰链板包括:设置于所述铰接侧的第二板体、设置于所述第二板体上的第二轴套;
28.轴体,依次插入所述第一轴套和所述第二轴套,使所述第一轴套和所述第二轴套绕所述轴体彼此相互枢转。
29.另外,所述开合机构还包括:设置于所述侧开门上的推拉部件。
30.另外,所述驱动装置包括:电机、与所述电机的主轴同轴连接的传动轴,所述传动轴与所述开合机构连接,所述电机用于通过所述传动轴驱动所述开合机构相对于所述桶本体进行转动。
31.另外,所述垃圾桶还包括:
32.编码器,设置于所述电机上,并与所述主控模块电连接;所述编码器用于检测所述
主轴的旋转角度,并用于将检测的所述主轴的旋转角度实时发送至所述主控模块;
33.其中,当所述电机通过所述传动轴驱动所述开合机构相对于所述桶本体进行转动时,所述主控模块用于在接收到的编码器发送的所述主轴的旋转角度达到预设角度时,关闭所述电机。
34.另外,所述桶本体沿所述预设轴线方向的两端,分别为:桶口和桶底;所述垃圾桶还包括:
35.底座,沿所述预设轴线方向,设置于所述桶本体的所述桶底;所述底座内具有容置空间;
36.其中,所述电机设置于所述容置空间内。
附图说明
37.一个或多个实施方式通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施方式的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
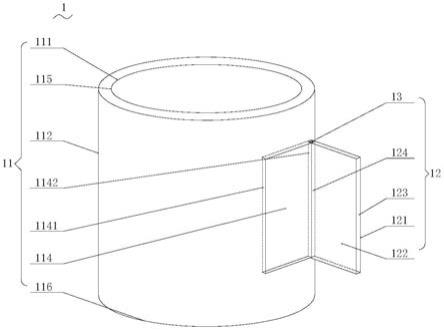
38.图1为本实用新型第一实施方式的垃圾桶的桶体的结构示意图;
39.图2为本实用新型第一实施方式的桶体的剖面示意图;
40.图3为图2中a-a处的剖视图;
41.图4为本实用新型第一实施方式中,侧开门打开缺口时的装配示意图;
42.图5为本实用新型第一实施方式中,侧开门与桶本体铰接的示意图;
43.图6为本实用新型第二实施方式的垃圾桶的结构示意图;
44.图7为本实用新型第二实施方式的垃圾桶的系统模块框图。
具体实施方式
45.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。
46.实施例一
47.本实用新型的第一实施方式涉及一种垃圾桶的桶体,如图1和图2所示,该桶体1包括:桶本体11和开合机构。其中,桶本体11绕预设轴线方向具有:围成容置腔113的内壁111、与内壁111相对的外壁112。并且,在本实施方式中,桶本体11从外壁112到内壁111的方向,形成用于取出打包垃圾袋100的缺口114,该缺口114与容置腔113连通。
48.其次,如图1所示,侧开门12可转动地设置于桶本体11上,用于打开或封闭该缺口114。需要说明的是,在本实施方式中,开合机构至少包括:可转动地设置于桶体1上的侧开门12。而在实际应用时,该开合机构还可采用其他可对缺口进行封闭的部件,而在本实施方式中,不对开合机构的结构作具体限定。
49.通过上述内容不难看出,当需要从容置腔113内取出打包垃圾袋时,用户可通过朝远离桶本体11的方向转动侧开门12,即可使得桶本体11上的缺口114能够被侧开门12打开,
因此,用户可直接从桶本体11的缺口114处取出打包垃圾袋100,比如:以双手托举的形式,或以拖拉的形式取出打包垃圾袋100,而不用从桶本体11的桶口115处以提拉形式取出垃圾袋,在方便用户将打包垃圾袋100从桶本体11内取出的同时,还有效避免了在取出打包垃圾袋的过程中,垃圾袋100因自重过大出现破损、断裂的现象。
50.并且,在本实施方式中,如图2和图3所示,当侧开门12在封闭缺口114时,该侧开门12是内嵌于缺口114的,从而使得此时的桶本体11的外壁112并不会产生任何凸起,提高了整个桶本体11的一体性。
51.具体地说,如图1所示,缺口114绕预设轴线方向,具有;承接侧1141、与承接侧1141相对的连接侧1142。同时,结合图4所示,侧开门12具有:外表面121、与外表面121相对的内表面122、连接外表面121和内表面122的承压侧123、连接外表面121和内表面122的铰接侧124。其中,铰接侧124与缺口114的连接侧1142通过铰接件转动连接,从而使得侧开门12可绕铰接件相对于桶本体11进行转动,从而实现侧开门12对缺口114的打开或封闭。同时,结合图2所示,当侧开门12在封闭缺口114时,侧开门12的承压侧123还与缺口114的承接侧1141相抵接,通过承压侧123与承接侧1141的抵接,可对侧开门12在封闭缺口114时的位置进行限位,从而放置侧开门2在封闭缺口114时出现过转现象。
52.另外,为了使侧开门12在封闭缺口114时,实现承接侧1141与承压侧123之间的抵接,如图4所示,在缺口114中,承接侧1141从桶本体11的内壁111到外壁112,有部分朝连接侧1142的方向凸出,形成限位凸起1143,并且,限位凸起1143相对于内壁111的一侧,为限位基准面11431。同时,如图4所示,在侧开门12中,侧开门12的承压侧123从外表面121到内表面122,有部分朝远离铰接侧124的方向凸出,形成定位凸起125。并且,定位凸起125相对于外表面121的一侧,为定位基准面1251。因此,当侧开门12在封闭缺口114时,结合图3所示,限位凸起1143的限位基准面11431,与定位凸起125的定位基准面1251相互抵接。从而即可对侧开门12在封闭缺口114时的位置,进行限位。
53.并且,为了能够提高限位凸起1143与定位凸起125在相互抵接时的稳定性,在部分实施方式中,限位凸起1143的限位基准面11431和定位凸起125的定位基准面1251之间,是彼此相互契合。比如说,如图3和图4所示,限位基准面11431和定位基准面1251均为彼此相互契合的弧面。当然,在实际应用时,限位基准面11431和定位基准面1251均为彼此相互契合的平面,而在本实施方式中,不对限位基准面11431和定位基准面1251的结构作具体限定。
54.此外,作为优选地方案,在部分实施方式中,限位凸起1143的限位基准面11431、定位凸起125的定位基准面1251均为磁吸面,并且,限位基准面11431的极性与定位基准面1251的极性相反,使得侧开门12在完成对缺口114的封闭后,限位基准面11431和定位基准面1251可彼此相互吸合,从而使得此时的侧开门12不会被轻易打开,提高侧开门12在封闭缺口114时的稳定性。同时,又为了能够方便通过侧开门12打开却口114,如图3所示,在本实施方式中,开合机构还包括:设置于侧开门12上的推拉部件。并且,在本实施方式中,推拉部件为一把手14,通过把手14可方便侧开门12对缺口114的打开。
55.另外,值得一提的是,为了能够使侧开门12可通过铰接件相对于桶本体11实现转动。如图5所示,在本实施方式中,铰接件采用的是铰链13,铰链13包括:第一铰链板131、第二铰链板132和轴体133。其中,如图1所示,第一铰链板131包括:设置于连接侧1142的第一
板体1311、设置于第一板体1311上的第一轴套1312;而第二铰链板132包括:设置于铰接侧124的第二板体1321、设置于第二板体1321上的第二轴套1322;另外,轴体133依次插入第一轴套1312和第二轴套1322,使得第一轴套1312和第二轴套1322可绕轴体133彼此相互枢转,从而即可实现侧开门12相对于桶本体11的转动。
56.实施例二
57.本实用新型的第二实施方式涉及一种垃圾桶,如图6和图7所示,本实施方式的垃圾桶包括:如第一实施方式所述的桶体1、驱动装置2和主控模块。
58.其中,驱动装置2与桶体1的侧开门12连接,该驱动装置2用于驱动侧开门12相对于桶本体11进行转动。另外,主控模块还用于向驱动装置2发送开门信号或关门信号。
59.在实际应用时,结合图7所示,当驱动装置2在接收到开门信号时,驱动装置2直接驱动侧开门12朝远离桶本体11的方向进行转动。而当驱动装置2在接收到关门信号时,驱动装置2直接驱动侧开门12朝向桶本体11的方向进行转动。
60.由此不难看出,由于本实施方式的垃圾桶可根据主控模块所述发出的信号,即可实现侧开门12对缺口114的打开或封闭。从而使用户不用从桶本体11的桶口115处以提拉形式取出垃圾袋,在方便用户将打包垃圾袋100从桶本体11内取出的同时,还有效避免了用于在取出打包垃圾袋100的过程中,垃圾袋100因自重过大出现破损、断裂的现象。
61.具体地说,在本实施方式中,如图6所示,驱动装置2包括:电机21、与电机21的主轴211同轴连接的传动轴22,传动轴22与侧开门12连接,使得电机21可通过传动轴22驱动侧开门12相对于桶本体11进行转动,从而实现侧开门12对缺口114的打开或封闭。
62.另外,值得一提的是,为了使得驱动装置2对侧开门12的开启角度进行准确控制,如图6所示,本实施方式的垃圾桶还包括:编码器3,该编码器3设置于电机21上。同时,结合图7所示,编码器3还与主控模块电连接。在实际应用时,当电机21通过传动轴22驱动侧开门12相对于桶本体11进行转动时,可由编码器3实时检测电机主轴211的旋转角度,并将检测的主轴211的旋转角度实时发送至主控模块,而主控模块用于在接收到的编码器3发送的主轴的旋转角度达到预设角度时,关闭电机21。由此不难看出,通过编码器3可对电机21的主轴211的旋转角度实现精确检测。
63.此外,值得注意的是,在本实施方式中,如图6所示,桶本体11沿预设轴线方向的两端,分别为:桶口115和桶底116。同时,作为优选地方案,本实施方式的垃圾桶还包括:底座4,并且,该底座4沿预设轴线方向,设置于桶本体11的桶底116。该底座4内具有容置空间41。在实际应用时,沿预设轴线方向,可在桶本体11的桶底116处开设与缺口114连通的轴孔(图中为表示),同时,将驱动装置2的电机21设置于底座4的容置空间41内,而驱动装置2的传动轴22可插入桶本体11的桶底116的轴孔,并直接与侧开门12连接,由此不难看出,在不影响驱动装置2对侧开门12驱动的同时,本实施方式的垃圾桶还可通过底座4实现对电机21的安装固定。
64.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施方式,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1