多功能自封袋防臭垃圾桶的制作方法
1.本实用新型涉及防臭垃圾桶技术领域,具体为多功能自封袋防臭垃圾桶。
背景技术:
2.防臭垃圾桶是指可以减少异味扩散的垃圾桶,在一些特殊情况下,比如婴儿的尿不湿,厕所的垃圾桶与厨房易腐垃圾夏天容易产生异味,但现有的传统垃圾桶均无法防止异味扩散到空气中,会影响人们生活环境中的空气质量。减少空气异味,并且自动封袋防止臭味溢出,提高生活质量。
3.现有已公开的专利:垃圾桶用的防臭隔板装置,申请号为cn201720629518.0,其公开的申请文件解决了异味扩散的问题,但是文件中公开的防臭隔板位于垃圾袋的上方,垃圾易搞脏防臭隔板,会造成防臭隔板难以清洗,同时防臭隔板是采用房门一样的轴向向下转动方式进行控制的,会导致垃圾桶空间浪费比较大。
4.现有已公开的专利:一种垃圾桶防臭夹,申请号为cn201922339320.0,其公开的申请文件解决了上述专利中防臭隔板易脏的问题,但是其申请文件中公开的:驱动所述推动机构移动的横杆机构只能推动板子轴向向下转动,而且防臭板平放状态会有一定空隙,易造成卡死得风险。
5.现有已公开的专利:密封垃圾桶,申请号为cn201910222231.x,其申请文件中存在与上述专利:垃圾桶用的球形装置容易被湿垃圾污染。
6.现有已公开的专利:无须等待开盖就可扔垃圾的垃圾桶cn2020111459740,其公开部分解决垃圾装满后向下旋转盖子被卡的问题。
7.现有已公开的专利:一种收口打包机构及智能垃圾桶cn202021040149x,
8.其公开一对相对靠拢或同步远离的压杆无法承受垃圾重量及会被卡的风险。
9.现有已公开专利:一种封口装置cn2018214940482,具体公开在两杆交叉在边角封袋的杆子无法防臭无法承受重量。
10.为解决以上问题,我们提出了多功能自封袋防臭垃圾桶,可实现垃圾桶内部的防臭隔离的效果,同时垃圾不易对防臭隔板造成污染,防臭隔板的设计会减少对垃圾桶空间的浪费,同时可在防臭隔板上实现热熔自封袋的技术。
技术实现要素:
11.为实现以上多功能自封袋防臭垃圾桶目的,本实用新型通过以下技术方案予以实现:多功能自封袋防臭垃圾桶,包括中桶,所述中桶的内部设置有热熔自封夹板,所述中桶侧壁开设有导向孔槽,所述热熔自封夹板表面的侧边设置有热熔封边组件。
12.所述中桶的内部安装有支架,热熔自封夹板两个为一组,对称分布在支架内部的两侧,热熔封边组件由发热丝与弹性块组成,分别位于两个热熔自封夹板相对应的侧边,热熔自封夹板的侧表面设计有导向块,位于导向孔槽的内部,支架的内部转动连接有支撑转板,所述支架的表面设置有导向杆,所述导向杆的表面滑动连接有卡块,所述热熔自封夹板
靠近支撑转板一侧的表面设置有转接件。
13.进一步的,所述支撑转板两个为一组,对称分布在支架内部的两侧,支撑转板远离支架一侧的侧边与转接件转动连接,导向杆对称分布在支撑转板沿其轴杆方向的两侧,卡块两个为一组,同组中两个卡块位于同一导向杆的表面,卡块的表面开设有卡口,同时与两个热熔自封夹板侧表面的导向块转动连接。
14.所述支架的表面设置有驱动机构,所述驱动机构包括驱动器一,所述驱动器一的内部设置有传动带,所述驱动机构还包括卡块。
15.进一步的,所述传动带有两组,与两个导向杆相对应,传动带的皮带面呈竖向分布,两组传动带之间采用带连接,两个卡块表面的卡口分别与对应的传动带中两个不同皮带的表面连接。
16.进一步的,所述传动带有两组,与两个导向杆相对应,传动带的皮带面呈水平面分布,两组传动带之间设计有传动杆,传动杆分别与两组传动带中对应的皮带轮连接,两个卡块表面的卡口分别与对应的传动带中两个不同皮带的表面连接。
17.所述支架的表面设置有封袋机构,所述封袋机构包括发热模块支杆,所述发热模块支杆的内部设置有发热条,所述封袋机构包括收拢支杆,所述收拢支杆的内部设置有弹性条。
18.进一步的,所述发热模块支杆和收拢支杆与折叠板呈垂直分布,发热条与弹性条相对应,封袋机构的侧边亦设计有驱动机构,发热模块支杆和收拢支杆的两端分别与驱动机构内部对应的卡块连接。
19.还包括桶体,所述中桶的上表面设置有控制器,所述中桶的上表面转动连接有上盖,所述上盖的下表面设置有驱动器二,所述卡块的表面设置有传感器,所述桶体的内部设置有吸风装置。
20.进一步的,所述控制器包括人体检测器、人工按键、声光报警器,人体检测器与驱动器一和驱动器二之间为电连接,人工按键用于控制桶体与中桶之间的开合,声光报警器与驱动器一之间为电连接,传感器有两个,其中一个位于靠近驱动器一一侧的卡块的表面,另一个位于驱动器一的表面,两个传感器的位置相对应,与驱动器一之间为电连接。
21.与现有技术相比,本实用新型具有以下有益效果:
22.1、该多功能自封袋防臭垃圾桶,通过驱动器一与传动带的配合使用,可利用传动带两侧边皮带的反向传动对同组中的两个卡块进行反向移动控制,卡块和导向杆与支撑转板的配合使用,可实现对热熔自封夹板的水平伸展或收缩移动控制,减少对垃圾桶空间的浪费,热熔自封夹板伸展时,可形成漏斗型空间,可以承受尿不湿等比较重的物体,同时便于实现热熔自封袋的技术,热熔自封夹板的水平收缩,可防止出现卡死的现象。
23.2、该多功能自封袋防臭垃圾桶,通过控制器与驱动器一和驱动器二的配合使用,可对上盖进行感应控制,同时可自动控制热熔自封夹板的开启和闭合,防止桶体内部的异味扩散,同时可及时提醒对桶体中的垃圾袋进行打包处理,防止桶体中垃圾过多,造成异味扩散。
附图说明
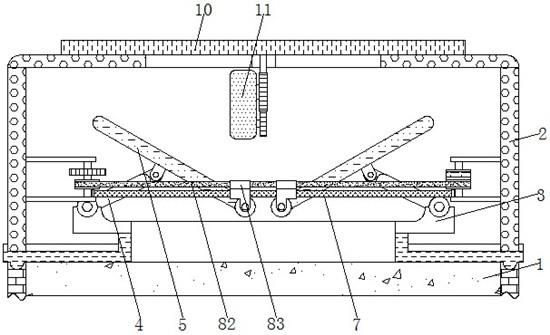
24.图1为本实用新型主视结构示意图一;
25.图2为本实用新型主视结构示意图二;
26.图3为本实用新型俯视结构示意图;
27.图4为本实用新型驱动机构相关结构示意图一;
28.图5为本实用新型驱动机构相关结构示意图二;
29.图6为本实用新型中桶结构示意图;
30.图7为本实用新型侧视结构示意图;
31.图8为本实用新型立体结构示意图一;
32.图9为本实用新型封袋机构相关结构示意图;
33.图10为本实用新型立体结构示意图二;
34.图11为本实用新型操作流程示意图。
35.图中:1、桶体;2、中桶;21、导向孔槽;3、支架;4、支撑转板;5、热熔自封夹板;51、热熔封边组件;511、发热丝;512、弹性块;6、转接件;7、导向杆;8、驱动机构;81、驱动器一;82、传动带;83、卡块;9、控制器;10、上盖;11、驱动器二;12、传感器;13、吸风装置;14、封袋机构;141、发热模块支杆;142、发热条;143、收拢支杆;144、弹性条。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.该多功能自封袋防臭垃圾桶的实施例如下:
38.实施例一:
39.请参阅图1-图10,多功能自封袋防臭垃圾桶,包括桶体1,中桶2,中桶2侧壁开设有导向孔槽21,用于热熔自封夹板5的导向移动,中桶2的内部安装有支架3,中桶2的内部转动连接有支撑转板4,支撑转板4两个为一组,对称分布在支架3内部的两侧,用于带动热熔自封夹板5移动,支架3的内部设置有热熔自封夹板5,热熔自封夹板5两个为一组,对称分布在支架3内部的两侧,用于防止桶体1中的异味扩散,热熔自封夹板5的侧表面设计有导向块,位于导向孔槽21的内部,用于热熔自封夹板5的与中桶2之间的导向移动和密封,热熔自封夹板5表面的侧边设置有热熔封边组件51,热熔封边组件51由发热丝511与弹性块512组成,分别位于两个热熔自封夹板5相对应的侧边,用于对垃圾袋进行密封,热熔自封夹板5靠近支撑转板4一侧的表面设置有转接件6。
40.支撑转板4远离支架3一侧的侧边与转接件6转动连接,支架3的表面设置有导向杆7,导向杆7对称分布在支撑转板4沿其轴杆方向的两侧,用于卡块83的移动,导向杆7的表面滑动连接有卡块83,卡块83两个为一组,同组中两个卡块83位于同一导向杆7的表面,卡块83的表面开设有卡口,同时与两个热熔自封夹板5侧表面的导向块转动连接。
41.支架3的表面设置有驱动机构8,用于驱动卡块83移动,驱动机构8包括驱动器一81,用于传动带82的传动,驱动器一81的内部设置有传动带82,传动带82有两组,与两个导向杆7相对应,传动带82的皮带面呈竖向分布,两组传动带82之间采用带连接,用于带动卡块83移动,驱动机构8还包括卡块83,两个卡块83表面的卡口分别与对应的传动带82中两个
不同皮带的表面连接,与支撑转板4配合,用于热熔自封夹板5的伸展或收缩。
42.中桶2的上表面设置有控制器9,控制器9包括人体检测器、人工按键、声光报警器,人体检测器与驱动器一81和驱动器二11之间为电连接,人工按键用于控制桶体1与中桶2之间的开合,声光报警器与驱动器一81之间为电连接,中桶2的上表面转动连接有上盖10,上盖10的下表面设置有驱动器二11,用于驱动上盖10转动,卡块83的表面设置有传感器12,传感器12有两个,其中一个位于靠近驱动器一81一侧的卡块83的表面另一个位于驱动器一81的表面,两个传感器12的位置相对应,与驱动器一81之间为电连接,用于控制驱动器一81的启动,桶体1的内部设置有吸风装置13,用于桶体1内部的吸风。
43.支架3的表面设置有封袋机构14,与热熔自封夹板5配合,用于对垃圾袋进行封袋处理,封袋机构14的侧边亦设计有驱动机构8,发热模块支杆141和收拢支杆143的两端分别与驱动机构8内部对应的卡块83连接,用于带动发热模块支杆141和收拢支杆143移动,封袋机构14包括发热模块支杆141,用于带动发热条142移动,发热模块支杆141的内部设置有发热条142,发热条142与弹性条144相对应,与弹性条144配合,对垃圾袋进行封袋操作,封袋机构14包括收拢支杆143,收拢支杆143的内部设置有弹性条144,与热熔自封夹板5配合,用于对垃圾袋进行收拢。
44.实施例二:
45.请参阅图1-图10,多功能自封袋防臭垃圾桶,包括桶体1,中桶2,中桶2侧壁开设有导向孔槽21,用于热熔自封夹板5的导向移动,中桶2的内部安装有支架3,支架3的内部转动连接有支撑转板4,支撑转板4两个为一组,对称分布在支架3内部的两侧,用于带动热熔自封夹板5移动,中桶2的内部设置有热熔自封夹板5,热熔自封夹板5两个为一组,对称分布在支架3内部的两侧,用于防止桶体1中的异味扩散,热熔自封夹板5的侧表面设计有导向块,位于导向孔槽21的内部,用于热熔自封夹板5的与中桶2之间的导向移动和密封,热熔自封夹板5表面的侧边设置有热熔封边组件51,热熔封边组件51由发热丝511与弹性块512组成,分别位于两个热熔自封夹板5相对应的侧边,用于对垃圾袋进行密封,热熔自封夹板5靠近支撑转板4一侧的表面设置有转接件6。
46.支撑转板4远离支架3一侧的侧边与转接件6转动连接,支架3的表面设置有导向杆7,导向杆7对称分布在支撑转板4沿其轴杆方向的两侧,用于卡块83的移动,导向杆7的表面滑动连接有卡块83,卡块83两个为一组,同组中两个卡块83位于同一导向杆7的表面,卡块83的表面开设有卡口,同时与两个热熔自封夹板5侧表面的导向块转动连接。
47.支架3的表面设置有驱动机构8,用于驱动卡块83移动,驱动机构8包括驱动器一81,用于传动带82的传动,驱动器一81的内部设置有传动带82,传动带82有两组,与两个导向杆7相对应,传动带82的皮带面呈水平面分布,两组传动带82之间设计有传动杆,传动杆分别与两组传动带82中对应的皮带轮连接,用于带动卡块83移动,驱动机构8还包括卡块83,两个卡块83表面的卡口分别与对应的传动带82中两个不同皮带的表面连接,与支撑转板4配合,用于热熔自封夹板5的伸展或收缩。
48.中桶2的上表面设置有控制器9,控制器9包括人体检测器、人工按键、声光报警器,人体检测器与驱动器一81和驱动器二11之间为电连接,人工按键用于控制桶体1与中桶2之间的开合,声光报警器与驱动器一81之间为电连接,中桶2的上表面转动连接有上盖10,上盖10的下表面设置有驱动器二11,用于驱动上盖10转动,卡块83的表面设置有传感器12,传
感器12有两个,其中一个位于靠近驱动器一81一侧的卡块83的表面另一个位于驱动器一81的表面,两个传感器12的位置相对应,与驱动器一81之间为电连接,用于控制驱动器一81的启动,桶体1的内部设置有吸风装置13,用于桶体1内部的吸风。
49.支架3的表面设置有封袋机构14,与热熔自封夹板5配合,用于对垃圾袋进行封袋处理,封袋机构14的侧边亦设计有驱动机构8,发热模块支杆141和收拢支杆143的两端分别与驱动机构8内部对应的卡块83连接,用于带动发热模块支杆141和收拢支杆143移动,封袋机构14包括发热模块支杆141,用于带动发热条142移动,发热模块支杆141的内部设置有发热条142,发热条142与弹性条144相对应,与弹性条144配合,对垃圾袋进行封袋操作,封袋机构14包括收拢支杆143,收拢支杆143的内部设置有弹性条144,与热熔自封夹板5配合,用于对垃圾袋进行收拢。
50.在使用时,当人体靠近桶体1时,此时控制器9内部的人体检测器会检测到,并将信号传送给驱动器一81和驱动器二11,驱动器二11启动,并控制上盖10打开,驱动器一81的启动会带动传动带82移动,传动带82回同步带动同组中的两个卡块83做反向移动,卡块83会带动热熔自封夹板5的下端向支撑转板4的反向移动,同时在支撑转板4的作用下,热熔自封夹板5开始向趋于竖直方向转动,最终两个热熔自封夹板5相互分离,桶体1与中桶2之间的通道打开。
51.卡块83在导向杆7的表面移动时,表面带有传感器12的卡块83最终会与驱动器一81表面的传感器12接触,此时驱动器一81会停止运作,同时热熔自封夹板5保持现有状态,此时即可将垃圾放置在桶体1中,当人体远离桶体1时,控制器9中的人体检测器感应不到人体,相应地,驱动器一81会反向启动,同时通过传动带82带动同组中的两个卡块83做相向移动,卡块83与支撑转板4配合,带动两个热熔自封夹板5相向移动并接触,并最终使两个热熔自封夹板5呈漏斗型分布。
52.当桶体1内部的垃圾袋被装满时,根据垃圾桶内部垃圾桶的装满程度,可以选择利用热熔自封夹板5表面的热熔封边组件51对垃圾袋进行封口操作,或者利用封袋机构14对垃圾袋进行封袋操作,当选择热熔封边组件51时,当两个热熔自封夹板5相向运动时,此时通过控制器9控制与封袋机构14对应的驱动机构8启动,此时驱动机构8内部的传动带82和卡块83配合,会带动发热模块支杆141和收拢支杆143移动,发热模块支杆141和收拢支杆143与热熔自封夹板5配合,对垃圾袋进行收拢,然后控制发热丝511发热,发热丝511通过与弹性块512配合,对垃圾袋进行封袋操作。
53.当选择封袋机构14对垃圾袋进行封袋操作时,当两个热熔自封夹板5相向运动时,同时控制发热模块支杆141和收拢支杆143移动,发热模块支杆141和收拢支杆143与热熔自封夹板5配合,对垃圾袋进行收拢,然后控制发热条142发热,发热条142通过与弹性条144配合,对垃圾袋进行封袋操作,然后操控控制器9中的人工按键将中桶2与桶体1分离,此时即可将垃圾袋从桶体1中取出。
54.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1